我们先明确一下这里所说的一些概念
IMU
IMU全称Inertial Measurement Unit,惯性测量单元,主要用来检测和测量加速度与旋转运动的传感器。起初只是用来测量角度的,后来随着其他传感器的加入,它的功能变得多样了,而很多情况下,其名称还是IMU,因此这也导致了:有的人认为IMU只能计算一些惯性力,进而获得旋转角度(加速度计);有些人发现有些叫IMU的产品还可以算偏航角(加速度计+磁力计);而更有甚者,IMU居然还能获得经纬度(加速度计+磁力计+GNSS)
1)IMU包含加速度计和磁力计
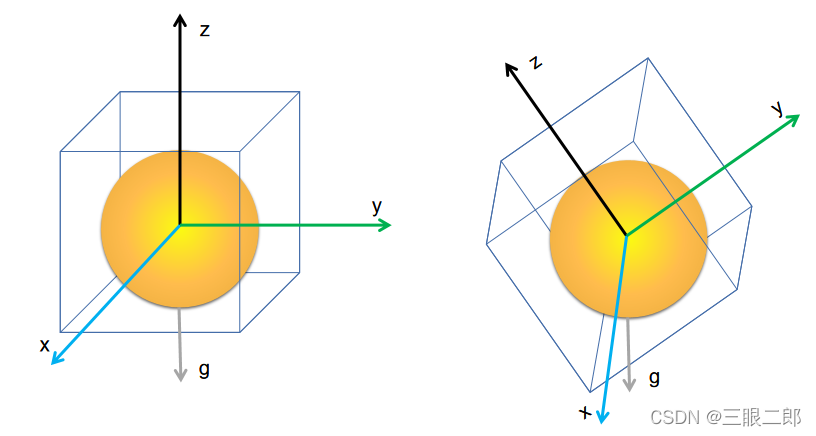
我们先设想,我们的加速度计是一个正方体,里面放置一个小球。初始状态是平方放在桌面,重力加速度g是垂直于平面的,即四周没有受力,其实我们的IMU没有绕x轴和y轴旋转。当我们绕x轴旋转后,我们会看到g被分摊到两个平面,原本不受力的垂直于y方面的平面有了一个力,原本垂直于z方面的平面由原来的受力g变为了小于g的力。
通过这些力的分析,我们就可以算出我们的倾角。
这里记住,加速度计并非是我们来计算我们运动物体的加速度,而是在物体匀速运动或者静止时,我们通过算出重力对受力平面的影响进而算出角度。
这里还要注意,偏航角定义为x轴投影到g垂直的平面后,与北方向的夹角,因此该角度和g无关,即加速度计无法获得偏航角。
俯仰角,横滚角,yaw角:来自加速度计
偏航角:磁力计
这里要注意,偏航角已经涉及了本体与地球北方向的夹角,即
如果你单纯研究机体,那么你不用偏航角,不用磁力计
如果你还需要把机体搞到大地坐标系,那么你需要偏航角
2)厂家为其集成了GNSS
GNSS(全球导航为习惯系统),可用于提供高经纬度信息
这里还涉及了一个坐标系转换的考虑
IMU坐标系的坐标原点在其质心
GNSS坐标系的坐标原点在其天线(蘑菇头)的中心位置
所以如果给IMU集成GNSS,需要将GNSS天线坐标系下获得的经纬度转换到IMU坐标系,以实现整体的统一。
旋转矩阵
首先我们先明确我们为什么要用旋转矩阵
因为旋转一个角度,它的旋转结果只有一种
但是旋转两个角度,它们的组合就会出现两种
R1R2;R2R1
如果三个角度,则会出现更多
一般情况下,三维的旋转矩阵是不满足交换律的,先绕哪个轴转,再绕哪个轴转,结果是不一样的
直接拿我们的俯仰,横滚和偏航为例,这三个角度,都是我们的机体坐标系与参考坐标系(大地坐标系)的夹角,这三个夹角都有明确的定义,和是我们自己想,我们会发现,这些角度的定义都是绕着机体坐标系定义的,而并非是参考坐标系。
俯仰:以飞机的翅膀为轴
横滚:以飞机的头为轴
偏航:飞机的航向与北方向的夹角
?????,前两个角都是以飞机为参考的,最后一个不是了???
其实这里定义的挺乱的
准确来说,我们在研究姿态时,是不应该引入偏航角的,而我们要用的是yaw角
偏航角是
左乘右乘——纯属坑人,看下面就知道了
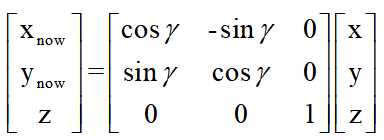
绕z旋转如上图,(x,y,z)是我们当前需要旋转的坐标系的坐标点
绕z轴旋转,z保持不变,从旋转矩阵也可以看出,它让我们的z保持不变
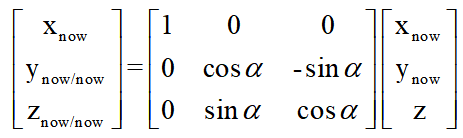
然后我们再绕xnow轴旋转,如上图,(xnow,ynow,z)是我们绕z旋转后的新坐标系下的坐标点
绕xnow轴旋转,x保持不变,从旋转矩阵也可以看出,xnow没有发生变化。
这说明了什么?乘上一个旋转矩阵,其旋转轴都是我们当前坐标系的轴。
记住,这是当前坐标系。。。。。。。。!!!!!!!!!
这样一下就通顺了,你会发现,很多公司给出的旋转矩阵都是最后再转偏航角,因为前两次旋转把当前坐标系的xy0平面转换到了与世界坐标系的XY0平面平行,这个平行成立之后,那么
偏航角直接可以绕着当前坐标系的z轴旋转了。
偏航角≠yaw
按偏航角转过来,你会发现,你的x轴指向了北
按yaw转过来,你会发现,你的x轴指向没有实际的物理意义
旋转矩阵做了什么?
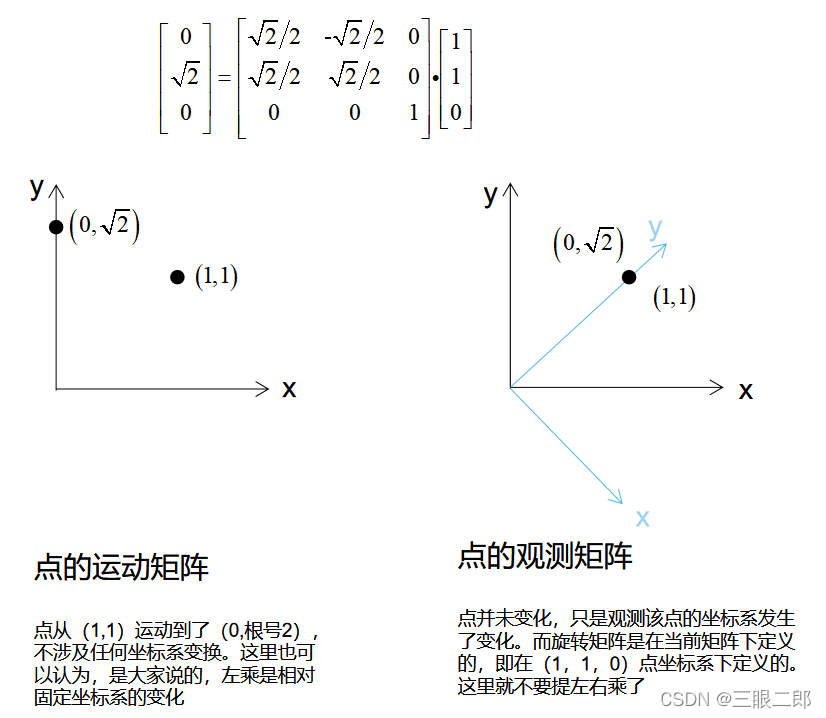
可以看到,我们的用途不同,旋转矩阵对于点的意义有所不同。
这也就是,在学习机器人运动时,我们听到的左乘为固定坐标系,右乘为变化坐标系,其实说的都是点的运动,真实的原坐标系并未发生变化,只是点动了,可能会生成新的坐标系作为新的参考,就有了右乘。
在点的观测时,我们只考虑坐标系的变化,它的变化都是绕当前坐标系转动,都是乘在左边,而并非大家说的左右乘。
这里也就好说明了,都是按照当前矩阵旋转,因此那些先转俯仰后转横滚和先转横滚后转俯仰的,两者可能结果相同,但是角度的大小肯定不一致,因此,用哪家的imu必须问清楚,其旋转矩阵怎么定义的,才能使用。
角度正负问题
正常右手坐标系,逆时针的都为正
看清商家的坐标系定义和角度定义,转换到和你自己坐标系匹配的关系,然后再求解。
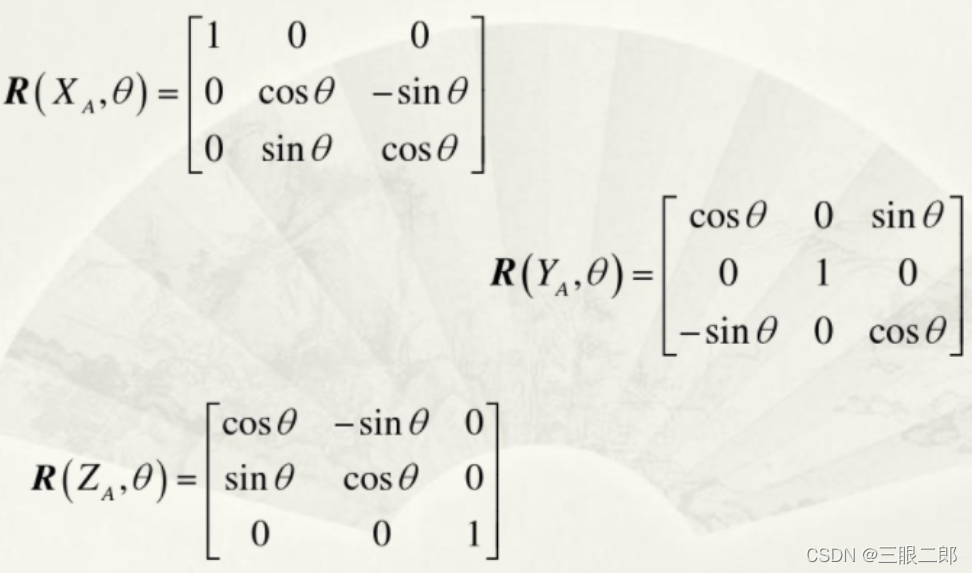
关于矩阵中是-sinθ还是+sinθ,还有必要再谈一下
1)下图这一套旋转矩阵,准确来说应该是回退旋转矩阵
绕X和Z的转动都是右上角为负值
θ的正负是按如何转过来的定义

上式从左到右为惯性坐标系到物体坐标系,做了哪些旋转

1)拿飞机为例子,平地的飞机到空中的飞机,需要如何操作。
下式可以表示为飞机先绕大地的z轴转了γ角,即飞机偏航了γ角;然后绕y轴转了β角,即飞机逆时针横滚了β角,;最后飞机绕x轴转了α角,即飞机扬起了头,扬了α角。
上式从右到左为物体坐标系回退到惯性坐标系,需要回退的步骤

这时分清楚α、β和γ,哪个是当前坐标系定义的,很显然,飞机从地面到空中最后一次用的α角,那么从空中到地面第一个就要用该角,然后转β角,最后转γ角。
这里可能会有人异或,角度不应该是负值么,回退应该是往回转的?
这里需要明白一点
坐标点的对应:
观测的点是绝对的,它对于世界来说是不动的;
点和坐标系的关系是相对的,坐标系顺时针转,点就逆时针转。
这里转坐标系是顺时针转了α,那么点就要逆时针转α,即上式的正值。