链接:https://www.zhihu.com/question/30094611/answer/120499954
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
一、先从旋转和缩放角度,理解一下特征向量和特征值的几何意义
从定义来理解特征向量的话,就是经过一个矩阵变换后,空间沿着特征向量的方向上相当于只发生了缩放,比如我们考虑下面的矩阵:
求这个变换的特征向量和特征值,分别是:
(列向量)
和
1.81,0.69
用一个形象的例子来说明一下几何意义,我们考虑下面笑脸图案:
<img src="https://pic4.zhimg.com/02d26c0f63edd30cd75faa3cfb21f47f_b.png" data-rawheight="487" data-rawwidth="562" class="origin_image zh-lightbox-thumb" width="562" data-original="https://pic4.zhimg.com/02d26c0f63edd30cd75faa3cfb21f47f_r.png">
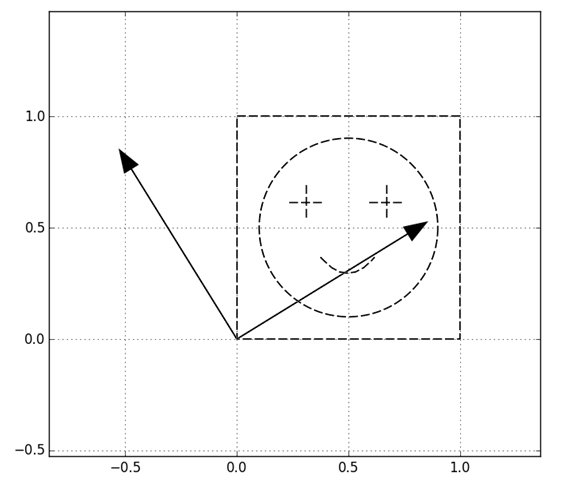
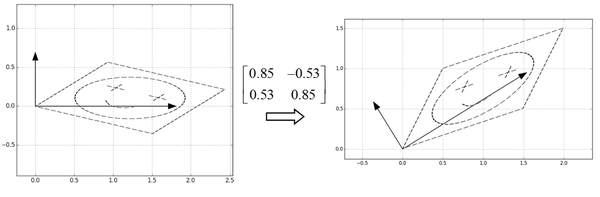
为方便演示笑脸图案在0,0和1,1围起来的单位正方形里,同时也用两个箭头标出来了特征向量的方向。经过
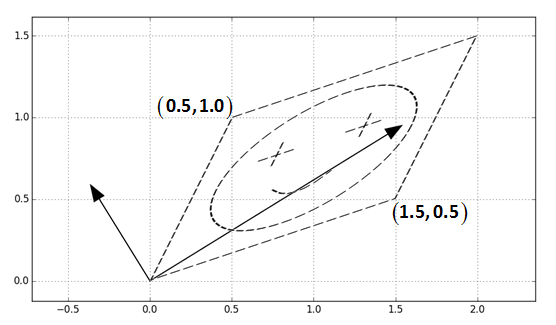
的变换,也就是用这个图案中的每个点的坐标和这个矩阵做乘法,得到下面图案:
<img src="https://pic1.zhimg.com/8f00cbd08d019eed528e2f3202034c3c_b.png" data-rawheight="325" data-rawwidth="556" class="origin_image zh-lightbox-thumb" width="556" data-original="https://pic1.zhimg.com/8f00cbd08d019eed528e2f3202034c3c_r.png">可以看到就是沿着两个正交的,特征向量的方向进行了缩放。这就是特征向量的一般的几何理解,这个理解我们也可以分解一下,从旋转和沿轴缩放的角度理解,分成三步:
可以看到就是沿着两个正交的,特征向量的方向进行了缩放。这就是特征向量的一般的几何理解,这个理解我们也可以分解一下,从旋转和沿轴缩放的角度理解,分成三步:
第一步
,把特征向量所指的方向分别转到横轴和纵轴
<img src="https://pic4.zhimg.com/8ca691941f4b219f58696e329776d933_b.png" data-rawheight="506" data-rawwidth="1370" class="origin_image zh-lightbox-thumb" width="1370" data-original="https://pic4.zhimg.com/8ca691941f4b219f58696e329776d933_r.png">
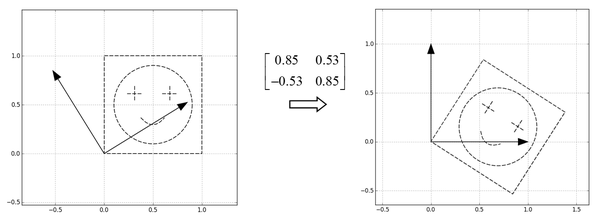
这一步相当于用U的转置,也就是
进行了变换
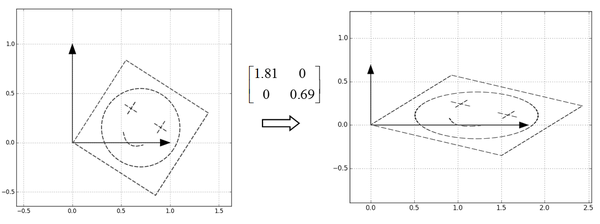
第二步
,然后把特征值作为缩放倍数,构造一个缩放矩阵
,矩阵分别沿着横轴和纵轴进行缩放:
<img src="https://pic2.zhimg.com/df8b17255468437169b3f9d598cae81d_b.png" data-rawheight="428" data-rawwidth="1147" class="origin_image zh-lightbox-thumb" width="1147" data-original="https://pic2.zhimg.com/df8b17255468437169b3f9d598cae81d_r.png">
第三步
,很自然地,接下来只要把这个图案转回去,也就是直接乘U就可以了
<img src="https://pic3.zhimg.com/7f9259783e516732e1c1009829c4e6f2_b.png" data-rawheight="369" data-rawwidth="1126" class="origin_image zh-lightbox-thumb" width="1126" data-original="https://pic3.zhimg.com/7f9259783e516732e1c1009829c4e6f2_r.png">所以,从旋转和缩放的角度,一个矩阵变换就是,旋转–>沿坐标轴缩放–>转回来,的三步操作,表达如下:
所以,从旋转和缩放的角度,一个矩阵变换就是,旋转–>沿坐标轴缩放–>转回来,的三步操作,表达如下:
多提一句,这里给的是个(半)正定矩阵的例子,对于不镇定的矩阵,也是能分解为,旋转–>沿坐标轴缩放–>旋转,的三步的,只不过最后一步和第一步的两个旋转不是转回去的关系了,表达如下:
这个就是SVD分解,就不详细说了。
另外,这个例子是二维的,高维类似,但是形象理解需要脑补。
二、协方差矩阵的特征向量
PCA的意义其他答主都说得差不多了,一句话概括就是找到方差在该方向上投影最大的那些方向,比如下边这个图是用
作为些协方差矩阵产生的高斯分布样本:
:
<img src="https://pic2.zhimg.com/06774664010719ea169deb44ba6240fd_b.png" data-rawheight="409" data-rawwidth="671" class="origin_image zh-lightbox-thumb" width="671" data-original="https://pic2.zhimg.com/06774664010719ea169deb44ba6240fd_r.png">大致用个椭圆圈出来分布,相关性最强的(0.707,0.707)方向就是投影之后方差最大的方向。
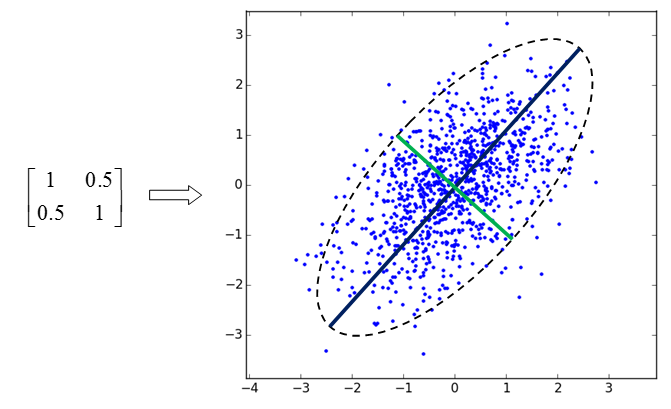
大致用个椭圆圈出来分布,相关性最强的(0.707,0.707)方向就是投影之后方差最大的方向。
接下来我们不尝试严格证明,而是从旋转和缩放的角度形象理解一下,我们可以考虑把这个分布也旋转一下,让长轴在x轴上,短轴在y轴上,变成如下:
<img src="https://pic1.zhimg.com/36ed9b9b895003148e75ffaa7bfad708_b.png" data-rawheight="345" data-rawwidth="544" class="origin_image zh-lightbox-thumb" width="544" data-original="https://pic1.zhimg.com/36ed9b9b895003148e75ffaa7bfad708_r.png">然后再沿着x轴和y轴,除以标准差,缩放成标准差为1的单位分布
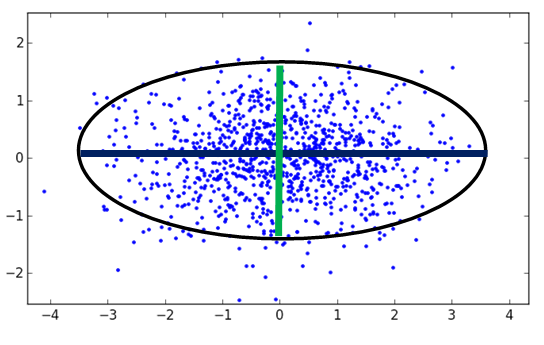
然后再沿着x轴和y轴,除以标准差,缩放成标准差为1的单位分布
<img src="https://pic3.zhimg.com/327ec561707f4efd51c178b4c1eb0af2_b.png" data-rawheight="461" data-rawwidth="481" class="origin_image zh-lightbox-thumb" width="481" data-original="https://pic3.zhimg.com/327ec561707f4efd51c178b4c1eb0af2_r.png">注意,在这个除以标准差的过程中,标准差最大的轴,就对应着原空间中,样本投影后方差最大的方向。接下来,假设这个分布中的样本为
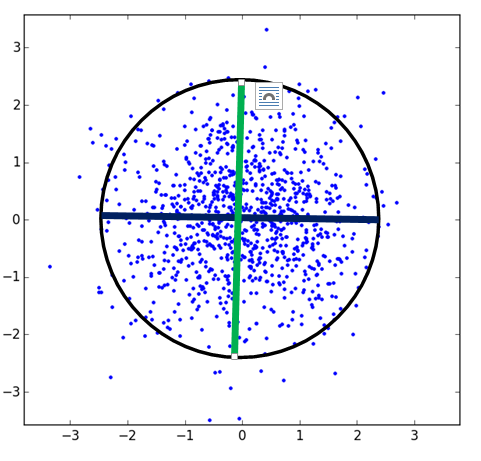
注意,在这个除以标准差的过程中,标准差最大的轴,就对应着原空间中,样本投影后方差最大的方向。接下来,假设这个分布中的样本为
,则我们可以把一开始的样本表示为:
用这么别扭的表示方式主要是为了接下来推公式方便,所以接下来推个简单的公式:
协方差矩阵,用S表示,则有
因为这个分布里两个维度的均值都是0,所以有
所以
其中N是样本数,根据前面的
,进一步展开这个公式:
因为
是个单位方差的且无相关性的样本,所以
另外L是个对角矩阵所以有
这个公式上一部分已经说过了。
所以
对角线上的元素对应的就是方差的大小,而缩放倍数就是标准差的大小,也就是特征值的开根号,而U就是要沿着缩放的方向,也就是问题中投影的方向,正是特征向量。