前言
在复现PoinNetGPD以及整个抓取系统的搭建,需要将仿真环境中Kinect_2得到的点云从相机坐标系/kinect2_ir_optical_frame转到世界坐标系中/world。由于是在gazebo中搭建的仿真环境,所以相机和world/base_link之间的tf变换是已知的。记录如下:
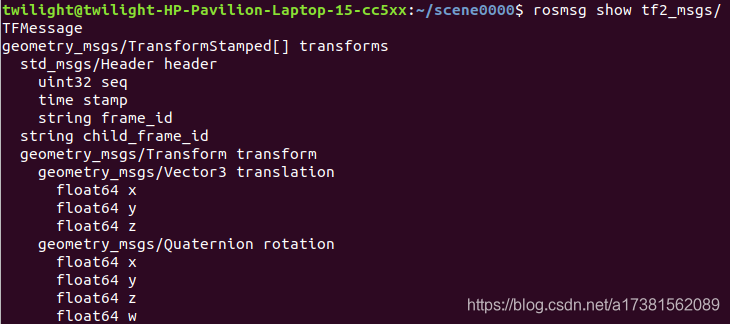
一、TF获得坐标系转换关系
首先通过tf获得trans和quat。指以/world为参考系,从/world到/kinect2_ir_optical_frame需要的平移向量trans与旋转四元数quat。
注
:得到的quat是xyzw的顺序,一般我们使用的是wxyz(用作转欧拉角等操作)。
listener = tf.TransformListener()
get_transform = False
while not get_transform:
try:
trans, quat = listener.lookupTransform('/world', '/kinect2_ir_optical_frame', rospy.Time(0))
# print(trans, quat) ## quat xyzw
# [0.8420404691331246, -0.04343000000000001, 1.5380334678129328],
# [-0.7071067251356604, 0.7071067247627317, -0.00028154403091668057, 0.00028248221651117067] xyzw
# 转为wxyz形式
quat_wxyz[0] = quat[3]
quat_wxyz[1] = quat[0]
quat_wxyz[2] = quat[1]
quat_wxyz[3] = quat[2]
二、点云坐标系转换
这里我所使用的点云为Numpy格式,shape为(500,3)。转换的思路为 P’ = R×P+T,因为点云P相对为行向量,所以实际为P’=P×R+T(这里我理解的是,平时我们处理点旋转时,点一般为列向量,所以旋转矩阵左乘R×P,但这里为行向量,所以右乘)
1.将四元数转换为旋转矩阵
def quat2rot(quat_):
q = quat_
n = np.dot(q, q)
if n < np.finfo(q.dtype).eps:
return np.identity(3)
q = q * np.sqrt(2.0 / n)
q = np.outer(q, q)
rot_matrix = np.array(
[[1.0 - q[2, 2] - q[3, 3], q[1, 2] + q[3, 0], q[1, 3] - q[2, 0]],
[q[1, 2] - q[3, 0], 1.0 - q[1, 1] - q[3, 3], q[2, 3] + q[1, 0]],
[q[1, 3] + q[2, 0], q[2, 3] - q[1, 0], 1.0 - q[1, 1] - q[2, 2]]],
dtype=q.dtype)
return rot_matrix
# [[ 1.05656190e-09 -1.00000000e+00 -1.32679448e-06]
# [-9.99999682e-01 1.76031933e-12 -7.97653505e-04]
# [ 7.97653505e-04 1.32679490e-06 -9.99999682e-01]]
2.点云变换
points_ = np.dot(points_, rotation_matrix) + np.array(cam_wor)
三、实验结果
下图为仿真kinect2相机发布的点云数据,是以/kinect2_ir_optical_frame为参考坐标系的

在python中订阅该topic得到点云并转为numpy后,将其坐标系转为世界坐标系,然后将numpy转为点云PointCloud2形式,以/world为参考坐标系发布
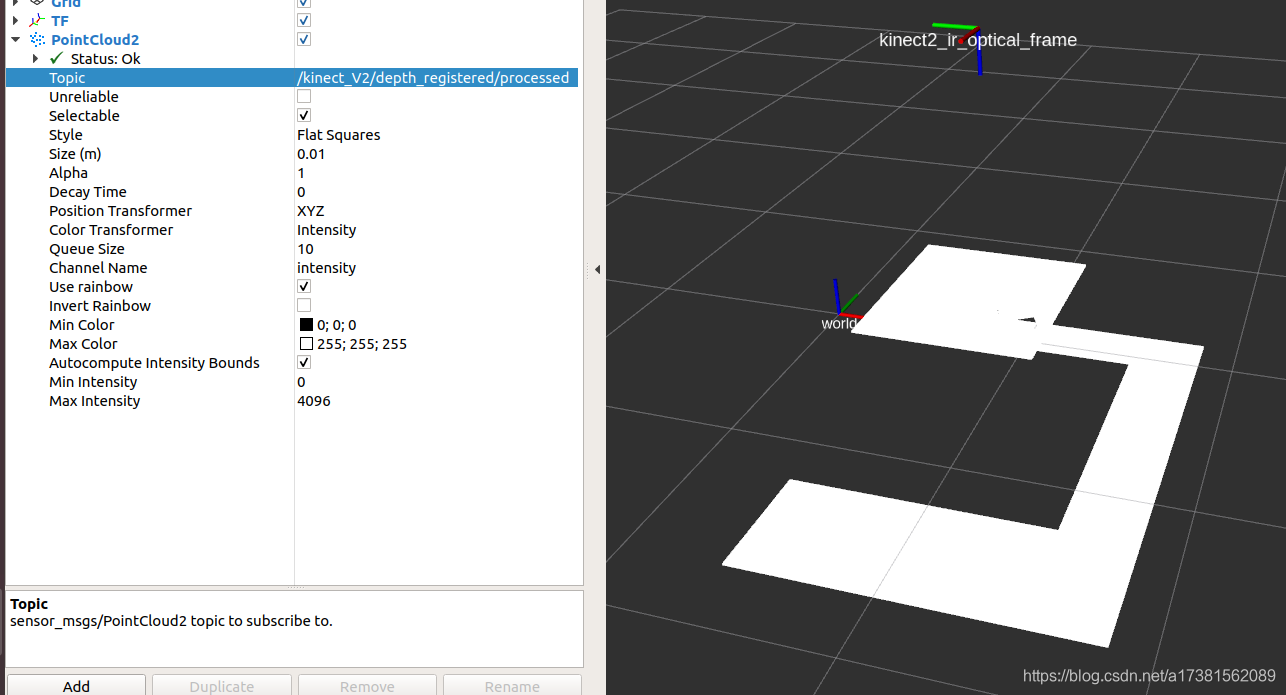
可以看出二者没有差别,证明上述过程正确。
总结
没啥好总结的,比较坑的就是lookuptransform得到的quaternion是xyzw的形式,需要转换一下。
之后还要部署真实机械臂(珞石工业机械臂),希望能够好好学一些东西。