版权声明:本文为博主原创文章,转载请附上博文链接!
1 前言
在现实生活中,有许多由机械旋转引起的噪声,例如切割机、变压器和螺旋桨等的噪声,由基频和及其谐波的线谱组成。 这些线谱通常集中在低频,而这种类型的噪声可以通过窄带有源噪声控制系统(NANC)得到有效控制。 在NANC系统中,通常使用转速计等获取噪声信号的基频,从而避免次级源的声反馈。
2 NANC系统
利用FxLMS算法的NANC系统如图所示
1
。
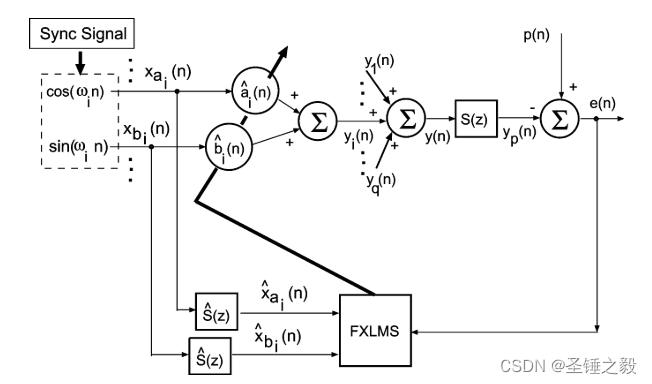
初级信号为
p
(
n
)
=
∑
i
=
1
q
[
a
i
c
o
s
(
ω
i
n
)
+
b
i
s
i
n
(
ω
i
n
)
]
+
v
p
(
n
)
p(n)=\sum_{i=1}^q [a_i cos(\omega_in)+b_isin(\omega_in)]+v_p(n)
p
(
n
)
=
i
=
1
∑
q
[
a
i
cos
(
ω
i
n
)
+
b
i
s
in
(
ω
i
n
)]
+
v
p
(
n
)
式中
q
q
q
为线谱个数,
ω
i
\omega_i
ω
i
为各线谱频率。
控制器的输出信号为
y
(
n
)
=
∑
i
=
1
q
y
i
(
n
)
=
∑
i
=
1
q
[
a
^
i
(
n
)
x
a
i
(
n
)
+
b
^
i
(
n
)
x
b
i
(
n
)
]
y(n)=\sum_{i=1}^qy_i(n)=\sum_{i=1}^q [\hat{a}_i(n)x_{a_i}(n)+\hat{b}_i(n)x_{b_i}(n)]
y
(
n
)
=
i
=
1
∑
q
y
i
(
n
)
=
i
=
1
∑
q
[
a
^
i
(
n
)
x
a
i
(
n
)
+
b
^
i
(
n
)
x
b
i
(
n
)]
式中
x
a
i
(
n
)
x_{a_i}(n)
x
a
i
(
n
)
和
x
b
i
(
n
)
x_{b_i}(n)
x
b
i
(
n
)
分别为
x
a
i
(
n
)
=
c
o
s
(
ω
i
n
)
x_{a_i}(n)=\mathrm{cos}(\omega_in)
x
a
i
(
n
)
=
cos
(
ω
i
n
)
x
b
i
(
n
)
=
s
i
n
(
ω
i
n
)
x_{b_i}(n)=\mathrm{sin}(\omega_in)
x
b
i
(
n
)
=
sin
(
ω
i
n
)
则FxLMS算法的迭代公式为
a
^
i
(
n
+
1
)
=
a
^
i
(
n
)
+
μ
i
e
(
n
)
x
^
a
i
(
n
)
\hat{a}_i(n+1)=\hat{a}_i(n)+\mu_ie(n)\hat{x}_{a_i}(n)
a
^
i
(
n
+
1
)
=
a
^
i
(
n
)
+
μ
i
e
(
n
)
x
^
a
i
(
n
)
b
^
i
(
n
+
1
)
=
b
^
i
(
n
)
+
μ
i
e
(
n
)
x
^
b
i
(
n
)
\hat{b}_i(n+1)=\hat{b}_i(n)+\mu_ie(n)\hat{x}_{b_i}(n)
b
^
i
(
n
+
1
)
=
b
^
i
(
n
)
+
μ
i
e
(
n
)
x
^
b
i
(
n
)
式中
x
^
a
i
(
n
)
=
∑
j
=
0
M
^
−
1
s
^
j
x
a
i
(
n
−
j
)
=
α
^
i
x
a
i
(
n
)
+
β
^
i
x
b
i
(
n
)
\hat{x}_{a_i}(n)=\sum_{j=0}^{\hat{M}-1}\hat{s}_jx_{a_{i}}(n-j)=\hat{\alpha}_ix_{a_{i}}(n)+\hat{\beta}_ix_{b_{i}}(n)
x
^
a
i
(
n
)
=
j
=
0
∑
M
^
−
1
s
^
j
x
a
i
(
n
−
j
)
=
α
^
i
x
a
i
(
n
)
+
β
^
i
x
b
i
(
n
)
x
^
b
i
(
n
)
=
∑
j
=
0
M
^
−
1
s
^
j
x
b
i
(
n
−
j
)
=
−
β
^
i
x
a
i
(
n
)
+
α
^
i
x
b
i
(
n
)
\hat{x}_{b_i}(n)=\sum_{j=0}^{\hat{M}-1}\hat{s}_jx_{b_{i}}(n-j)=-\hat{\beta}_ix_{a_{i}}(n)+\hat{\alpha}_ix_{b_{i}}(n)
x
^
b
i
(
n
)
=
j
=
0
∑
M
^
−
1
s
^
j
x
b
i
(
n
−
j
)
=
−
β
^
i
x
a
i
(
n
)
+
α
^
i
x
b
i
(
n
)
α
^
i
=
∑
j
=
0
M
^
−
1
s
^
j
c
o
s
(
j
ω
i
)
\hat{\alpha}_i=\sum_{j=0}^{\hat{M}-1}\hat{s}_j\mathrm{cos}(j\omega_i)
α
^
i
=
j
=
0
∑
M
^
−
1
s
^
j
cos
(
j
ω
i
)
β
^
i
=
∑
j
=
0
M
^
−
1
s
^
j
s
i
n
(
j
ω
i
)
\hat{\beta}_i=\sum_{j=0}^{\hat{M}-1}\hat{s}_j\mathrm{sin}(j\omega_i)
β
^
i
=
j
=
0
∑
M
^
−
1
s
^
j
sin
(
j
ω
i
)
3 总结
对于单个线谱的有源控制,只需要长度为2的控制器权系数即可得到有效控制。利用NANC控制系统,可以对每个频率进行分别控制,例如只控制基频而对其倍频不做处理。另外,在NANC中容易产生频率失配问题,当参考信号频率与初级信号频率存在误差时,对系统性能有一定程度的影响
2
。
-
来源于
Xiao, Y. G., et al. . Stochastic Analysis of the FXLMS-Based Narrowband Active Noise Control System. IEEE Transactions on Audio, Speech, and Language Processing, 2008, 16(5): 1000-1014.
↩︎
-
Xiao, Y. G., et al. A New Robust Narrowband Active Noise Control System in the Presence of Frequency Mismatch. IEEE Transactions on Audio, Speech and Language Processing, 2006, 14(6): 2189-200.
↩︎