通过激光器扫描得到的原始数据:
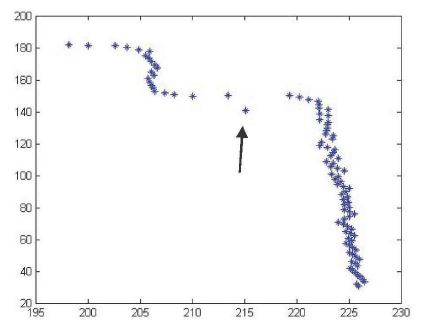
(1)通过滤波,去除杂质点
略
(2)点的直线拟合方法:K均值拟合法、最小二乘法、增量式直线拟合法、霍夫变换
K均值拟合法,需要预先知道拟合直线的数量。
最小二乘法:对联通的拐角点直接拟合,容易丢失角特征
霍夫变换:计算复杂,选票阈值设定也是难点。
增量式直线拟合法:要求采集对象按顺序排列,通过相邻点的残差拟合数据。针对本文陌生环境的激光点,残差阈值难以设定,容易丢失角特征信息。
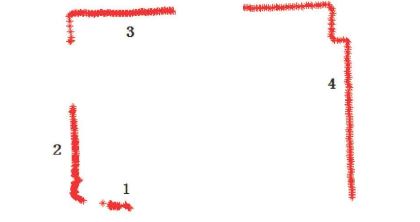
(3)阈值分割
对采集数据经行分割。
(4)角特征提取
必须先对角特征点进行提取,这样对其余点进行直线拟合,才能比较准确。
传统方法:三点预测法。
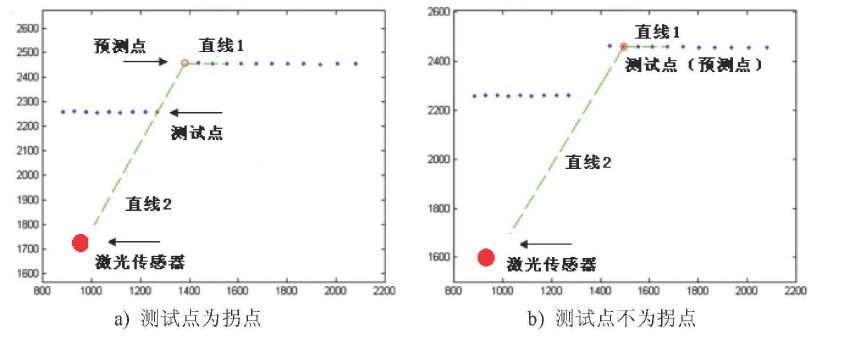
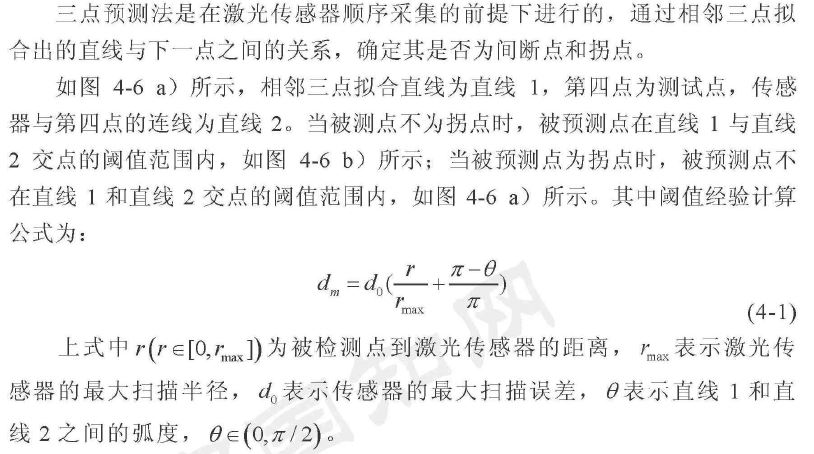
该方法适用于简单环境,实用性较差。
可参考方法:逐步二分法
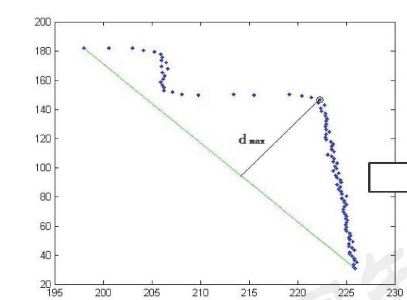
首尾点相连构成直线,计算每一个点到该直线的距离。以距离最大的点作为拐点。以此一直循环分,直至所有点到新拟合的直线的垂直距离在一定范围内。
(5)直线的拟合
最小二乘法、随机抽样一致性算法(RANSAC)等。
至此,局部地图构建完毕。
全局地图构建
To be continue……