概述
teb_localplanner是以优化的方法进行局部导航的软件包。基于timed elastic band 方法进行轨迹生成。考虑了运动时的轨迹执行时间、避障、动力学的界约束等条件。此笔记是对teb包的源代码进行学习的一个记录。
teb包的类继承图
1、teb中的g2o类型
利用doxywizard+graphiz对包进行解析,查看类继承图
teb的优化问题的解决利用了开源软件包g2o,先看看对g2o边和顶点的定义。
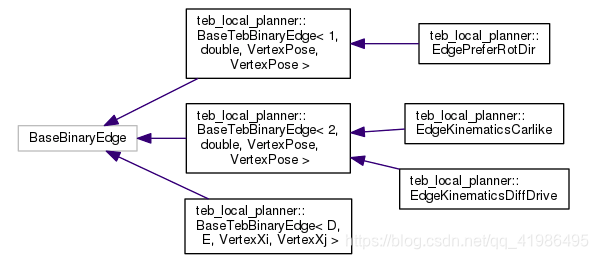
主要是考虑了运动学的约束关系(车的相邻的两个位姿态必须落在一个圆弧上)。二元边的两个顶点分别是两个位姿。还限制了最小转弯半径。
一元边:
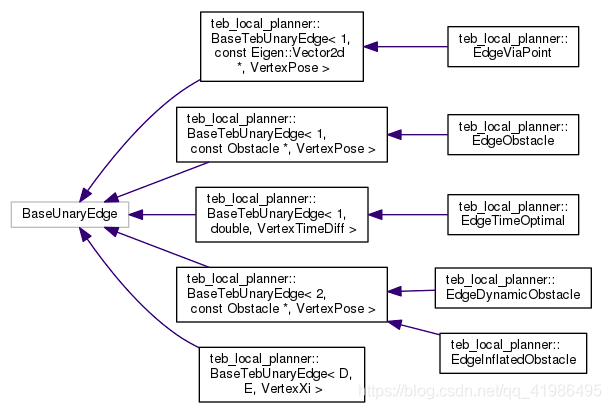
EdgeViaPoint:以指定的经过点位置与待优化位姿(顶点)的误差作为目标。(保证轨迹会经过指定点)
EdgeObstacle:以障碍物与待优化位姿(顶点)的距离经过惩罚函数后的输出作为目标(保证离障碍物大于一定距离)
EdgeTimeOptimal:以时间间隔dt最小作为目标。(保证时间最短轨迹)
多元边(note:构造函数中resize顶点的个数):
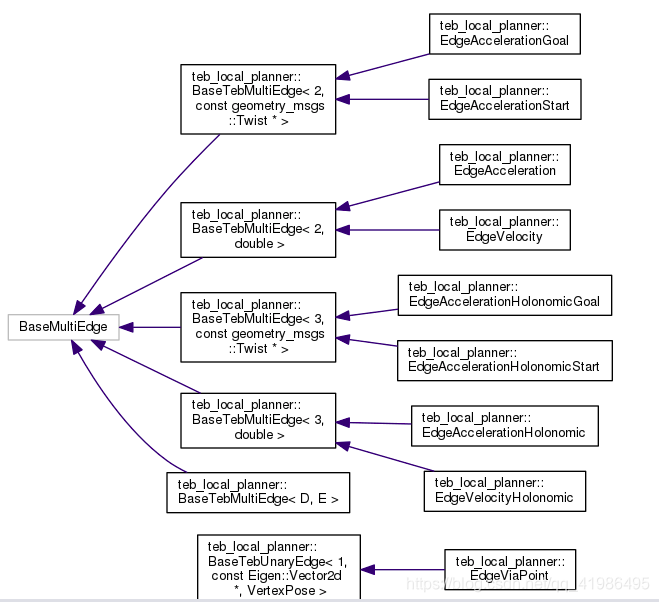
EdgeVelocity:以实际速度和限定最大速度经过惩罚函数的输出作为目标函数,顶点为相邻的位姿和时间间隔。(限制实际速度不超过最大,程序中引入了sigmoid函数决定速度的符号(根据论文内的说法,引入此函数是因为优化算法只能求解连续函数))。
Edgevelocityholonomic:与EdgeVelocity的区别在于,ds是机器人本体坐标系下的,然后去求速度在本体坐标系下的表示。其余思路一致。
2、其他类
类的简介:
此类定义了一条时变弹性带的轨迹模型,里面包含两个最重要的数据,数据类型为位姿(teb定义的g2o顶点)指针的vector,数据类型为时间(teb定义g2o顶点)指针的vector。
类的接口(仅列举一部分):对位姿、时间顶点的入栈、出栈、插入、删除、读取等操作;初始化轨迹(以指定的起点和终点进行插值产生的轨迹);更新和改变轨迹(根据现在的位置更新起点(vector中的第一个点),改变终点);找到最近点(离指定的点、直线或者其他);计算是走过的路程之和;计算花费时间之和;探测轨迹是否转弯等操作。
=======================================================
类简介:此类中主要存储了用于配置TEB的参数,包括轨迹参数、障碍参数、机器人参数、优化参数、目标tolerance参数、同伦类参数(这是啥?)。
轨迹参数:包含轨迹的时空分辨率的指定、采用、是否以全局目标覆盖局部子目标、via_point序列等等。
障碍参数:与障碍的最小分隔距离、膨胀半径、是否包含动态障碍(会启用常速度模型预测障碍位置)、等参数。
机器人参数:机器人的x,y,theta速度、加速度限制、最小转弯半径限制
目标容忍参数:机器人到达目标时允许的位姿误差。
优化参数:迭代次数、各个子目标的权重等。
同伦类参数:是否启动一次规划多个轨迹、是否多线程规划、同伦类的数量等等
恢复参数:解决一些震荡的问题。
接口:从ros服务器中加载参数、动态设置ros服务器中的参数、返回内部配置的互斥锁、检查参数。
=====================================================
PlannerInterface:
类简介:定义了局部规划器的接口。
接口:
virtual plan():根据初始的参照规划(位姿序列)、或者起点终点,提供方法去规划和创造一条轨迹。
virtual getVelocityCommand():获取用于控制机器人的速度命令
virtual void clearPlanner():重置规划器。
virtual bool isTrajectoryFeasible():通过检测轨迹的一部分是否与障碍碰撞而检查轨迹是否可行。
virtual bool isHorizonReductionAppropriate():该方法是在确定规划器提供的轨迹不可行的情况下调用的。在某些情况下,视界长度的缩短可能会解决问题,例如,如果计划的轨道抄近路。由于轨迹表示由规划器管理,所以它是基本planner_interface的一部分。实现是可选的。如果没有指定,该方法返回false。
virtual void computeCurrentCost():返回目前的图优化的花费。
TebOptimalPlanner
类简介
:这个类使用了g2o优化了时变弹性带的轨迹。
接口
:
TebOptimalPlanner() :构造函数,初始化了cfg参数、机器人模型、viapoint和起点终点速度。
~TebOptimalPlanner() :析构函数,清除图。
plan():调用方法去生成和优化轨迹(根据先前产生的轨迹,调用optimizeTEB()来优化轨迹。
getVelocityCommand():若存在规划好的轨迹,则根据位姿、时间间隔求取速度。
optimizeTEB():里面有两层循环,分别叫外部循环和内部循环。外部循环通过调用TimedElasticBand::autoResize()来根据时间分辨率调整轨迹。内部循环调用optimizeGraph()进行优化。外部的循环时间应根据cpu的控制速率要求来定,内部循环的时间经过实验2-6次足够。最后调用 see computeCurrentCost().计算轨迹花费。
setVelocityStart():设定轨迹的初始速度。
setObstVector ():设定障碍用于轨迹规划。
visualize():发布局部规划pose、footprint模型等。
保护成员函数
:主要负责构建图优化问题。
initOptimizer():初始化优化器。设定线性求解器、块求解器、求解算法等。
buildGraph ():根据超图问题描述构建图优化问题。若顶点和边非空,则add。
optimizeGraph():根据之前建好的优化问题,调用优化器optimizer优化图。
AddTEBVertices():将timedElasticBand类型中的位姿顶点序列、时间顶点序列依次加入图中。note:添加顺序会影响稀疏矩阵的结构进而影响优化效率。
AddEdgesVelocity():对于timedElasticBand类型中的位姿顶点序列-1条边,设置该边的顶点和权重矩阵,添加该边。
clearPlanner():清除图,清除时变弹性带轨迹
computeCurrentCost():将图中所有边的error的平方和构成cost,存在支持多条轨迹的重载版本。
extractVelocity():计算,提取机器人的速度在本体坐标系下的表示。
Compute the velocity profile of the trajectory():计算整条轨迹的速度曲线,以vector矢量方式保存。
getFullTrajectory():获得整个轨迹的位姿、速度、时间。将其存储在TrajectoryPointMsg类型的vector中。
isHorizonReductionAppropriate():根据一些情况,判断是否建议更短的Horizon。
registerG2OTypes():将为TEB定义的顶点和边注册到g2o::Factory。
例如,这允许用户将内部图形导出到文本文件。访问优化器()了解更多细节。
HomotopyClassPlanner
类简介
:
本地规划器,探索可选的同伦类,为每个可选类创建一个计划,最后返回当前最佳路径的机器人控件(在每个采样间隔中重复)
等价类(例如同伦)是利用搜索图来研究的。
对几个可能的候选项进行采样/生成,然后进行过滤,以便每个同伦类只保留一个候选项。
相关参考论文:
S. Bhattacharya et al.: Search-based Path Planning with Homotopy Class Constraints, AAAI, 2010
C. Rösmann et al.: Planning of Multiple Robot Trajectories in Distinctive Topologies, ECMR, 2015.
此处先不关注此类,有空再看。
========================================================
TebLocalPlannerROS
类简介
:
将teb_localplanner插件化,使之能被集成到ROS导航包中去。
私有属性
:
指向来自ros的costmap包装器的指针、指向costmap2d的指针、指向tflistener的指针、指向规划器接口的指针、障碍和viapoint序列、参数配置对象、全局规划的序列、各种mutex、目标位姿、一些状态量bool。
公有接口
:
TebLocalPlannerROS ():构造函数,初始化以上属性。
initialize ():创建roshandle句柄、创建动态参数配置、创建规划器实例、加载costmap插件、订阅障碍和viapoint信息。
setPlan():将ros中全局规划的序列传递到这个类中的全局规划序列中保存。
computeVelocityCommands():首先获得机器人当前位姿和速度,去掉当前位置前的全局规划,更新viapoints,判断是否到达全局终点,更新障碍,锁住cfg配置参数,调用planner进行规划,根据footprint检查可行性,获得速度命令,判断是否符合约束,速度命令到转向角转化(carlike),可视化轨迹、障碍等。
isGoalReached():返回是否到达目标的状态。
静态成员函数
tfPoseToEigenVector2dTransRot():将tf::Pose类型转换为包含平移速度和角速度的Eigen::Vector2d。平移速度(x坐标和y坐标)被组合成一个单一的平移速度(第一个分量)。
makeFootprintFromXMLRPC():从给定的XmlRpcValue设置footprint.
保护成员函数
updateObstacleContainerWithCostmap():根据costmap占有栅格更新障碍序列。note:All occupied cells will be added as point obstacles.
updateObstacleContainerWithCostmapConverter():从costmapConverter中提取并更新到障碍序列。
reconfigureCB():允许在线修改cfg参数。
pruneGlobalPlan():修改全局规划,全局规划器规划出的路径中机器人已经经过的位姿删去。
transformGlobalPlan():根据localcostmap地图大小,将此地图内的全局规划器的规划保存到transformed_plan中。transformed_plan所在的坐标系仍然为global_frames
estimateLocalGoalOrientation():估计位姿方向局部目标的位姿。将未来一段的规划的姿态角的平局值返回为估计的局部目标姿态。
saturateVelocity():若规划出来的速度超过限制速度,则令其等于最大限制速度。
convertTransRotVelToSteeringAngle():将旋转平移速度转换为车转角
========================================================
test_optim_node.cpp主程序