前言
使用命令行输入代码需要不断打开终端比较繁琐,而且容易输入错误,那么有没有什么方法可以快速启动所需节点呢?
一、launch文件介绍
Launch文件:通过XML文件实现多节点的配置和启动(可自启动ROS Master)
命令行语法:
roslaunch 功能包名 launch文件名
二、Launch文件常用核心语法
<launch>
<node pkg = "turtlesim" name="sim1" type="turtlesim_node" />
<node pkg = "turtlesim" name="sim2" type="turtlesim_node" />
</launch>
| < launch > | launch文件中的根元素采用< launch >标签定义 |
|---|---|
| < node > | 启动节点 |
注:launch文件以< launch >开始,结束
1.< node >语法
<node pkg = "package-name" type = "executable-name" name= "node-name"/>
| pkg | 节点所在的功能包名称 |
|---|---|
| type | 节点的可执行文件名称(.cpp文件或.py文件) |
| name | 节点运行时的名称:可以取代type中的节点名(即覆盖掉ros::init()定义的节点名) |
| output | output=“screen” 终端输出转储在当前的控制台上,而不是在日志文件中 |
| respawn | 是否要重启 |
| required | 控制某个节点是否一定要启动 |
| ns | 设置命名空间(避免命名冲突) |
| args | 给节点输入参数 |
2.参数设置
(1)< param >/< rosparam >
< param >设置ROS系统运行中的参数,存储在参数服务其中。
<param name = "output_frame" value="odem" />
- name:参数名
- value:参数值
< rosparam > 加载参数文件中的多个参数:
<rosparam file="params.yaml" command="load" ns="params" />
其中,ns是命名空间(name space)
(2)< arg >
< arg > launch文件内部的局部变量,仅限于launch文件使用
设置参数
<arg name="arg-name" value="arg-value" />
- name:参数名
- value:参数值
参数调用:
<param name="foo" value="$(arg arg-name)" />
<node name="node" pkg="package" type="type" args="$(arg arg-name)" />
3.重映射
< remap >重映射ROS计算机资源的命名
<remap from="/turtlebot/cmd_vel" to="/cmd_vel"/>
- from:原命名
- to:映射之后的命名
4.嵌套
< include >内嵌包含其他launch文件,类似C语言中的头文件包含。
<include file="$(dirname)/other.launch" />
- file:包含其他launch文件路径
三、launch案例
1. 创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_launch
cd learning_launch
mkdir launch
注:launch功能包不需要依赖包
2.simple.launch
cd ~/catkin_ws/src/learning_launch/launch
touch simple.launch
gedit simple.launch
<launch>
<node pkg="learning_topic" type="person_subscriber" name="talker" output="screen" />
<node pkg="learning_topic" type="person_publisher" name="listener" output="screen" />
</launch>
注:启动的节点所在功能包和可执行文件(.cpp文件)的创建请参考:ROS学习(四)–1.发布者与订阅者案例
编译:
cd ~/catkin_ws
catkin_make
运行:
source ~/catkin_ws/devel/setup.bash
roslaunch learning_launch simple.launch
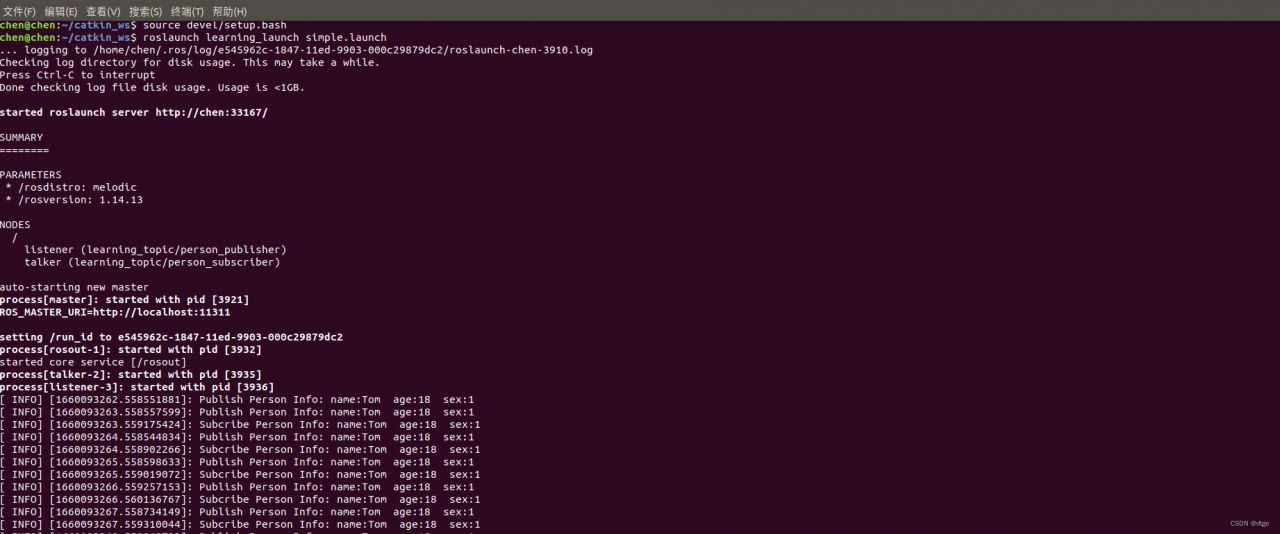
由图可知,launch启动节点成功!
3.turtlesim_parameter_config.launch
cd ~/catkin_ws/src/learning_launch/launch
touch turtlesim_parameter_config.launch
gedit turtlesim_parameter_config.launch
<launch>
<param name="/turtle_number" value="2" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node" >
<param name="turtle_name1" value="Tom" />
<param name="turtle_name2" value="Jerry" />
<rosparam file="$(find learning_launch)/config/param.yaml" command="load" />
</node>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" output="screen" />
</launch>
注:1.find learning_launch:自动寻找learning_launch路径
编译:
cd ~/catkin_ws
catkin_make
注:运行前需要先添加config/param.yaml文件
cd ~/catkin_ws/src/learning_launch
mkdir config
cd config
touch param.yaml
gedit param.yaml
A: 123
B: "hello"
group:
C: 456
D: "hello"
运行:
source ~/catkin_ws/devel/setup.bash
roslaunch learning_launch turtlesim_parameter_config.launch
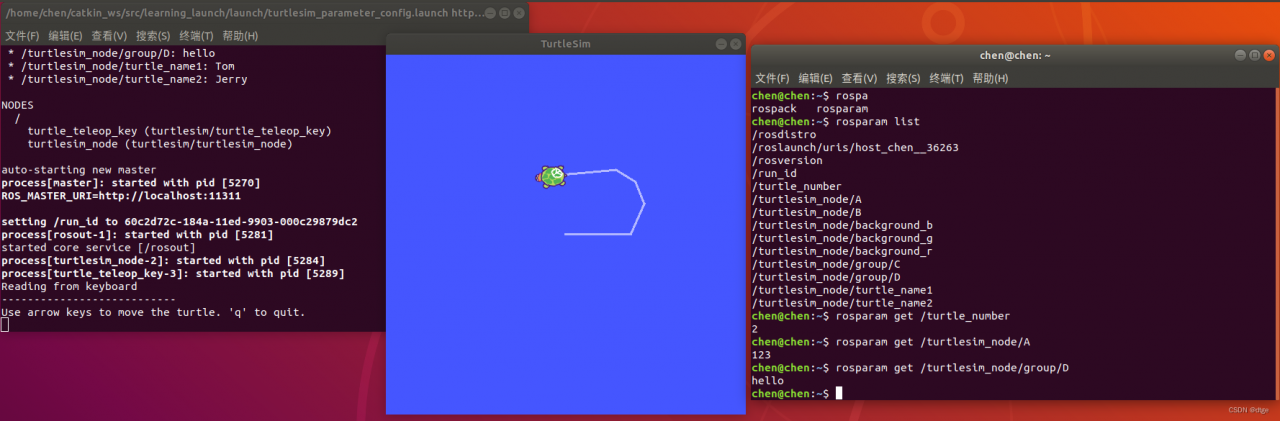
由图可知,launch文件启动海龟仿真器和海龟移动控制器成功。同时launch文件参数设置和加载param.yaml文件参数成功
4.start_tf_demo_c++.launch
cd ~/catkin_ws/src/learning_launch/launch
touch start_tf_demo_c++.launch
gedit start_tf_demo_c++.launch
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="sim" />
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen" />
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener" name="listener" />
</launch>
注:启动的节点所在功能包和可执行文件(.cpp文件)的创建请参考:ROS学习(七)坐标系管理系统
编译:
cd ~/catkin_ws
catkin_make
运行:
source ~/catkin_ws/devel/setup.bash
roslaunch learning_launch start_tf_demo_c++.launch
5.turtlesim_remap.launch
cd ~/catkin_ws/src/learning_launch/launch
touch turtlesim_remap.launch
gedit turtlesim_remap.launch
<launch>
<include file="$(find learning_launch)/launch/simple.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<remap from="/turtle1/cmd_vel" to="/cmd_vel" />
</node>
</launch>
编译:
cd ~/catkin_ws
catkin_make
运行:
source ~/catkin_ws/devel/setup.bash
roslaunch learning_launch turtlesim_remap.launch
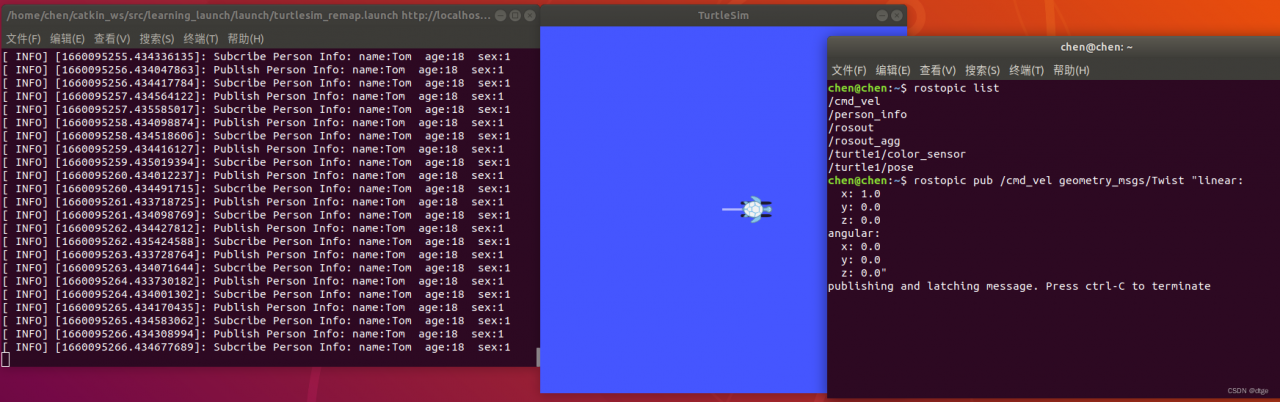
由图可知,simple.launch文件包含成功,同时remap重命名成功,成功将”/turtle1/cmd_vel”重命名为”/cmd_vel” ,向”/cmd_vel” 发布话题,海龟成功移动,说明重命名成功
版权声明:本文为m0_56451176原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。