1.下载功能包

2。由于功能包是使用Python2作为运行环境的,因此记得将
import _thread as thread
改为
import thread
3。运行结点,发现报错,说是没有websocket,先安装一个pip,然后安装websocket
sudo apt install python-pip
pip install websocket4。运行结点
roslaunch rc_audio rc_tts.launch然后查看rostopic list
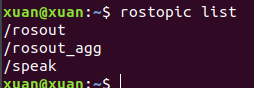
有speak 话题即可
5。安装依赖
安装mpg123播放器
sudo apt-get install mpg123
安装websocket-client包
pip install websocket-client 6。发布语音指令
rostopic pub /speak std_msgs/String "你好"
7。安装完成后,可能会报错。
(1)
ALSA lib pcm.c:2239:(snd_pcm_open_noupdate) Unknown PCM cards.pcm 类似的错误
解决方法:
a.可以使用下面的指令重启试试,记得电脑重启一下
pulseaudio -kb.更改配置文件
进入到下面文件夹中,编辑里面的daemon.conf配置文件
/etc/pulse
更改参数
; default-fragments = 5
; default-fragment-size-msec = 25(2)提示设备不对,加载不了device
首先使用下面的指令查看设备信息
aplay -l运行后如下图所示

这里的设备号是card,可以看到我这里0是显卡,1是声卡,因此,将源代码中
hw:03,00改为
hw:01,00即可
版权声明:本文为weixin_44975038原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。