楼主的运气比较好,标定过程只遇到一个坑
流程
在标定完毕后,将标定好的文件更名为:camera_calibration.yaml
粘贴到:~/ros_exploring/robot_perception/robot_vision目录下
标定好的文件内容如图(这是我自己的标定结果)
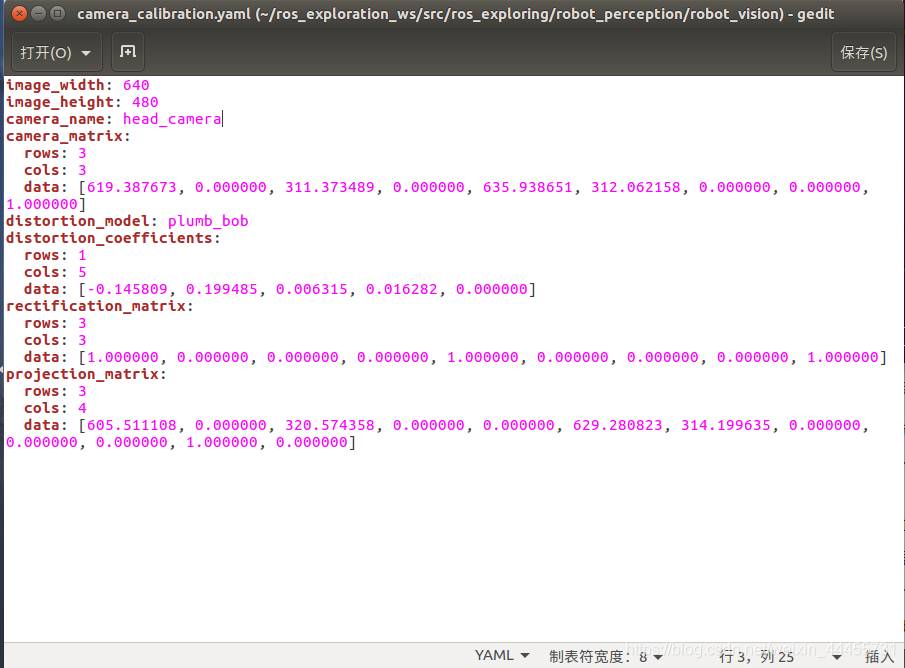
此处要修改camera_name 为 head_camera
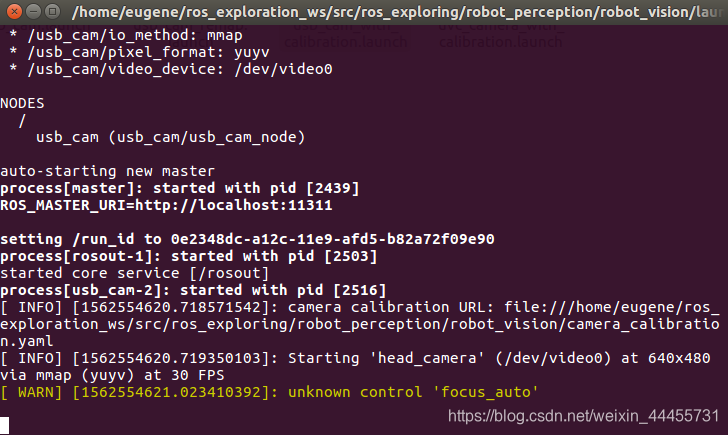
运行
roslaunch robot_vision usb_cam_with_calibration.launch
报错:
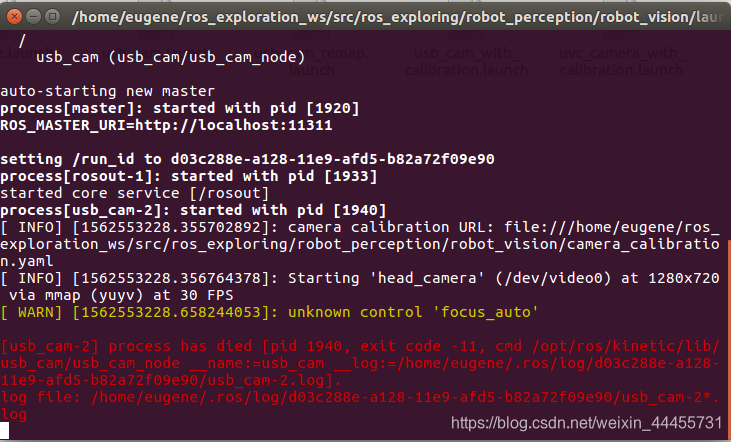
这个鸟问题困扰我好几天,各种百度google也没找到靠谱的解决办法,后来自己反复看胡大神的源代码,原来是这个鸟文件出了问题:

就是发黄的那个鸟(usb_cam_with_calibration.launch)
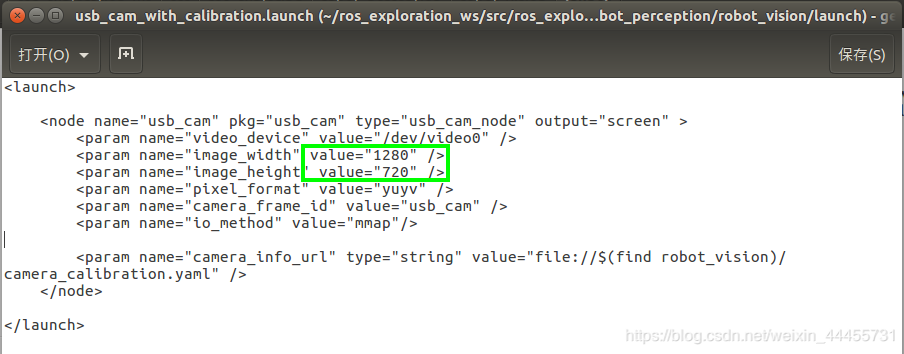
以楼主的第6感(灵不灵不知道)此处似乎存在端倪,因为usb_cam.launch文件的内容
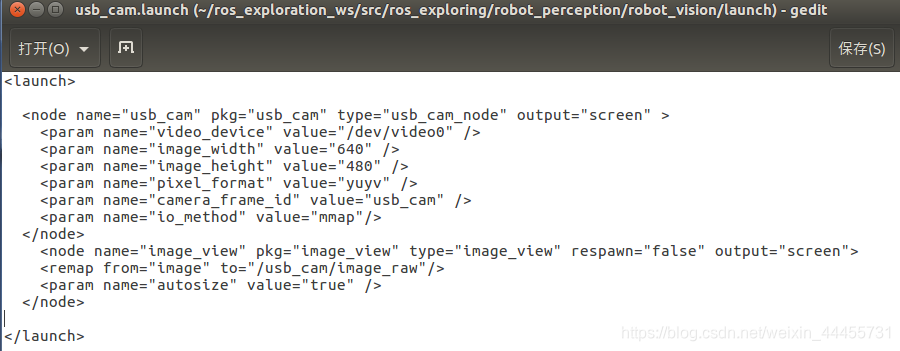
image_width和image_height的默认数值为:640 × 480 尝试将usb_cam_with_calibration.launch中这两个值也改为相同的值,
万事大吉。
版权声明:本文为weixin_44455731原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。