之前博文《
ROS学习笔记之——Navigation Stack
》已经学习过了ROS中的导航包了,本博文来学习一下amcl定位与gmapping
目录
概述
在导航中,不可缺少的便是地图与定位。需要知道机器人当前的位置坐标(定位),然后根据已经建立好的地图,通过路径规划来规划出合理的路径

gmapping 建图
gmapping的作用是根据激光雷达和里程计(Odometry)的信息,对环境地图进行构建,并且对自身状态进行估计。因此它得输入应当包括激光雷达和里程计的数据,而输出应当有自身位置和地图。
源码的地址:
https://github.com/ros-perception/slam_gmapping
gmapping是一个比较完善的地图构建开源包,使用激光和里程计的数据来生成二维地图。
要采用gmapping需要机器人拥有odometry数据以及laser range-finder。slam_gmapping节点会尝试将输入的激光雷达扫描的数据转换到odom frame下。
slam_gmapping采用sensor_msgs/LaserScan Message(
http://docs.ros.org/en/api/sensor_msgs/html/msg/LaserScan.html
)来构建地图并且发布nav_msgs/OccupancyGrid Message出来(
http://docs.ros.org/en/api/nav_msgs/html/msg/OccupancyGrid.html
)
注意在地图消息中,存在了原点的pose,包括了位置与方向

订阅话题
1、tf message (
http://docs.ros.org/en/api/tf/html/msg/tfMessage.html
)目的是为了实现laser,base,odometry之间的变换
<the frame attached to incoming scans> → base_link
usually a fixed value, broadcast periodically by a
robot_state_publisher
, or a tf
static_transform_publisher
.
base_link → odom
usually provided by the odometry system (e.g., the driver for the mobile base)
/tf
以及
/tf_static
: 坐标变换,类型为第一代的
tf/tfMessage
或第二代的
tf2_msgs/TFMessage
其中一定得提供的有两个tf,一个是
base_frame
与
laser_frame
之间的tf,即机器人底盘和激光雷达之间的变换;一个是
base_frame
与
odom_frame
之间的tf,即底盘和里程计原点之间的坐标变换。
odom_frame
可以理解为里程计原点所在的坐标系。
2、sensor_msgs/LaserScan Message(
http://docs.ros.org/en/api/sensor_msgs/html/msg/LaserScan.html
)激光雷达数据,类型为
sensor_msgs/LaserScan
/scan
很好理解,Gmapping SLAM所必须的激光雷达数据,而
/tf
是一个比较容易忽视的细节。尽管
/tf
这个Topic听起来很简单,但它维护了整个ROS三维世界里的转换关系,而
slam_gmapping
要从中读取的数据是
base_frame
与
laser_frame
之间的tf,只有这样才能够把周围障碍物变换到机器人坐标系下,更重要的是
base_frame
与
odom_frame
之间的tf,这个tf反映了里程计(电机的光电码盘、视觉里程计、IMU)的监测数据,也就是机器人里程计测得走了多少距离,它会把这段变换发布到
odom_frame
和
laser_frame
之间。
因此
slam_gmapping
会从
/tf
中获得机器人里程计的数据。
发布话题
1、nav_msgs/MapMetaData Message (
http://docs.ros.org/en/api/nav_msgs/html/msg/MapMetaData.html
)这是map_metadata,
2、nav_msgs/OccupancyGrid Message(
http://docs.ros.org/en/api/nav_msgs/html/msg/OccupancyGrid.html
)这是map。感觉跟1的区别是,真在发布的消息,是这个,因为里面还包含了header之类了,除了header外,还有nav_msgs/MapMetaData,就是1了~
3、~entropy (std_msgs/Float64)(
http://docs.ros.org/en/api/std_msgs/html/msg/Float64.html
)这个是代表了机器人位姿分布的不确定性。
在之前博客《
ROS学习笔记之——激光雷达SLAM建图
》中也谈到了,通过运行下面命令即可实现slam建图
roslaunch turtlebot3_slam turtlebot3_slam.launch那么具体地,我们来看看这个launch文件的组成(/home/kwanwaipang/catkin_ws/src/turtlebot3/turtlebot3_slam/launch/turtlebot3_slam.launch)
<launch>
<!-- Arguments -->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="slam_methods" default="gmapping" doc="slam type [gmapping, cartographer, hector, karto, frontier_exploration]"/>
<arg name="configuration_basename" default="turtlebot3_lds_2d.lua"/>
<arg name="open_rviz" default="true"/>
<!-- TurtleBot3 -->
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_remote.launch">
<arg name="model" value="$(arg model)" />
</include>
<!-- SLAM: Gmapping, Cartographer, Hector, Karto, Frontier_exploration, RTAB-Map -->
<include file="$(find turtlebot3_slam)/launch/turtlebot3_$(arg slam_methods).launch">
<arg name="model" value="$(arg model)"/>
<arg name="configuration_basename" value="$(arg configuration_basename)"/>
</include>
<!-- rviz -->
<group if="$(arg open_rviz)">
<node pkg="rviz" type="rviz" name="rviz" required="true"
args="-d $(find turtlebot3_slam)/rviz/turtlebot3_$(arg slam_methods).rviz"/>
</group>
</launch>然后再看看gmapping.launch
<launch>
<!-- Arguments -->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="configuration_basename" default="turtlebot3_lds_2d.lua"/>
<arg name="set_base_frame" default="base_footprint"/>
<arg name="set_odom_frame" default="odom"/>
<arg name="set_map_frame" default="map"/>
<!-- Gmapping -->
<node pkg="gmapping" type="slam_gmapping" name="turtlebot3_slam_gmapping" output="screen">
<param name="base_frame" value="$(arg set_base_frame)"/>
<param name="odom_frame" value="$(arg set_odom_frame)"/>
<param name="map_frame" value="$(arg set_map_frame)"/>
<param name="map_update_interval" value="2.0"/>
<param name="maxUrange" value="3.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="50"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.2"/>
<param name="temporalUpdate" value="0.5"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="100"/>
<param name="xmin" value="-10.0"/>
<param name="ymin" value="-10.0"/>
<param name="xmax" value="10.0"/>
<param name="ymax" value="10.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
</launch>
仿真看看
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_gazebo turtlebot3_world.launch再运行
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_slam turtlebot3_slam.launch然后查看rqt_graph
可以看到此处有两个tf的数据

查看现有的topic
/camera/depth/camera_info
/camera/depth/image_raw
/camera/depth/points
/camera/parameter_descriptions
/camera/parameter_updates
/camera/rgb/camera_info
/camera/rgb/image_raw
/camera/rgb/image_raw/compressed
/camera/rgb/image_raw/compressed/parameter_descriptions
/camera/rgb/image_raw/compressed/parameter_updates
/camera/rgb/image_raw/compressedDepth
/camera/rgb/image_raw/compressedDepth/parameter_descriptions
/camera/rgb/image_raw/compressedDepth/parameter_updates
/camera/rgb/image_raw/theora
/camera/rgb/image_raw/theora/parameter_descriptions
/camera/rgb/image_raw/theora/parameter_updates
/clicked_point
/clock
/cmd_vel
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/imu
/initialpose
/joint_states
/map
/map_metadata
/map_updates
/move_base_simple/goal
/odom
/rosout
/rosout_agg
/scan
/statistics
/tb_0/cmd_vel
/tb_1/cmd_vel
/tb_2/cmd_vel
/tf
/tf_static
/turtlebot3_slam_gmapping/entropy查看节点
rosnode info /turtlebot3_slam_gmapping
Node [/turtlebot3_slam_gmapping]
Publications:
* /map [nav_msgs/OccupancyGrid]
* /map_metadata [nav_msgs/MapMetaData]
* /rosout [rosgraph_msgs/Log]
* /tf [tf2_msgs/TFMessage]
* /turtlebot3_slam_gmapping/entropy [std_msgs/Float64]
Subscriptions:
* /clock [rosgraph_msgs/Clock]
* /scan [sensor_msgs/LaserScan]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Services:
* /dynamic_map
* /turtlebot3_slam_gmapping/get_loggers
* /turtlebot3_slam_gmapping/set_logger_level
contacting node http://10.79.138.249:35249/ ...
Pid: 4690
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (58405 - 10.79.138.249:34112) [19]
* transport: TCPROS
* topic: /tf
* to: /turtlebot3_slam_gmapping
* direction: outbound
* transport: INTRAPROCESS
* topic: /tf
* to: /rviz
* direction: outbound (58405 - 10.79.138.249:34136) [10]
* transport: TCPROS
* topic: /map
* to: /rviz
* direction: outbound (58405 - 10.79.138.249:34140) [11]
* transport: TCPROS
* topic: /clock
* to: /gazebo (http://10.79.138.249:42589/)
* direction: inbound (51256 - 10.79.138.249:49873) [20]
* transport: TCPROS
* topic: /tf
* to: /turtlebot3_slam_gmapping (http://10.79.138.249:35249/)
* direction: inbound
* transport: INTRAPROCESS
* topic: /tf
* to: /gazebo (http://10.79.138.249:42589/)
* direction: inbound (51262 - 10.79.138.249:49873) [21]
* transport: TCPROS
* topic: /tf
* to: /robot_state_publisher (http://10.79.138.249:40355/)
* direction: inbound (40938 - 10.79.138.249:37293) [22]
* transport: TCPROS
* topic: /tf_static
* to: /robot_state_publisher (http://10.79.138.249:40355/)
* direction: inbound (40940 - 10.79.138.249:37293) [23]
* transport: TCPROS
* topic: /scan
* to: /gazebo (http://10.79.138.249:42589/)
* direction: inbound (51270 - 10.79.138.249:49873) [24]
* transport: TCPROS对于关键的实现点,建议查看gmapping代码
里程计误差及修正
目前ROS中常用的里程计广义上包括车轮上的光电码盘、惯性导航元件(IMU)、视觉里程计,你可以只用其中的一个作为odom,也可以选择多个进行数据融合,融合结果作为odom。通常来说,实际ROS项目中的里程计会发布两个Topic:
-
/odom
: 类型为
nav_msgs/Odometry
,反映里程计估测的机器人位置、方向、线速度、角速度信息。 -
/tf
: 主要是输出
odom_frame
和
base_frame
之间的tf。这段tf反映了机器人的位置和方向变换,数值与
/odom
中的相同。
由于以上三种里程计都是对机器人的位姿进行估计,存在着累计误差,因此当运动时间较长时,
odom_frame
和
base_frame
之间变换的真实值与估计值的误差会越来越大。你可能会想,能否用激光雷达数据来修正
odom_frame
和
base_frame
的tf。事实上gmapping不是这么做的,里程计估计的是多少,
odom_frame
和
base_frame
的tf就显示多少,永远不会去修正这段tf。gmapping的做法是把里程计误差的修正发布到
map_frame
和
odom_frame
之间的tf上,也就是把误差补偿在了地图坐标系和里程计原点坐标系之间。通过这种方式来修正定位。(而关于gmapping中如何修正里程计的误差,则需要更多深入的查看代码了~)
这样
map_frame
和
base_frame
,甚至和
laser_frame
之间就连通了,实现了机器人在地图上的定位。
TF消息
格式规范
在上面的描述中,存在一个很关键的点,就是tf消息。在每个frame之间都会有broadcaster来发布消息维系坐标转换。这个消息TransformStampde.msg,它就是处理两个frame之间一小段tf的数据格式.
TransformStamped.msg的格式规范如下:
std_mags/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
flaot64 z
float64 w
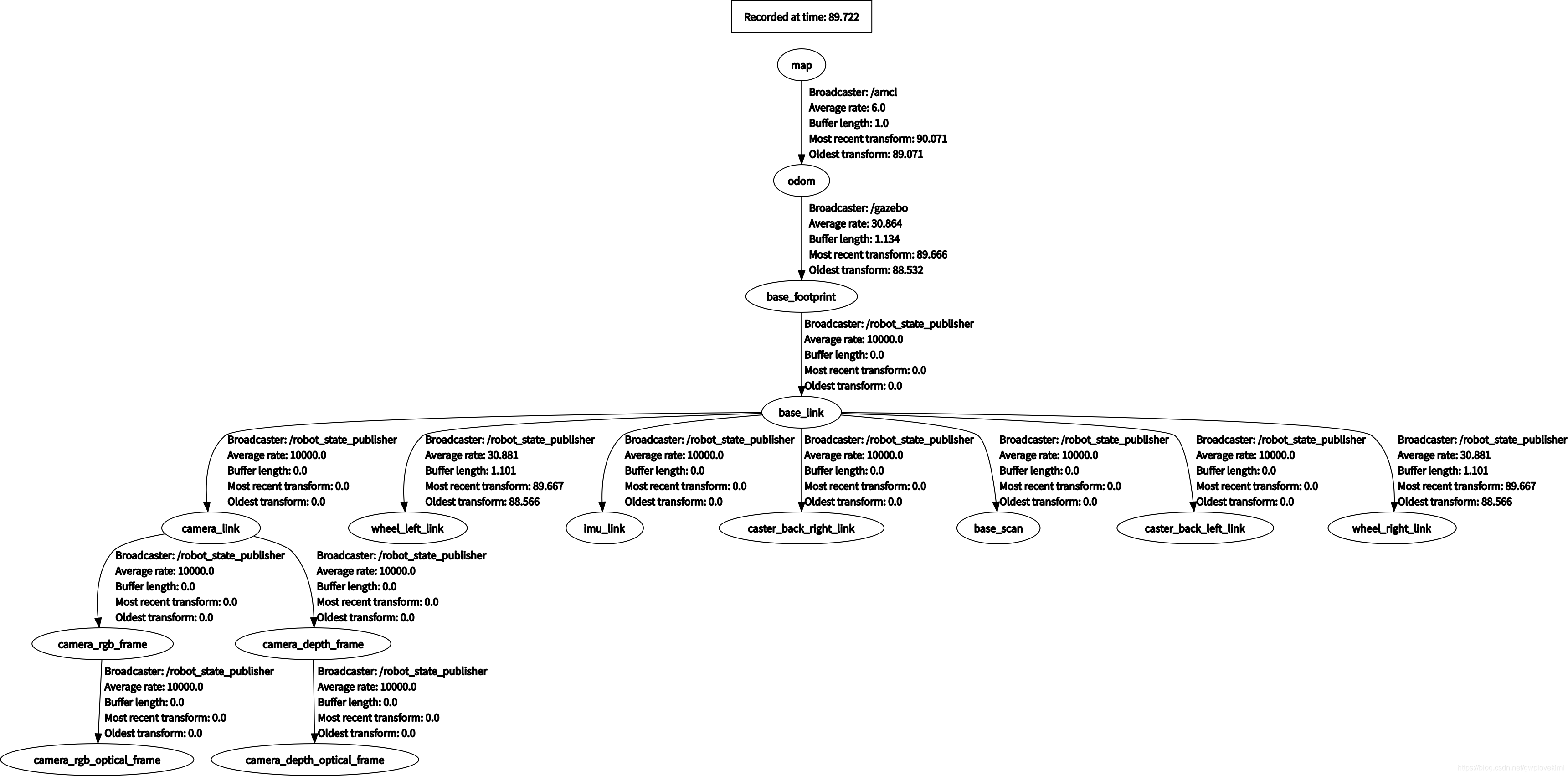
由上可见,header定义了序号,时间以及frame的名称.接着还写了child_frame,这两个frame之间要做那种变换就是由geometry_msgs/Transform来定义.
Vector3三维向量表示平移,Quaternion四元数表示旋转.像下图TF树中的两个frame之间的消息,就是由这种格式来定义的.odom就是frame_id,baselink_footprint就是child_frame_id.我们知道,一个topic上面,可能会有很多个node向上面发送消息。如图所示,不仅有我们看到的frame发送坐标变换个tf,还有别的frame也在同样的向它发送消息。最终,许多的TransformStamped.msg发向tf,形成了TF树。
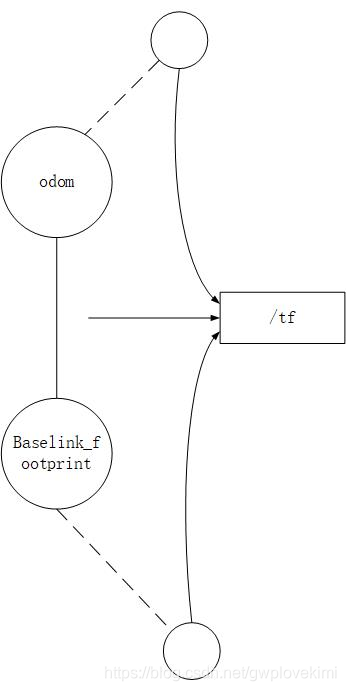
故此gmapping中的odom的数据就是发布在了odom frame上,其对应着map frame,相对map frame的变换
TF树的数据类型
上面我们讲了,TF tree是由很多的frame之间TF拼接而成。那么TF tree是什么类型呢?如下:
- tf/tfMessage.msg
- tf2_msgs/TFMessage.msg
这里TF的数据类型有两个,主要的原因是版本的迭代。自ROS Hydro以来,tf第一代已被“弃用”,转而支持tf2。tf2相比tf更加简单高效。此外也添加了一些新的功能。
由于tf2是一个重大的变化,tf API一直保持现有的形式。由于tf2具有tf特性的超集和一部分依赖关系,所以tf实现已经被移除,并被引用到tf2下。这意味着所有用户都将与tf2兼容。官网建议新工作直接使用tf2,因为它有一个更清洁的界面,和更好的使用体验。
如何查看自己使用的TF是哪一个版本,使用命令
rostopic info /tf
即可。(其实通过上面看slam_gmapping的节点可以知道我们采用是tf2)
tf/tfMessage.msg或tf2_msgs/TFMessage标准格式规范如下:
geometry_msgs/TransformStamped[] transforms
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
flaot64 z
float64 w
一个TransformStamped数组就是一个TF tree。
amcl定位
源代码:
https://github.com/ros-planning/navigation/tree/noetic-devel/amcl
amcl的英文全称是adaptive Monte Carlo localization,其实就是蒙特卡洛定位方法的一种升级版。而mcl(蒙特卡洛定位)法使用的是粒子滤波的方法来进行定位的。而粒子滤波很粗浅的说就是一开始在地图空间很均匀的撒一把粒子,然后通过获取机器人的motion来移动粒子,比如机器人向前移动了一米,所有的粒子也就向前移动一米,不管现在这个粒子的位置对不对。使用每个粒子所处位置模拟一个传感器信息跟观察到的传感器信息(一般是激光)作对比,从而赋给每个粒子一个概率。之后根据生成的概率来重新生成粒子,概率越高的生成的概率越大。这样的迭代之后,所有的粒子会慢慢地收敛到一起,机器人的确切位置也就被推算出来了。
amcl包将基于laser的地图,laser scans,transform消息,作为输入,输出预测的pose
上面gmapping运行完后,保存了地图,即可通过下面的命令来运行
export TURTLEBOT3_MODEL=waffle
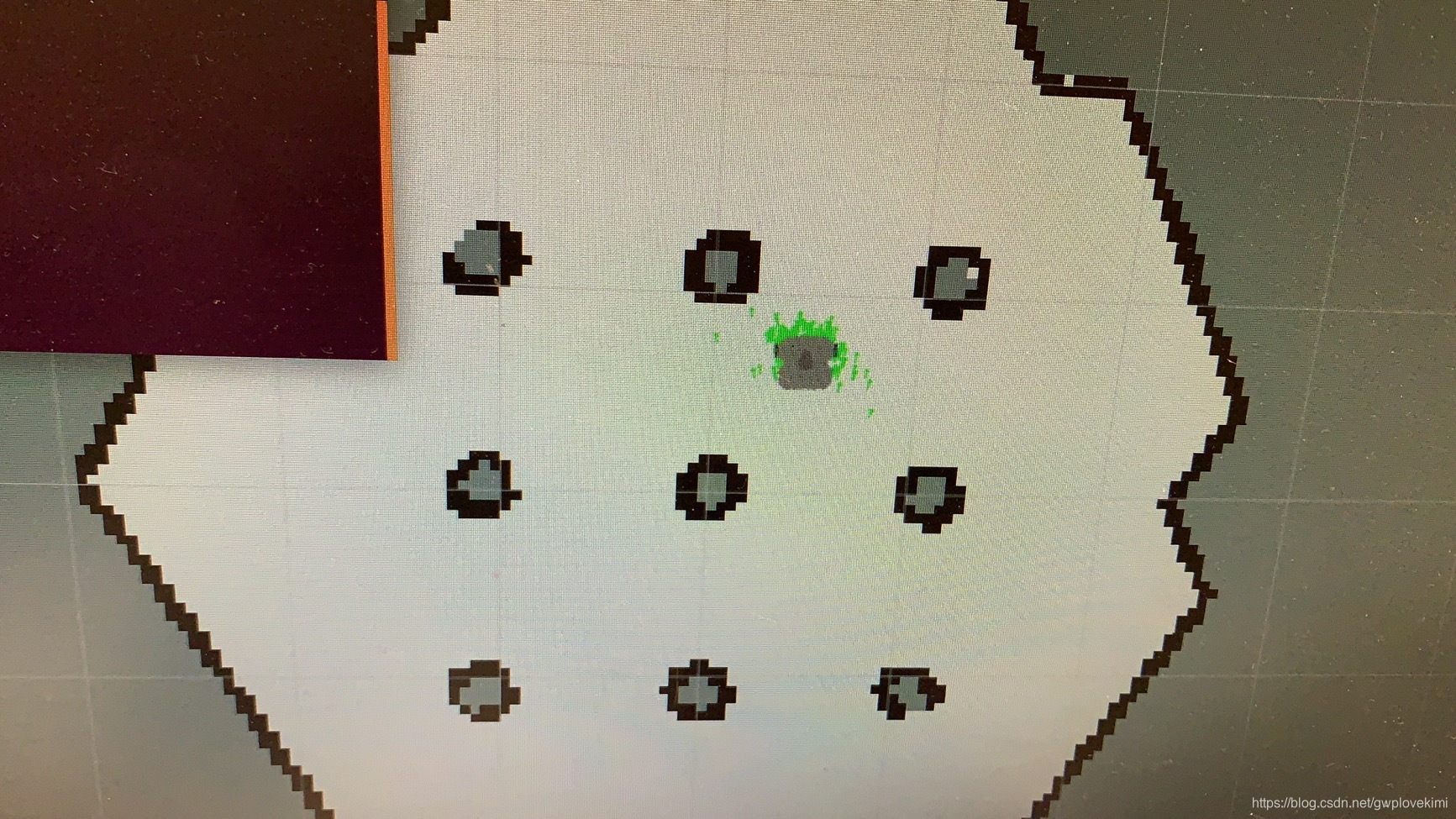
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map/simulatuion_map.yaml 一开始先预测位置,给一个pose estimate,可以看到此处可视化的amcl的点是比较散乱的

但是随着运动,就会发现点慢慢更加的密集,机器人通过slam定位对自己的位置的确信度提高了
如果没有做初始的pose估计会怎么样呢?见下图
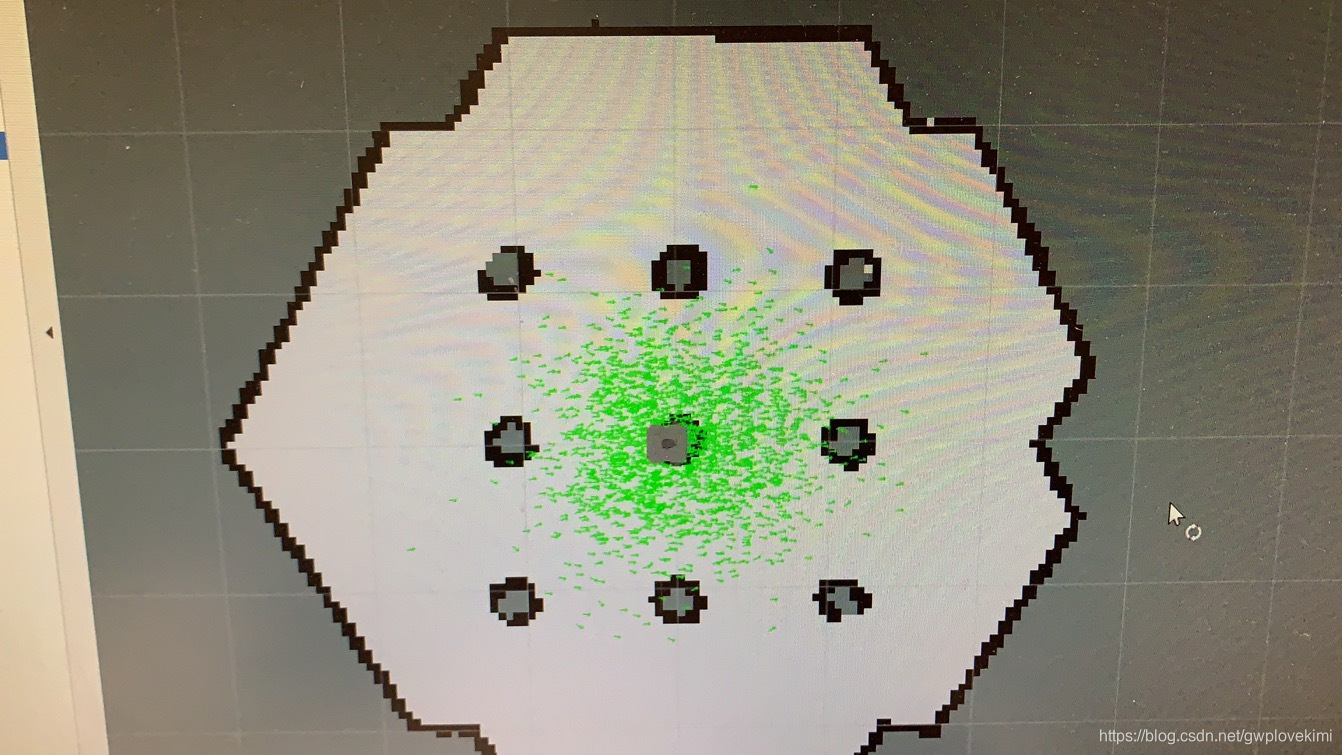
会发现amcl虽然会收敛,但是最终定位的结果是不对的。
感觉原因在于:
1、一开始撒粒子的位置。如果一开始粒子布于整张地图,这样来看,还是有机会可以不初始化就可以定位到的,只是时间久一些。
2、特征差异性。在实验中可以发现,因为场景是对称的,往左跟往上走的方向遇到的特征很像。
3、amcl中的初始位置,并不需要多精准,只需要大概的,这样粒子也分布于实际位置的附近,再通过amcl来提供高准确度定位
接下来看看rqt

可以看到amcl输入中包含了激光雷达的数据
看看amcl节点的信息
^Ckwanwaipang@kwanwaipang:~$ rosnode info /amcl
--------------------------------------------------------------------------------
Node [/amcl]
Publications:
* /amcl/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /amcl/parameter_updates [dynamic_reconfigure/Config]
* /amcl_pose [geometry_msgs/PoseWithCovarianceStamped]
* /diagnostics [diagnostic_msgs/DiagnosticArray]
* /particlecloud [geometry_msgs/PoseArray]
* /rosout [rosgraph_msgs/Log]
* /tf [tf2_msgs/TFMessage]
Subscriptions:
* /clock [rosgraph_msgs/Clock]
* /initialpose [geometry_msgs/PoseWithCovarianceStamped]
* /scan [sensor_msgs/LaserScan]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Services:
* /amcl/get_loggers
* /amcl/set_logger_level
* /amcl/set_parameters
* /global_localization
* /request_nomotion_update
* /set_map
contacting node http://10.79.138.249:46809/ ...
Pid: 11378
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (46153 - 10.79.138.249:33684) [10]
* transport: TCPROS
* topic: /tf
* to: /amcl
* direction: outbound
* transport: INTRAPROCESS
* topic: /tf
* to: /move_base
* direction: outbound (46153 - 10.79.138.249:33718) [11]
* transport: TCPROS
* topic: /tf
* to: /rviz
* direction: outbound (46153 - 10.79.138.249:33742) [14]
* transport: TCPROS
* topic: /particlecloud
* to: /rviz
* direction: outbound (46153 - 10.79.138.249:33792) [16]
* transport: TCPROS
* topic: /clock
* to: /gazebo (http://10.79.138.249:38437/)
* direction: inbound (50248 - 10.79.138.249:48561) [17]
* transport: TCPROS
* topic: /tf
* to: /amcl (http://10.79.138.249:46809/)
* direction: inbound
* transport: INTRAPROCESS
* topic: /tf
* to: /gazebo (http://10.79.138.249:38437/)
* direction: inbound (50258 - 10.79.138.249:48561) [18]
* transport: TCPROS
* topic: /tf
* to: /robot_state_publisher (http://10.79.138.249:40505/)
* direction: inbound (56252 - 10.79.138.249:48215) [19]
* transport: TCPROS
* topic: /tf_static
* to: /robot_state_publisher (http://10.79.138.249:40505/)
* direction: inbound (56256 - 10.79.138.249:48215) [20]
* transport: TCPROS
* topic: /scan
* to: /gazebo (http://10.79.138.249:38437/)
* direction: inbound (50270 - 10.79.138.249:48561) [21]
* transport: TCPROS
* topic: /initialpose
* to: /rviz (http://10.79.138.249:37941/)
* direction: inbound (33284 - 10.79.138.249:55799) [15]
* transport: TCPROS
订阅主题
-
scan (sensor_msgs/LaserScan)
Laser scans. -
tf (tf/tfMessage)
Transforms. -
initialpose (geometry_msgs/PoseWithCovarianceStamped)
Mean and covariance with which to (re-)initialize the particle filter.初始的位置 -
map (nav_msgs/OccupancyGrid)
When the use_map_topic parameter is set, AMCL subscribes to this topic to retrieve the map used for laser-based localization.
实际上初始位姿可以通过参数提供也可以使用默认初始值,我们主要是要将scan(激光)、tf和map主题提供给amcl。
发布主题
-
amcl_pose (geometry_msgs/PoseWithCovarianceStamped)
Robot’s estimated pose in the map, with covariance. -
particlecloud (geometry_msgs/PoseArray)
The set of pose estimates being maintained by the filter.(粒子滤波输出的一系列结果) -
tf (tf/tfMessage)
Publishes the transform from odom (which can be remapped via the ~odom_frame_id parameter) to map.
如果纯粹是为了显示一下机器人的位姿(in rviz)我们只需要tf主题就够了。要在地图上显示机器人的位姿,是通过tf来显示的

通过下面命令也可以查看tf tree
rosrun rqt_tf_tree rqt_tf_tree
参考资料
https://blog.csdn.net/chenxingwangzi/article/details/49802763
https://sychaichangkun.gitbooks.io/ros-tutorial-icourse163/content/chapter9/9.2.html
https://blog.csdn.net/chenxingwangzi/article/details/50038413