前言
在最近的电机项目中,有遇到有传感器数据并不线性的问题,然后想要用最小二乘法做个曲线拟合,反过来去校准不线性的传感器的数据,因此记录一下使用最小二乘法来拟合多项式的曲线的步骤。本篇从最小二乘法的原始公式入手编写M文件,目的是方便使用单片机实现,或者说是方便用C来实现。
拟合一次函数:
我们先试着拟合一个简单一点的,从一元一次函数开始。最小二乘法拟合曲线需要首先知道曲线的通用公式。一次函数的通用公式为y = k * x + b,使用matlab编写很容易实现。这里我直接写入了几个点,随便编了一组数据。

%*************************************************************************%
%最小二乘法
%**********************************************************************%
clc;
clear;
%假定拟合曲线的公式为:y = ax^2 +b^x + c;
x = [1 2 3 4 5 6 7 8 9];
y = [1.2 2.5 3.6 4.8 5.6 7.4 8.0 9.8 12.0];
[m , n] = size(x);
sumx = 0;
sumy = 0;
sumxx = 0;
sumxy = 0;
Xaver = 0;
Yaver = 0;
XYaver = 0;
XXaver = 0;
%求平均
for i = 1 : n
sumx = sumx + x(i);
sumy = sumy + y(i);
sumxy = sumxy + x(i) * y(i);
sumxx = sumxx + x(i) * x(i);
end
Xaver = sumx / n;
Yaver = sumy / n;
XYaver = sumxy / n;
XXaver = sumxx / n;
k = (XYaver - Xaver * Yaver) / (XXaver - Xaver * Xaver);
b = Yaver - k * Xaver;
plot(x,y,'s'); %画数据点不连线
hold on; %不加此句,两个图形将显示在两张图像上
%画出拟合曲线
x1 = [0 : 0.1 : 10];
y1 = k * x1 + b;
plot(x1,y1);效果:

拟合二次函数:
之后开始拟合二次函数,可以从最小二乘法的原理上进行程序编写。
最小二乘法原理:
假设我们的多项式表达式为:

之后采集x与y的样本数据:
x = [1 2 3 4 5 6 7 8 9 10 11 12 13];
y = [1.2 2.5 3.6 4.8 5.6 6.6 7.4 8.0 9.8 12.0 12.5 13.1 14.6];最小二乘法是要达到最优函数的各项系数使的误差平方和S取得最小值,即S对各项式的偏导为0:

整理上式可得:
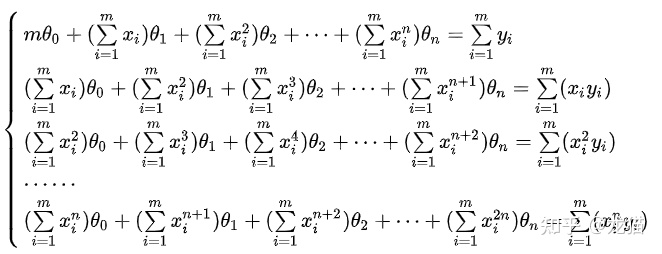
将其转化为矩阵形式:
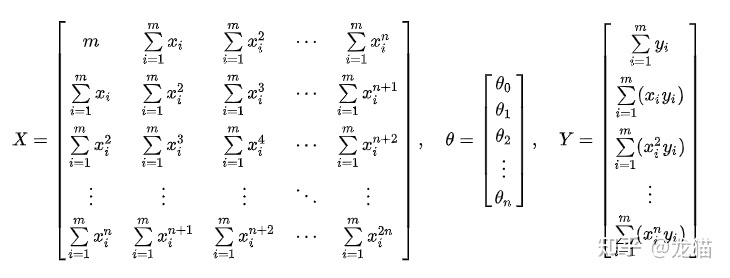
即,我们需要求取样本x的和,x^2的和,,,,,x^n的加和,以及y的加和,xy的加和。。。。。x^n*y的加和。
假定我们的曲线是二次多项式,那么这个XY矩阵都是一个3行3列的矩阵,那么只需要求到x^4的加和即可,程序如下:
sumx = 0;
sumxx = 0;
sumxxx = 0;
sumxxxx = 0;
sumy = 0;
sumxy = 0;
sumxxy = 0;
%求矩阵数据
for i = 1 : n
sumx = sumx + x(i);
sumxx = sumxx + x(i) * x(i);
sumxxx = sumxxx + x(i) * x(i) * x(i);
sumxxxx = sumxxxx + x(i) * x(i) * x(i) * x(i);
sumy = sumy + y(i);
sumxy = sumxy + x(i) * y(i);
sumxxy = sumxxy + x(i) * x(i) * y(i);
end将x加和的相关项写成X矩阵,将y加和的相关项写成Y矩阵,之后:

多项式矩阵就可以通过X矩阵的逆 * Y矩阵求得:
%写出矩阵
U = [n sumx sumxx ; sumx sumxx sumxxx ; sumxx sumxxx sumxxxx];
W = [sumy ; sumxy ; sumxxy];
%求出矩阵的逆,进而求出多项式矩阵
V = pinv(U) * W; % U * V = W V = U(-1) * W
a = V(1,1); b = V(2,1); c = V(3,1);之后就可以画出图形:
%画出拟合曲线
x1 = [0 : 0.1 : 15];
y1 = a + b .* x1 + c .* x1 .* x1;
plot(x1,y1);
注意:有一个点乘
结果图像如下:

完整代码如下:
%*************************************************************************%
%最小二乘法拟合多项式
%**********************************************************************%
clc;
clear;
%假定拟合曲线的公式为:y = a +b^x + c * x^2;
x = [1 2 3 4 5 6 7 8 9 10 11 12 13];
y = [1.2 2.5 3.6 4.8 5.6 6.6 7.4 8.0 9.8 12.0 12.5 13.1 14.6];
[m , n] = size(x);
a = 0;
b = 0;
c = 0;
sumx = 0;
sumxx = 0;
sumxxx = 0;
sumxxxx = 0;
sumy = 0;
sumxy = 0;
sumxxy = 0;
%求矩阵数据
for i = 1 : n
sumx = sumx + x(i);
sumxx = sumxx + x(i) * x(i);
sumxxx = sumxxx + x(i) * x(i) * x(i);
sumxxxx = sumxxxx + x(i) * x(i) * x(i) * x(i);
sumy = sumy + y(i);
sumxy = sumxy + x(i) * y(i);
sumxxy = sumxxy + x(i) * x(i) * y(i);
end
%写出矩阵
U = [n sumx sumxx ; sumx sumxx sumxxx ; sumxx sumxxx sumxxxx];
W = [sumy ; sumxy ; sumxxy];
%求出矩阵的逆,进而求出多项式矩阵
V = pinv(U) * W; % U * V = W V = U(-1) * W
a = V(1,1); b = V(2,1); c = V(3,1);
plot(x,y,'s'); %画数据点不连线
hold on; %不加此句,两个图形将显示在两张图像上
%画出拟合曲线
x1 = [0 : 0.1 : 15];
y1 = a + b .* x1 + c .* x1 .* x1;
plot(x1,y1);
拟合多项式:
拟合多项式其实与拟合二次函数的方法是一样的,因为都是通用的矩阵。那就用一个4阶的举例,如果是4阶,那么拟合出来的多项式就是3次多项式。这里我们先随便编一个4次多项式,生成一个4次多项式的点:
for i = 1 : n
y(i) = 0.3 + 0.04 * x(i) + 1.2 * x(i) * x(i) + 0.06 * x(i) * x(i) * x(i) + 0.003 * x(i) * x(i) * x(i) * x(i);
end这里的y就是4次多项式了,生成了点之后,我们使用最小二乘法来拟合一个3次多项式,尽量与4次多项式的点接近。依旧是按照最小二乘法的矩阵公式,先求出需要的加和数据:
%求矩阵数据
for i = 1 : n
sumx = sumx + x(i);
sumxx = sumxx + x(i) * x(i);
sumxxx = sumxxx + x(i) * x(i) * x(i);
sumxxxx = sumxxxx + x(i) * x(i) * x(i) * x(i);
sumxxxxx = sumxxxxx + x(i) * x(i) * x(i) * x(i) * x(i);
sumxxxxxx = sumxxxxxx + x(i) * x(i) * x(i) * x(i) * x(i) * x(i);
sumy = sumy + y(i);
sumxy = sumxy + x(i) * y(i);
sumxxy = sumxxy + x(i) * x(i) * y(i);
sumxxxy = sumxxxy + x(i) * x(i) * x(i) * y(i);
sumxxxxy = sumxxxxy + x(i) * x(i) * x(i) * x(i) * y(i);
end然后写出矩阵:
%写出矩阵
U = [n sumx sumxx sumxxx;
sumx sumxx sumxxx sumxxxx;
sumxx sumxxx sumxxxx sumxxxxx;
sumxxx sumxxxx sumxxxxx sumxxxxxx];
W = [sumy ; sumxy ; sumxxy; sumxxxy];求出逆矩阵之后求多项式:
%求出矩阵的逆,进而求出多项式矩阵
V = pinv(U) * W; % U * V = W V = U(-1) * W
a = V(1,1); b = V(2,1); c = V(3,1);d = V(4,1);之后将图像画出来,对比之前生成的点的图像:
plot(x,y,'s'); %画数据点不连线
hold on; %不加此句,两个图形将显示在两张图像上
%画出拟合曲线
x1 = [0 : 0.1 : 40];
y1 = a + b .* x1 + c .* x1 .* x1 + d .* x1 .* x1 .* x1;
plot(x1,y1);
