以下皆以单目为主
(一)输入
- 图像+时间戳(用于传感器融合)
- 相机内参:zoom不可改变,否则影响焦距和成像:内参跟图像大小有关(图像缩放,内参也要相应功缩放)
- 特征检测描述子类型,及对应描述子DBOW词袋(这里是ORB特征)
(二)数据结构
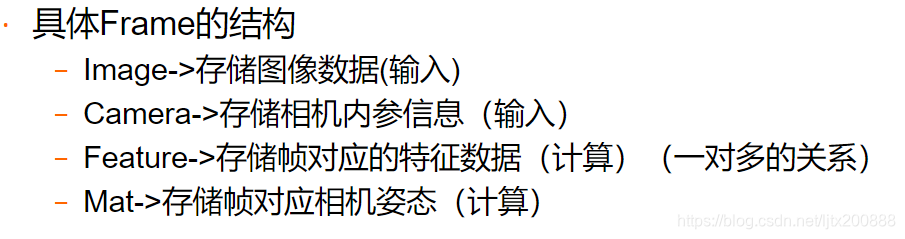
1、Fmera:
将获取的图像数据连同当前相机参数封装成
帧
,之后主要对帧进行操作:
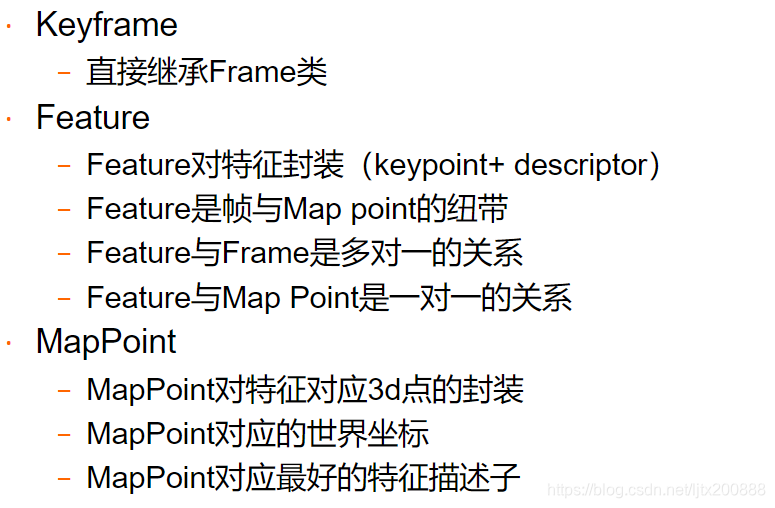
2、其他:
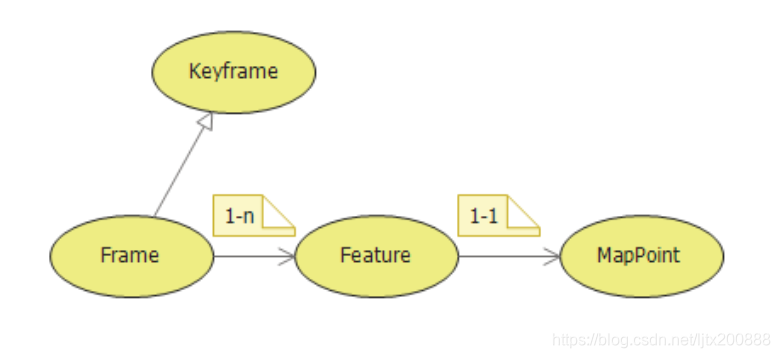
3、关系图:
(三)Tracking线程
功能:
确定每帧位姿;确定关键帧给Local Mapping
分模块:
初始化、跟踪、重定位、确定关键帧
1、初始化:
目的:每两帧2D-2D计算的位姿尺度不是统一的,需要确定较为准确的3D点,通过3D-2D获得统一尺度的位姿。
自动初始化方法:分出两个线程同时计算单应矩阵约束与基础矩阵约束,根据两种约束关系计算累计误差,由累计误差比值确定特定环境下最终选择哪一约束。
2、跟踪:
获得当前帧与MapPoint的匹配关系,一般跟踪方法:帧与帧;帧与地图。
- 帧与帧(以下二选一):
跟最近关键帧匹配(利用词袋来辅助匹配)
根据假设运动模型估计当前帧位姿,将上一帧map point投影到当前帧来匹配
- 帧与局部地图(必须进行):
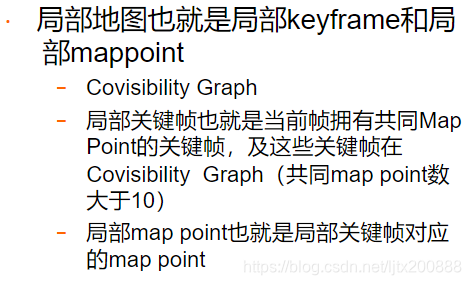
(1)ORB-SLAM局部地图组成:
(2)MapPoint投影到当前帧经过以下过滤后,再寻找匹配:
MapPoint必须能投到当前帧上(超出边界就排除);
MapPoint在相机坐标系下深度得是正;
MapPoint在深度范围内(每个MapPoint都会计算最大最小深度)
当前视图与MapPoint平均视图方向夹角小于60(防止视角变化导致的误匹配)。
3、重定位:
- 对关键帧序列查找找到共视帧作为后选帧;
- 对每一关键帧DBow匹配,当匹配数超过15,EPnp计算当前帧位姿;
- 5次RANSAC迭代,优化位姿;
- 优化后匹配特征数若小于50,则通过候选帧MapPoint投影到当前帧寻找匹配,然后再次优化帧,直到匹配大于50则重定位成功。
4、确定新关键帧:
当两帧间隔较大,匹配到的MapPoint较少,局部优化空闲时需要添加关键帧。
(四)Local Mapping线程
功能:
局部地图维护与优化
分模块:
关键帧添加、新Map Point创建与融合、局部优化、差Map point与重叠关键帧剔除
1、关键帧添加:
确定新关键帧后,需维护Covisibility Graph,spanning tree,Map并计算该帧词袋匹配,为三角化作准备;
2、新Map Point创建:
- 找到共视邻接关键帧(共视点数设为20);
- 对邻接关键帧遍历,通过与当前关键帧极线上搜索并匹配;
- 匹配后三角化计算3D点;
- 配置MapPoint相关属性(平均视向,观测距离,最佳描述子等);
- 检查新建MapPoint与之前MapPoint是否有交集:找到当前帧的邻接帧的邻接帧(二级邻接帧),将当前关键帧MapPoint投影到两级邻接帧上,判读同一特征下是否有多个MapPoint值,若是就选观测最多的那个;否则将新MapPoint加入每一帧上。
- 更新了MapPoint后对Covisibility Graph和Spanning Tree更新。
3、局部BA优化:
根据Civisibility Graph确定局部关键帧并设为图节点,并将局部关键帧上的MapPoint设为图节点;图边观测值为MapPoint对应特征坐标,考虑一个像素误差*尺度作为信息矩阵;去除不好的边多次优化。
4、MapPoint和关键帧剔除:
MapPoint被观测次数少;关键帧上的MapPoint在局部关键帧中被至少3个其他关键帧观测90%以上都剔除。
(五)Loop Closing线程
功能:
克服位姿计算误差引起的尺度漂移,进而导致的轨迹误差进一步扩大
分模块:
回环检测、相似变换、闭环融合、优化Essential Graph
1、回环候选帧检测
:根据Covisibility Graph确定局部关键帧;在关键帧序列找相似度与局部关键帧相似度一样的作为候选帧;对每个候选帧检测时间一致性(当前帧前后几帧都与候选帧相似)
2、计算sim3:
当前帧与候选帧匹配后再Map point匹配,然后RANSAC计算sim3,然后互投影各自Map point寻找匹配,优化sim3 ,然后将闭环帧和其相邻帧的Map point用sim3投影到当前帧,寻找更多匹配,若匹配数大于40则计算成功。
3、闭环融合
:将当前帧对应Mappoint换成对应闭环上及其相邻帧的;重建covisibility graph;
4、优化Essential Graph:
所有关键帧作为顶点,估计量为其sim3,闭环帧不做优化;对于当前帧集合与闭环帧集合添加闭合边(观测值为两帧间的相似变化);对每个关键帧找到spanning tree中的父节点帧,添加边;边添加完后进行位姿图优化。
5、全局BA:
所有关键帧与mappoint一起作为顶点进行全局优化。