1.通用定时器PWM概述:

STM32PWM工作过程:
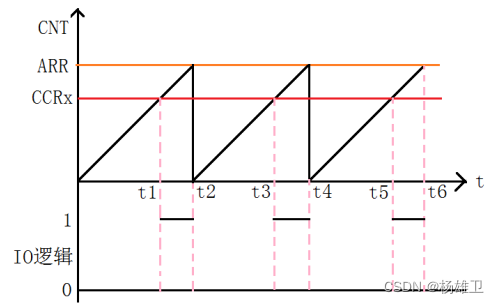
周期:ARR;占空比:CCRX;
PWM模式:脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定的频率,由TIMx_CCRx确定占空比的信号。
STM32PWM工作过程(通道1为例):

CCR1:捕获比较值寄存器:设置比较值;
CCMx_CCMR1:OC1M[2:0]位:对于PWM方式下,用于设置PWM模式1[110]或者PWM模式2[111];
TIMx_CCER:CC1P位:输入/捕获1输出极性。0:高电平有效,1:低电平有效;
TIMx_CCER:CC1E位:输入/捕获1输出使能。0:关闭,1:打开;
实验要求:使用定时器14的PWM功能,输出占空比可变的PWM波,用来驱动LED灯,从而达到LED[PF9]亮度由暗变亮,又从亮变暗,如此循环。
实验源码:
pwm.h
void TIM14_PWM_Init(u32 arr,u32 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF,ENABLE); //PORTF使能
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9复用为TIM14
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9; //GPIOF9
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType=GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9
TIM_TimeBaseStruct.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseStruct.TIM_Period=arr; //自动重装载值
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStruct); //初始化定时器14
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; //PWM调制模式1
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//比较输出使能
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low; //输出极性低
TIM_OC1Init(TIM14,&TIM_OCInitStructure); //初始化外设TIM14OC1
TIM_OC1PreloadConfig(TIM14,TIM_OCPreload_Enable); //使能预装载寄存器
TIM_ARRPreloadConfig(TIM14,ENABLE); //ARPE使能
TIM_Cmd(TIM14,ENABLE); //使能定时器14
}main.c
int main()
{
u16 led0pwmval=0;
u8 dir=1;
delay_Init(168); //初始化延时函数
TIM14_PWM_Init(500-1,84-1); //
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;//dir==1,led0pwmval递增
else led0pwmval--; //dir==0,led0pwmval递减
if(led0pwmval>300)dir=0;//led0pwmval到达300后,方向为递减
if(led0pwmval=0)dir=1; //led0pwmval递减到0后,方向为递增
TIM_SetCompare1(TIM14,led0pwmval);//修改比较值,修改占空比
}
}
版权声明:本文为wei054716原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。