文章目录
卷积神经网络经典模型 – InceptionNet
综述与模型创新突破点
LeNet神经网络问世,标志着卷积神经网络的发展迈入一个新的里程碑。后续提出AlexNet,VggNet方法都是通过堆叠卷积-池化层的方法来提高模型预测的准确度,然而LeNet,AlexNet,VggNet模型的共同点除了是通过增大模型精度(以牺牲算力为代价来提高模型精度),同时在卷积层的角度,我们发现卷积核的尺寸是单一的,这不利于宏观细节特征相兼顾。因此我们提出InceptionNet网络结构,
通过设置多种卷积核尺寸来兼顾宏观细节特征的提取;
【创新点】:
-
引入Inceotion结构,
旨在融合不同尺度的特征信息
-
使用
1
×\times
×
1
的卷积核进行降维以及映射处理 -
添加两个辅助分类器帮助训练,
确保了即便是隐藏单元和中间层也参与了特征计算,在Inception网络中起到一种调整的效果并且能防止网络发生过拟合
-
丢弃全连接层,使用平均池化层,以
大大减少模型参数
模型结构
Inception模块
【设计思想】
:
-
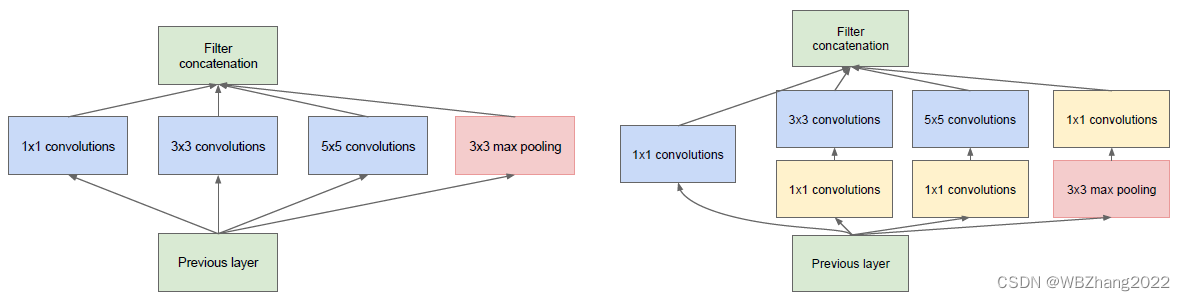
在论文中我们提出了Inception模块,其目的就是通过设置不同尺寸的卷积核提取从宏观到微观的特征,融合不同尺度的特征信息,如下两幅图是提出的两种Inception模块内部的两种基本结构,其两者的本质区别在于是否需要经过一个
1
×\times
×
1
卷积,
使用该卷积的目的是降维,以减少模型参数,降低模型的复杂度,防止过拟合
; -
将输入的原始数据放在不同的提取特征通道得到不同的特征层
(注意:每个分支所得的特征矩阵高和宽必须相同)
,随后将特征图分别进行拼接
- 采用不同的提取特征通道站在模型训练的角度来看,有利于实现并行计算,有利于模型训练加速
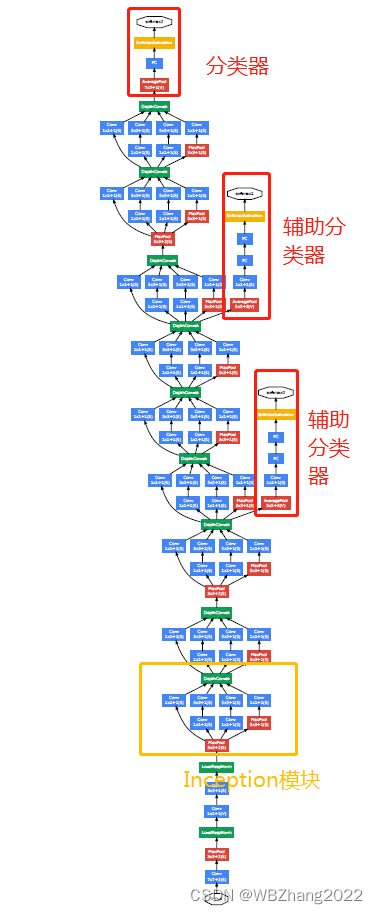
GoogLeNet – InceptionNet模型的具体实现
GoogLeNet模型就是由若干个Inception模块堆叠构成的,但是值得注意的是,如图所示模型多出两个分支这两个分支就是
辅助分类器
,引入辅助分类器的方法目的就是调整效果防止网络发生过拟合
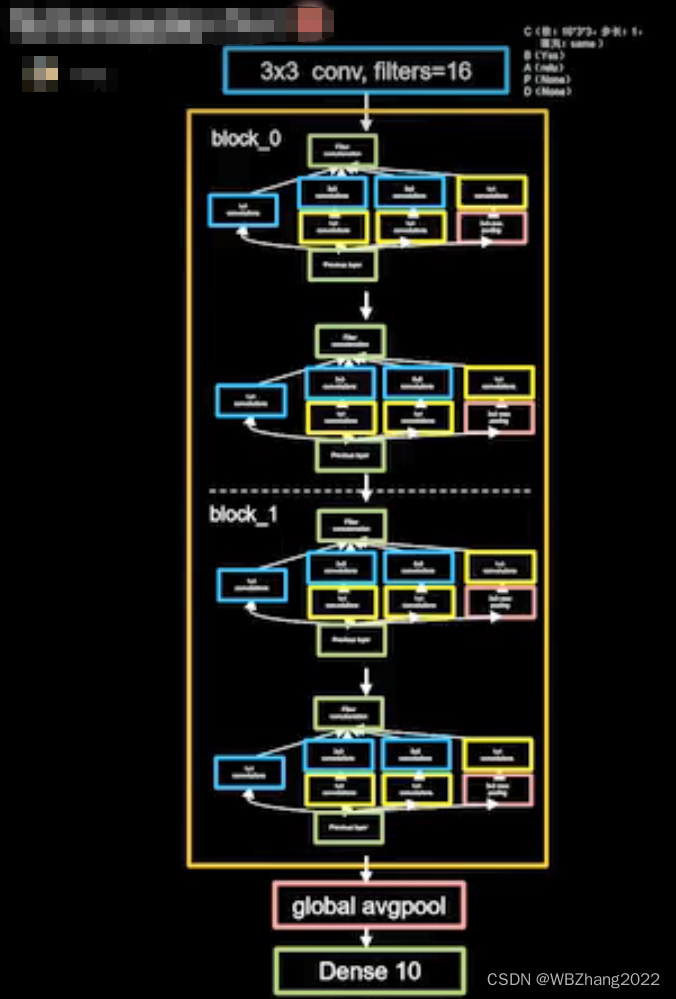
模型复现
我们基于Tensorflow2.0复现一个简单的InceptionNet网络来加深对这一个神经网络模型的工作原理的理解
复现构成Inception模块的子模块
## Inception模块由若不同尺寸的卷积核构成
class ConvBNRelu(Model):
def __init__(self,channels,kernel_size=3,strides=1,padding='same'):
super(ConvBNRelu, self).__init__()
self.model = tf.keras.models.Sequential([
Conv2D(channels,kernel_size,strides=strides,padding=padding),
BatchNormalization(),
Activation('relu')
])
def call(self,x):
x = self.model(x)
return x
复现Inception模块
## 设置不同的卷积核(不同提取特征的分支),得到Inception模块
class InceptionBlock(Model):
def __init__(self,channels,strides=1):
super(InceptionBlock, self).__init__()
self.channels = channels
self.strides = strides
## 分支1
self.c1 = ConvBNRelu(channels,kernel_size=1,strides=strides)
## 分支2
self.c2_1 = ConvBNRelu(channels,kernel_size=1,strides=strides)
self.c2_2 = ConvBNRelu(channels,kernel_size=3,strides=1)
## 分支3
self.c3_1 = ConvBNRelu(channels,kernel_size=1,strides=strides)
self.c3_2 = ConvBNRelu(channels,kernel_size=5,strides=1)
## 分支4
self.p4_1 = MaxPool2D(3,strides=1,padding='same')
self.c4_2 = ConvBNRelu(channels,kernel_size=1,strides=strides)
def call(self,x):
x1 = self.c1(x)
x2_1 = self.c2_1(x)
x2_2 = self.c2_2(x2_1)
x3_1 = self.c3_1(x)
x3_2 = self.c3_2(x3_1)
x4_1 = self.p4_1(x)
x4_2 = self.c4_2(x4_1)
# 将四个分支按照深度的顺序拼接起来
x = tf.concat([x1,x2_2,x3_2,x4_2],axis=3)
return x
搭建InceptionNet模型
## 将模型封装在一个类中
class InceptionNet(Model):
def __init__(self,num_blocks,num_classes,init_channels=16,**kwargs):
super(InceptionNet, self).__init__(**kwargs)
self.in_channels = init_channels
self.out_channels = init_channels
self.num_blocks = num_blocks
self.init_channels = init_channels
## 由若干个Inception模块堆叠构成的
self.c1 = ConvBNRelu(init_channels)
self.blocks = tf.keras.models.Sequential()
for block_id in range(num_blocks):
for layer_id in range(2):
if layer_id == 0:
block = InceptionBlock(self.out_channels, strides=2)
else:
block = InceptionBlock(self.out_channels, strides=1)
self.blocks.add(block)
# 经过一个Inception Block 输出通道数会翻4倍
self.out_channels *= 2 # 出于计算效率每次乘2,即在二进制中向左移一位
self.p1 = GlobalMaxPool2D()
self.f1 = Dense(num_classes,activation='softmax')
def call(self,x):
x = self.c1(x)
x = self.blocks(x)
x = self.p1(x)
y = self.f1(x)
return y
版权声明:本文为weixin_44944722原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。