1、安装标定功能包
sudo apt-get install ros-melodic-camera-calibration
2、打开摄像机,启动标定节点
rosrun camera_calibration cameracalibrator.py --size 8x5 --square 0.028 image:=/usb_cam/image_raw camera:=/usb_cam
size:棋盘内角点的个数,行*列
square:一个格子的边长,单位是m
image:摄像头发布的图像话题明
camera:相机名
3、点击calibrate按钮计算标定参数,标定结束后输出标定参数
[image]
width
640
height
480
[narrow_stereo]
camera matrix
496.458369 0.000000 321.704479
0.000000 498.045492 245.523491
0.000000 0.000000 1.000000
distortion
0.156540 -0.184929 0.004541 0.004684 0.000000
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection
513.121582 0.000000 324.144520 0.000000
0.000000 515.390259 246.954678 0.000000
0.000000 0.000000 1.000000 0.000000
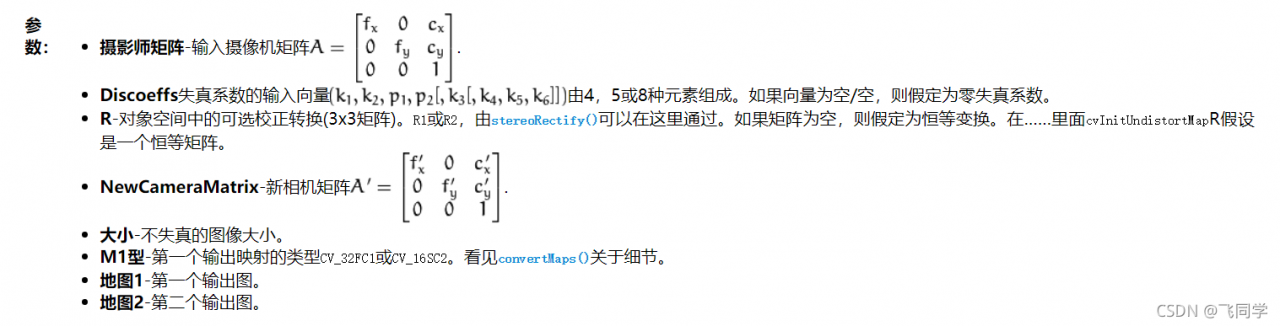
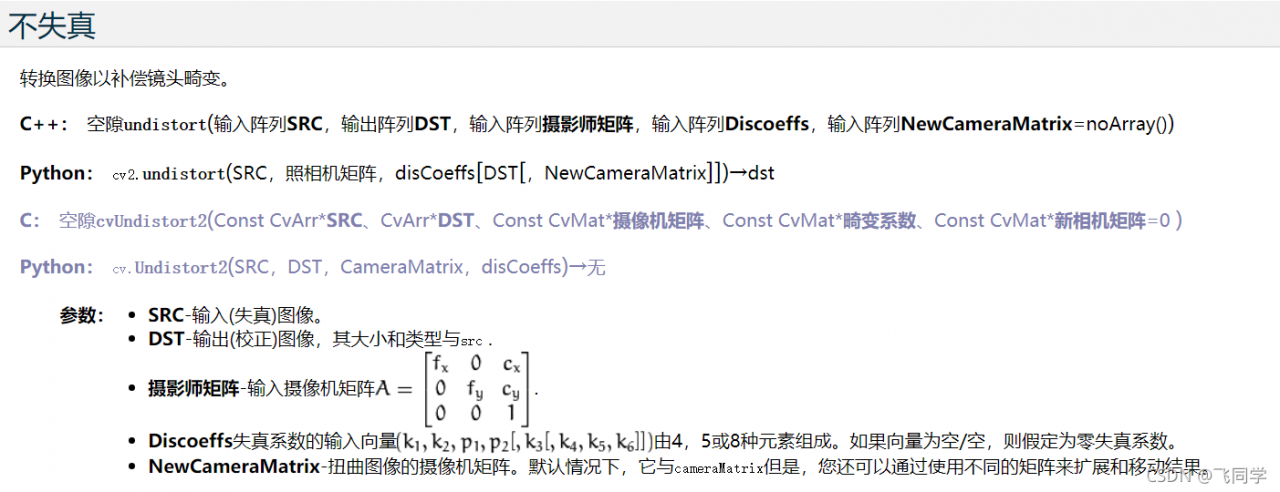
4、内参矩阵和畸变参数解释 http://blog.csdn.net/wangshuailpp/article/details/52953323
5、点击save 按钮保存标定数据,在/tmp目录下会得到一个压缩包,包含标定用的图像和标定参数ost.yaml ost.txt
版权声明:本文为z1872385原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。