
网格划分的原理
1 Mesh网格划分原理
网格划分是建立CAE模型的一个重要环节,建立网格模型所花费的时间往往是取得 CAE 解决方案所耗费时间中的一个重要部分。网格直接影响到求解精度、求解收敛性和求解速度。所划分的网格形式对计算精度和计算规模将产生直接影响。网格越好,越能得到好的解决方案。
网格的节点和单元参与有限元求解,Workbench 在求解开始时会自动生成默认的网格。通过预览网格,可以检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。
Workbench的网格技术通过Mesh组件实现。Mesh中可以根据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用Fluent、CFX、POLYFLOW,结构场求解可以采用显式动力算法和隐式算法。不同的物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场,也会有不同的网格划分。
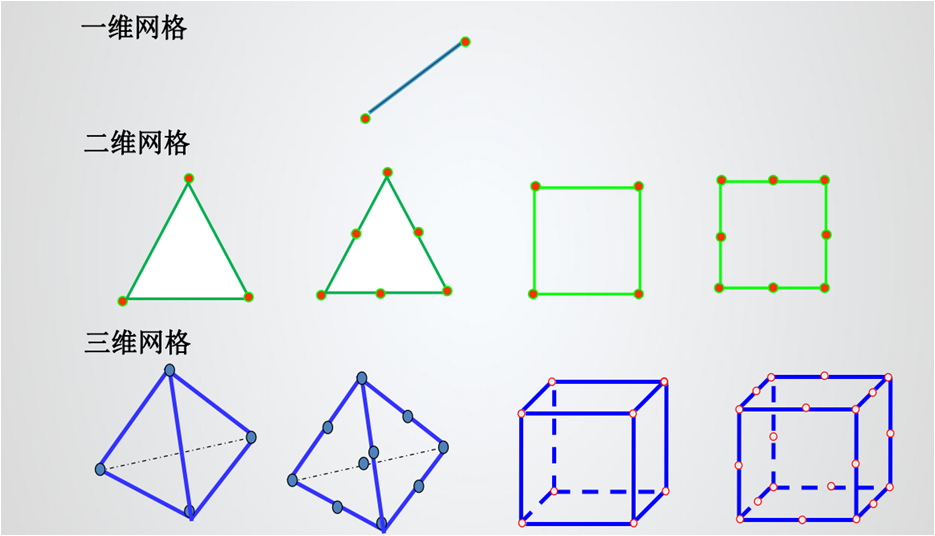
1.1 网格类型及单元阶次
1.2 网格划分的原则
-
(1)网格数量
-
(2)网格疏密
-
(3)单元形状及评价
-
(4)单元阶次
-
(5)网格质量
-
(6)网格分界面和分界点
-
(7)位移协调性
-
(8)细节处理
网格划分没有定式,只能根据经验划分网格,宽广的有限元知识和丰富的经验是保证划分良好网格的前提。
(1)网格数量
-
a.在静力分析时,假如仅仅是计算结构的变形,网格数目可以少一些。假如需要计算应力,则在精度要求相同的情况下应取相对较多的网格。
-
b.在响应计算中,计算应力响应所取的网格数应比计算位移响应多。
-
c.在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,假如计算的模态阶次较高,则应选择较多的网格。
-
d.在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。
(2)网格疏密
-
网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点 。
-
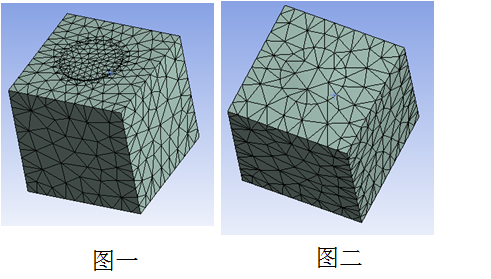
在计算数据变化梯度较大的部位(如应力集中处、几何形状、厚度变化位置),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。
-
划分疏密不同的网格主要用于应力分析(包括静应力和动应力),而计算固有特性时则趋于采用较均匀的钢格形式。这是由于固有频率和振型主要取决于结构质量分布和刚度分布,不存在类似应力集中的现象。同样,在结构温度场计算中也趋于采用均匀网格。
(3)单元形状
-
对称结构尽量使用对称网格。对称结构若使用不对称的网格可能导致错误的模态分析。

(4)单元阶次
-
很多单元都具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。
-
选用高阶单元可进步计算精度,由于高阶单元的曲线或曲 面边界能够更好地逼近结构的曲线和曲面边界,所以当结构外形不规则、应力分布或变形很复杂时可以选用高阶单元。
-
但高阶单元的节点数较多,在网格数目相同的情况下由高阶单元组成的模型规模要大得多,因此在使用时应权衡考虑计算精度和时间。
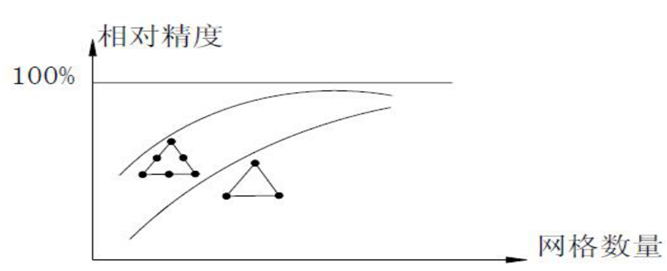
图中是一悬臂梁分别用线性和二次三角形单元离散时,其顶端位移随网格数目的收敛情况。可以看出,但网格数目较少时,两种单元的计算精度相差很大,这时采用低阶单元是不合适的。当网格数目较多时,两种单元的精度相差并不很大,这时采用高阶单元并不经济。例如在离散细节时,由于细节尺寸限制,要求细节四周的网格划分很密,这时采用线性单元更合适。
-
增加网格数目和单元阶次都可以提高计算精度。因此在精度一定的情况下,用高阶单元离散结构时应选择适当的网格数目,太多的网格并不能明显提高计算精度,反而会使计算时间大大增加。为了兼顾计算精度和计算量,同一结构可以采用不同阶次的单元,即精度要求高的重要部位用高阶单元,精度要求低的次要部位用低阶单元。不同阶次单元之间或采用特殊的过渡单元连接,或采用多点约束等式连接。
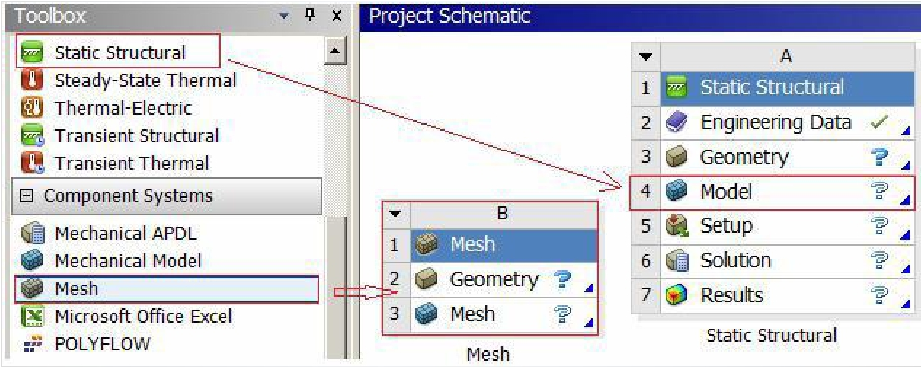
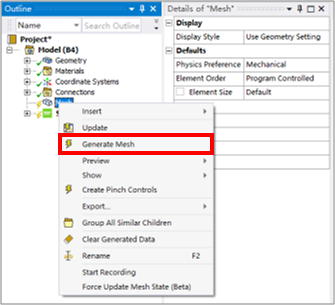
1.3 Workbench网格划分界面
-
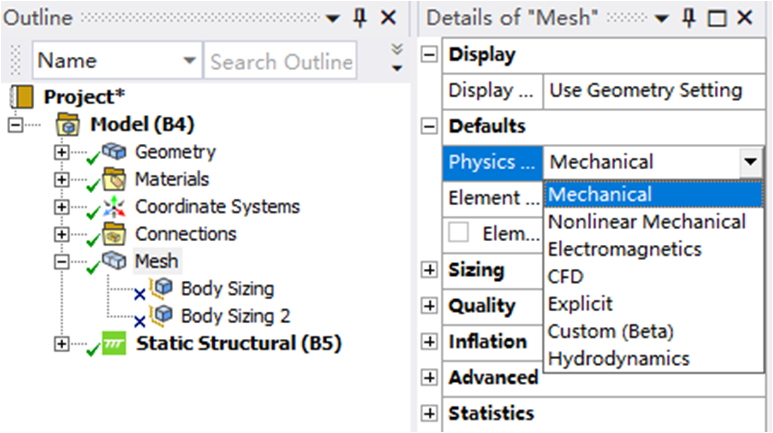
ANSYS 网格划分不能单独启动,只能在 Workbench 中调用分析系统或【Mesh】组件启动,如图所示。
-
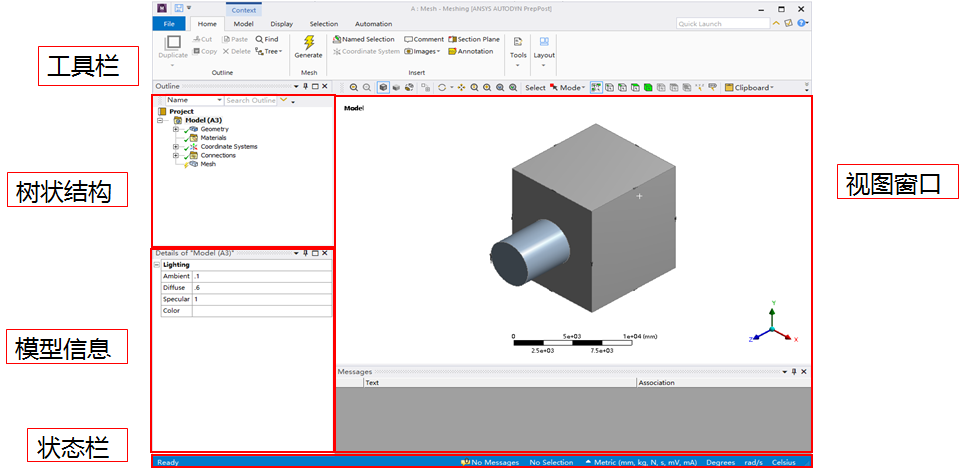
选择几何模型后,进入网格划分环境,工作界面如图
1.4 网格划分流程
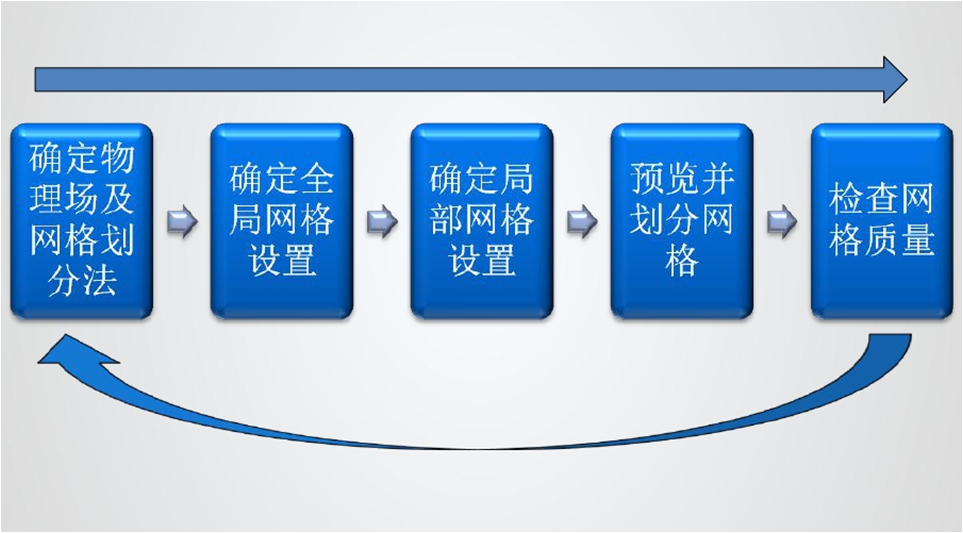
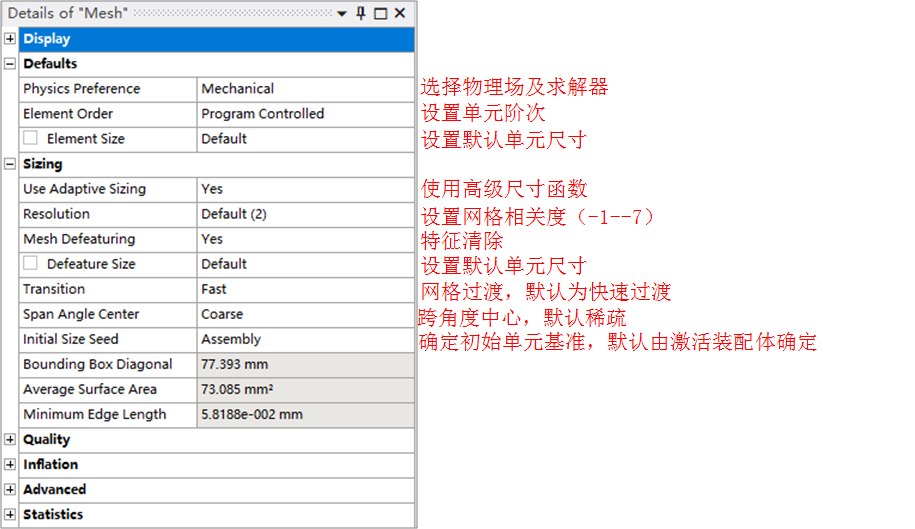
确定物理场 Physics Preference
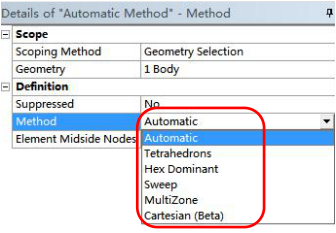
网格划分方法
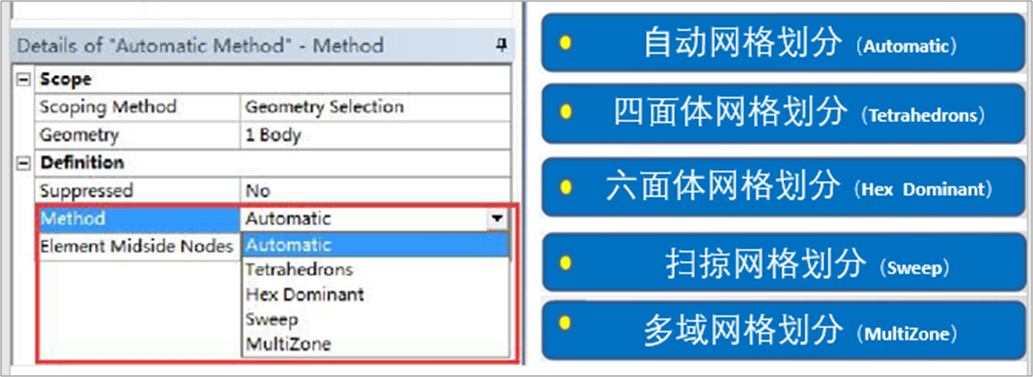
对于三维几何体,共有六种不同的划分网格法:
对于二维几何体, 首先设置分析类型
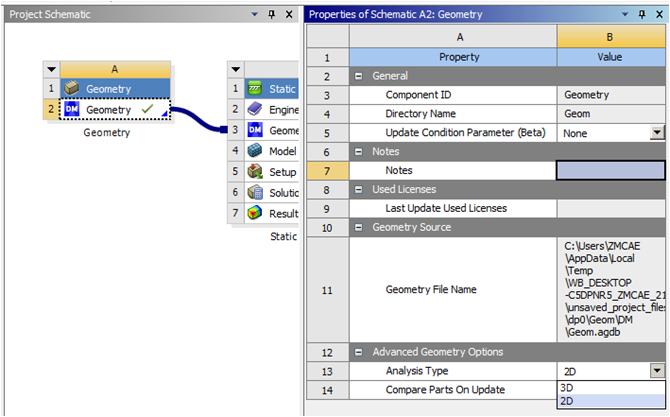
对于二维几何体,共有四种不同的划分网格法:
-
自动网格划分(Automatic)
-
三角形网格划分( Triangles )
-
四边形或三角形网格划分( MultiZone Quad/Tri)
-
四边形网格划分(Quadrilateral Dominant)
总体网格控制
2.1 概述
全局网格设置通常用于整体网格划分的部署,包括网格尺寸函数、inflation、平滑度、模型简化、参数输入、激活等。
设置合适的全局网格参数可以减小后面具体网格参数的设置工作量,下面以结构分析为例对其展开描述。
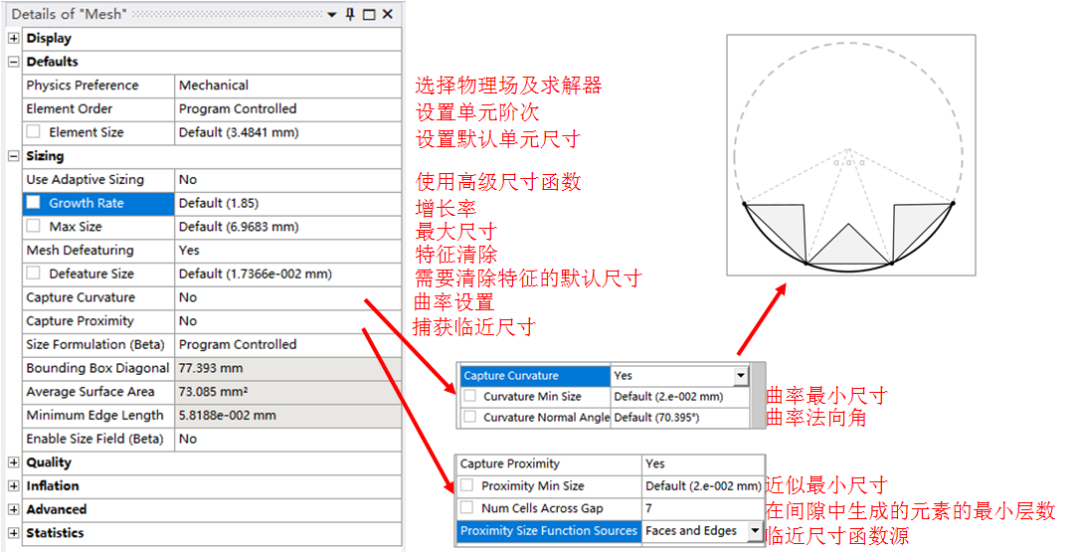
2.2 物理场和尺寸设置
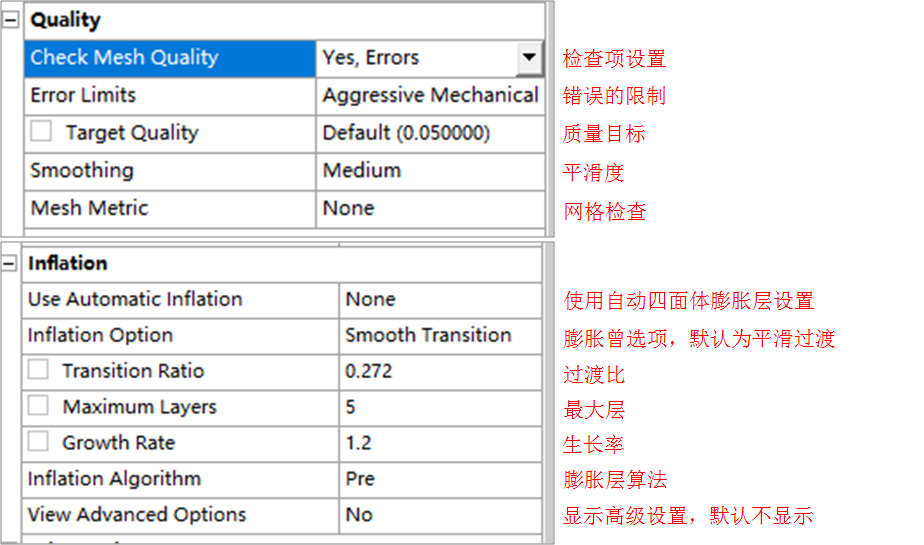
2.3 网格质量检查设置
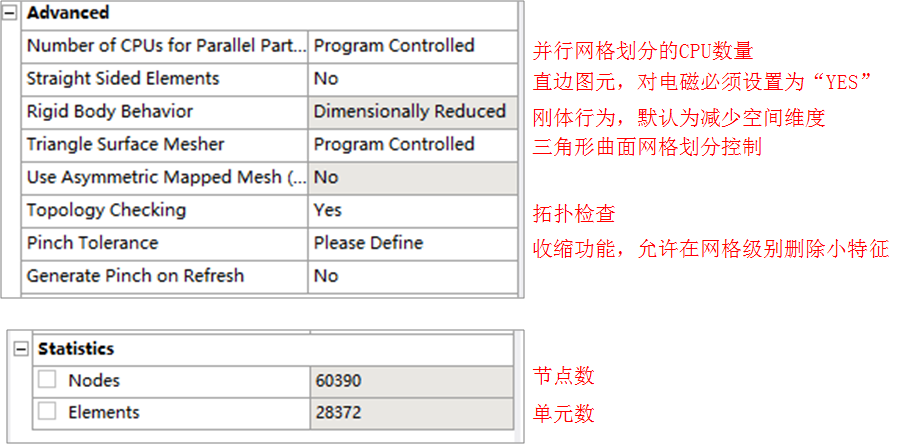
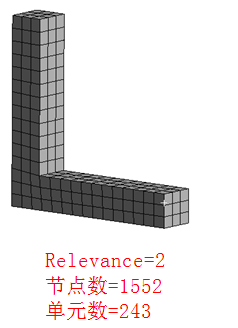
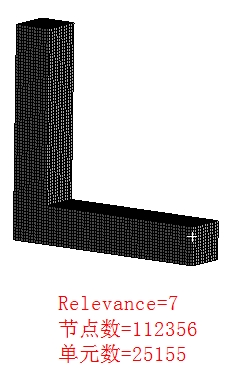
2.4 示例
-
“Relevance” 可以设置在 –1 和 +7之间

局部网格控制
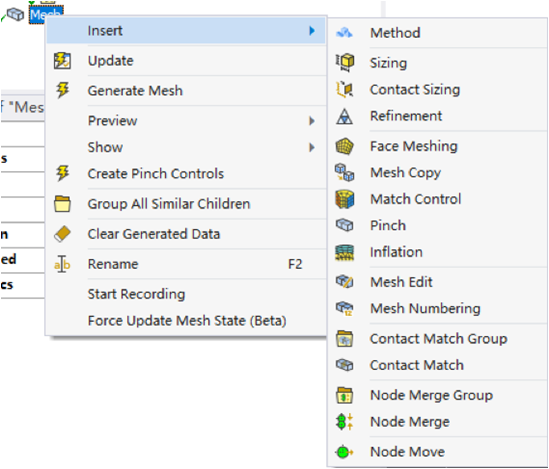
3.1 子菜单
-
通过mesh—>右键—>insert进行局部控制选项添加
-
mesh—>右键—>insert—>method
-
自动网格划分(Automatic)
-
四面体网格划分(Tetrahedrons)
-
六面体网格划分(Hex Dominant)
-
扫掠网格划分(Sweep)
-
多域网格划分(MultiZone)
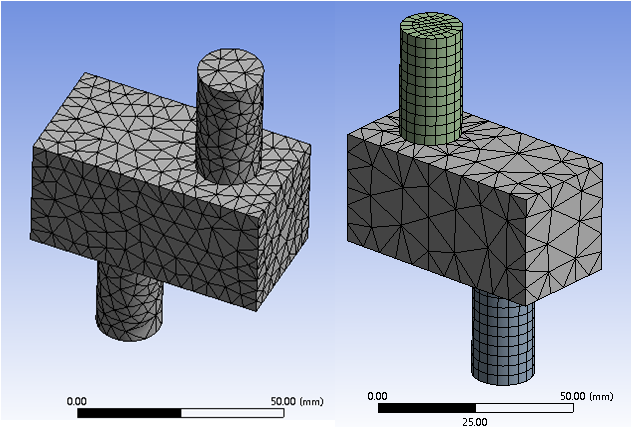
自由划分
-
导入meshing1.agdb
-
程序基于几何的复杂性,自动检测实体:
-
对可以扫掠的实体 ,扫掠的方法划分六面体网格
-
对不能扫掠划分的实体,采用协调分片算法划分四面体网格
四面体网格划分
-
生成四面体单元,有两种算法:
-
基于Tgrid的协调分片算法(Path Conforming)
-
基于ICEM Conforming的独立分片算法( Path Independent)
-
协调分片算法(Path Conforming):采用自下而上的方法网格划分先从边面开始划分,再映射到体,适用于质量较好CAD的模型
-
基于ICEM Conforming的独立分片算法( Path Independent ):采用自上而下的方法,先生成体网格,再映射到面和边生成网格。

六面体网格划分
-
生成非结构化的六面体域网格,单元类型包括:
-
主要采用六面体单元,
-
包含少量的棱锥单元和四面体单元
-
用途:
-
用于那些不能扫掠的体
-
常用与结构分析
-
用于不需要膨胀层及偏斜率和正交质量再可接受范围内的CFD网格划分
扫掠
-
对可以扫掠的实体在指定方向扫掠面网格,生成六面体单元或棱柱单元
-
扫掠划分要求:
-
实体在一个方向上具有相同的拓扑结构
-
实体只允许一个目标面和源面
-
薄壁可以有多个目标面和源面
-
查看可扫描的实体
-
修改“Method”为“Sweep”
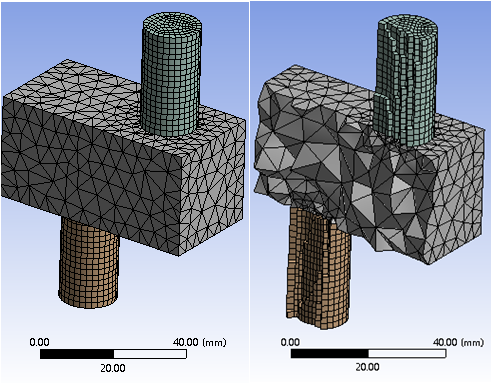
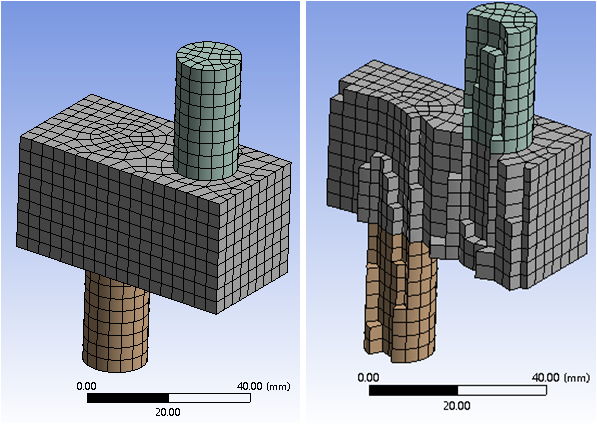
多重区域方法
-
基于ANSYS ICEM CFD六面体分块方法,自动对集合体进行分解成映射区域和自由区域
-
自动判断区域并对映射区域生成结构化网格,即生成六面体/棱柱单元
-
自由区域采用非结构化网格,即自由区域的网格可由四面体、六面体来划分
-
可以具有多个源面和目标面
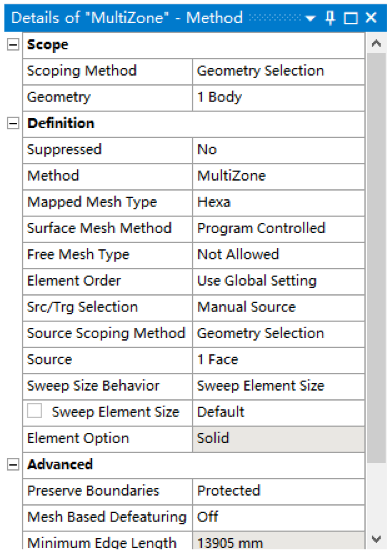
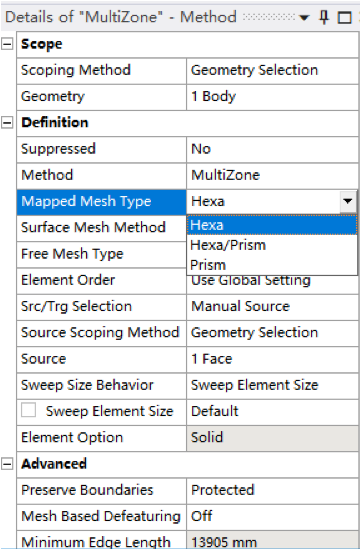
多重区域方法–Mapped Mesh Type:
-
Hexa:
-
默认
-
只有六面体单元被创建
-
Hexa/prism
-
保证质量和平滑过渡,在源面上可能包含三角形
-
Prism
-
只有三角形被创建
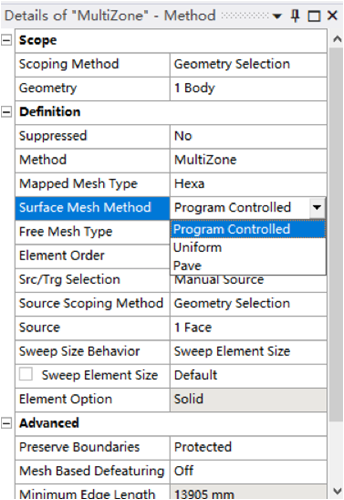
多重区域方法–表面划分方法:
-
Uniform:
-
可以创建统一高质量的单元
-
Pave
-
在面上创建曲率较好的高质量单元
-
在边线附件创建合适的高宽比单元 Program contrlooed
-
组合Uniform和Pave
多重区域方法
-
在Meishing模块划分网格
-
插入Method
-
修改网格划分的方法为“Multizone”
-
设置“Multizone”为“Tetra/Pyramid”
-
执行
3.2 尺寸控制
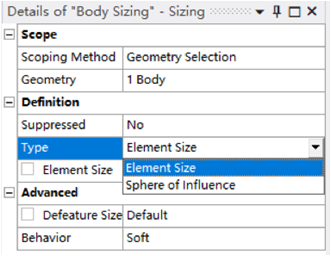
实/面–局部网格设置主要确定以下参数,常采用如下两类:
-
局部尺寸控制element size:用来设置单元的平均边长
-
影响球控制 sphere of influence:用球体来设定单元平均大小的范围,球体的中心坐标采用的是局部坐标系,所有包含在球体内的实体其单元网格大小均按设定的尺寸划分。
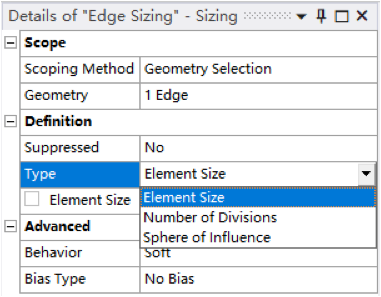
线–局部网格设置主要确定以下参数,常采用如下两类:
-
局部尺寸控制element size:用来设置单元的平均边长
-
Number of Divisions:线段平分
-
影响球控制 sphere of influence:用球体来设定单元平均大小的范围,球体的中心坐标采用的是局部坐标系,所有包含在球体内的实体其单元网格大小均按设定的尺寸划分。
3.3 接触尺寸控制
允许在接触面上产生大小一致的单元
– 接触面定义了零件间的相互作用,在接触面上采用相同的网格密度对分析有利
– 在接触区域可以设定“Element Size”或or “Relevance”
-
导入05-meshing2.x_t

3.4 网格细化
对已经划分的网格进行单元细化
– 先进行整体和局部网格控制,然后对被选的边、面进行网格细化。
refinement标准值范围是1~3之间,其中为1时,单元边界划分为初始单元边界的一半,这通常是在生成粗网格后,再细化网格的简易方法。
-
使用尺寸控制和细化控制的区别
-
尺寸控制在划分前先给出网格单元的平均单元长度通常来说,在定义的几何体上可以产生一致的网格,网格过渡平滑。
-
细化是打破原来的网格划分。如有原来的网格不是一致的,细化后的网格也不是一致的。尽管对单元的过渡进行平滑处理,但是细化仍导致不平滑的过渡。
-
在同一个表面进行尺寸和细化定义。在网格初始划分时,首先应有尺寸控制,然后在进行第二步的细化。
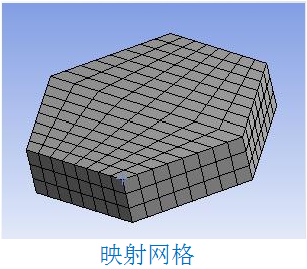
3.5 面映射
允许在面上生成结构网格,其特点是允许在面上生成结构网格,由于进行映射网格划分可以得到一致的网格,所以这对计算求解是有益的。
( 模型:05-meshing3.x_t )

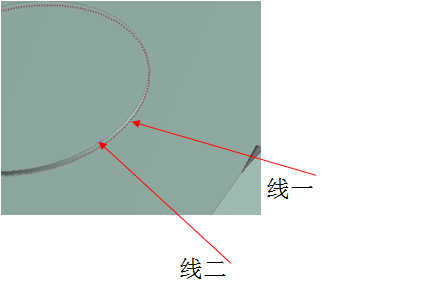
映射面网格的顶点类型可以设置三种点类型,对映射方式进行定义。
【 Specified Sides】指定夹角为 136°~224°的相交边顶点为映射面顶点,和 1 条网格线相交;
【 Specified Corners】指定夹角为 225°~314°的相交边顶点为映射面顶点,和 2 条网格线相交;
【Specified Ends】指定夹角为 0°~135°的相交边顶点为映射面顶点,与网格线不相交,示例如图所示。

3.6 匹配控制
匹配控制是将选择的两个面对象进行匹配控制,网格划分完成
后,两个面对象上的网格结构是一致的,相当于做了一个镜像操作。
导入05-meshing4.x_t
这用于定义三维实体的周期面或二维面体的周期边,从而在对称面或对称边上
划分出一致的网格。Match control尤其适用于旋转机械的旋转对称分析

3.7 简化控制-Pinch
简化控制被应用于网格的收缩控制,在划分过程中系统会自动去除一些模型上的狭小特征,如边、狭窄区等,但是只针对点和边有效,对面和体无效,且不支持直角笛卡尔网格。
3.8 分层控制-Inflation
分层网格控制用于生成沿指定边界法向的层状单元。当一些物理参数在边界层处的梯度变化恒定时,为了精确地描述这些参数,往往需要进行分层网格控制。

网格质量检查
4.1 概述
网格划分结束后可以检查网格质量,通常来说,不同物理场和不同的求解器所要求的网格检查准则是不同的。

4.2 网格检查
-
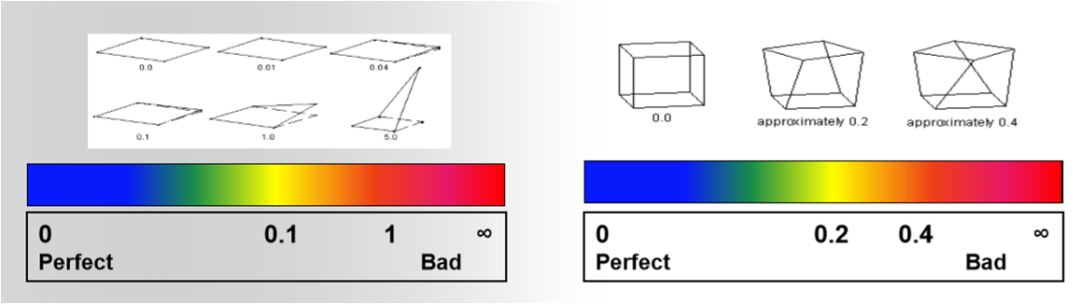
Element Quality是一种比较通用的网格检查准则,1表示完美的立方体或正方形,0表示0体积或负体积。
-
Aspect Ratio,即纵横比,值为1是说明划分的网格质量最好。
-
Jacobian Ratio,适应性较广,一半用于处理带有中间节点的单元,值为1是说明划分的网格质量好。
-
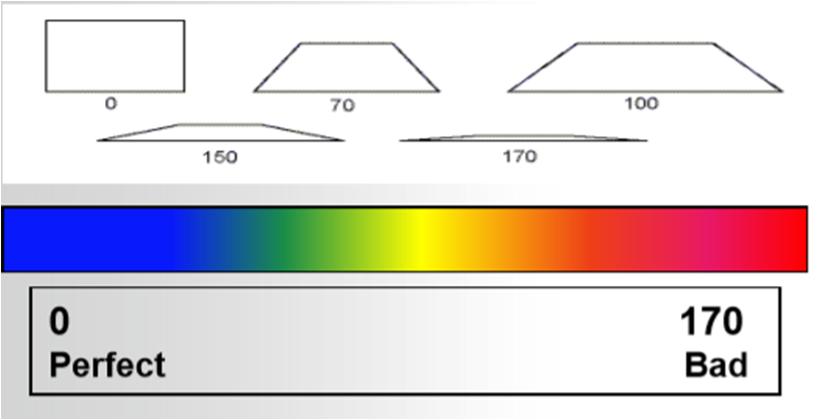
Warping Factor,用于评估或计算四边形壳单元、带有四边形面的块单元(楔形单元及金字塔单元)等,高扭曲系数表明单元控制方程不能较好控制单元,需重新划分;值为0时说明划分的网格质量最好。
-
Parallel Deviation,值为0最好,表示两对边平行。
-
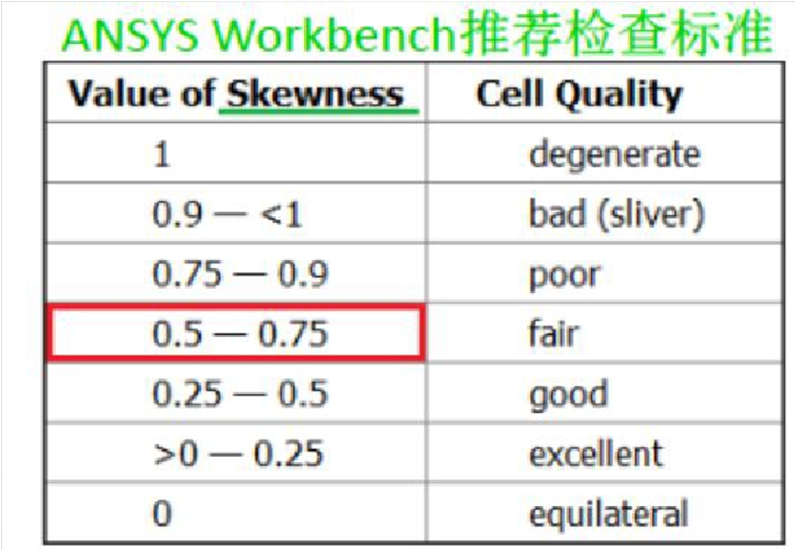
Skewness为网格质量检查的主要方法之一,值为0最好。
-
Orthogonal Qaulity,其值位于0和1之间,0最差,1最好。
4.3 网格质量标准
Element Quality–该度量基于给定单元的体积与边缘长度之比
用户可以在网格细节中使用显示样式选项。此选项能够按照质量指标以彩色显示网格

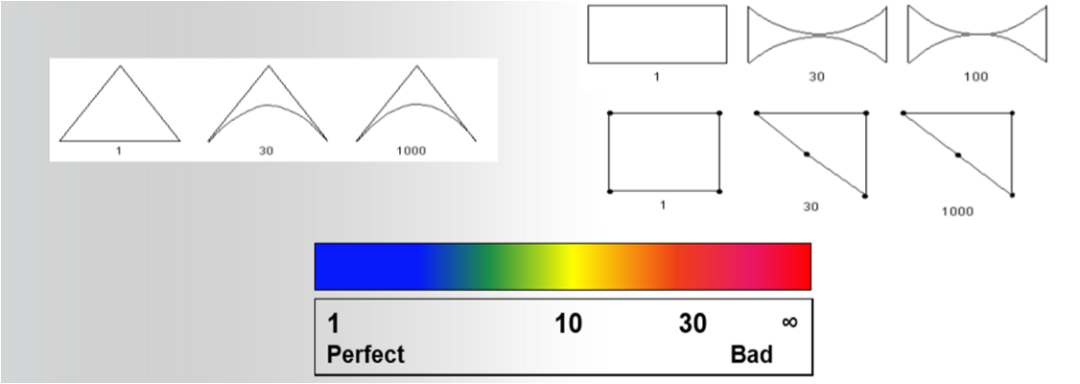
AspectRatio –单元纵横比

Jacobian Ratio
翘曲比(WarpingRatio )
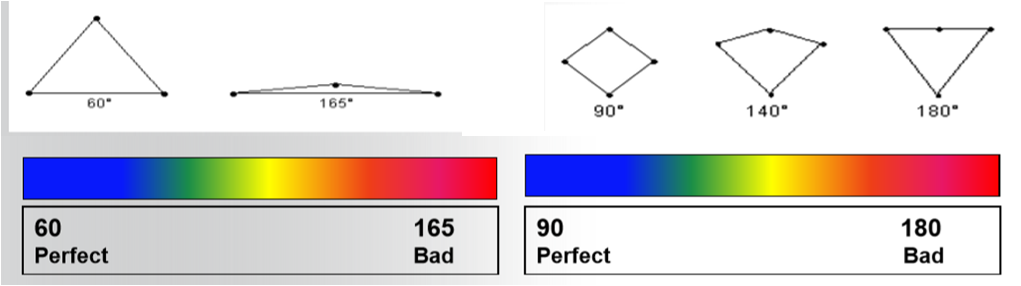
平行偏差(ParallelDeviation )
最大角偏差(MaximumCorner Deviation)
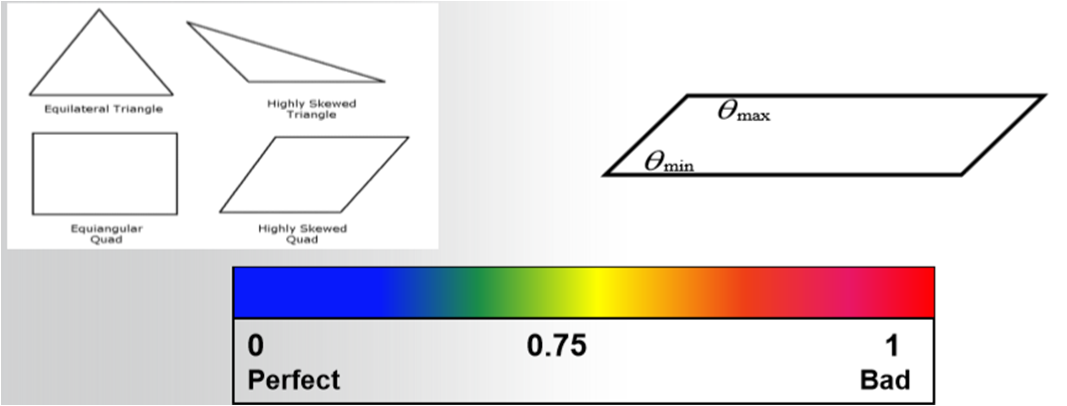
偏态(Skewness)
4.4 网格质量影响因素
-
CAD模型问题
-
小边,尖锐边和面
-
边和面间小缝隙/通道
-
未连接几何体
-
划分方法
-
划分方法不适当的使用(自动, 四面体, 扫掠, 多区)会导致大的偏斜
-
划分方法的选择取决于几何和应用程序
-
使用Outline中Mesh对象下Show the Sweepable Bodies是一个好习惯
-
许多程序利用Patch Conforming和扫掠划分方法
-
膨胀
-
不适当的表面网格质量、膨胀表面选择、膨胀选项可能导致差的网格质量!


来都来了,点个赞再走吧~~~
