需要给kinova机械臂搭建一个抓取的环境,包括桌子,垫板,和相机(以及相机支架)
刚开始是直接用unit_box,调整大小来搭建一个桌子,和一个盖在桌子上的垫板。
结果发现颜色不好看(灰),而且还有重力,会造成板子的倾斜。感觉很不好用。
于是发现了另外一个建模方法:
在gazebo下拉菜单的Edit里面,点击model editor来进行建模。
进入之后是这样的界面:
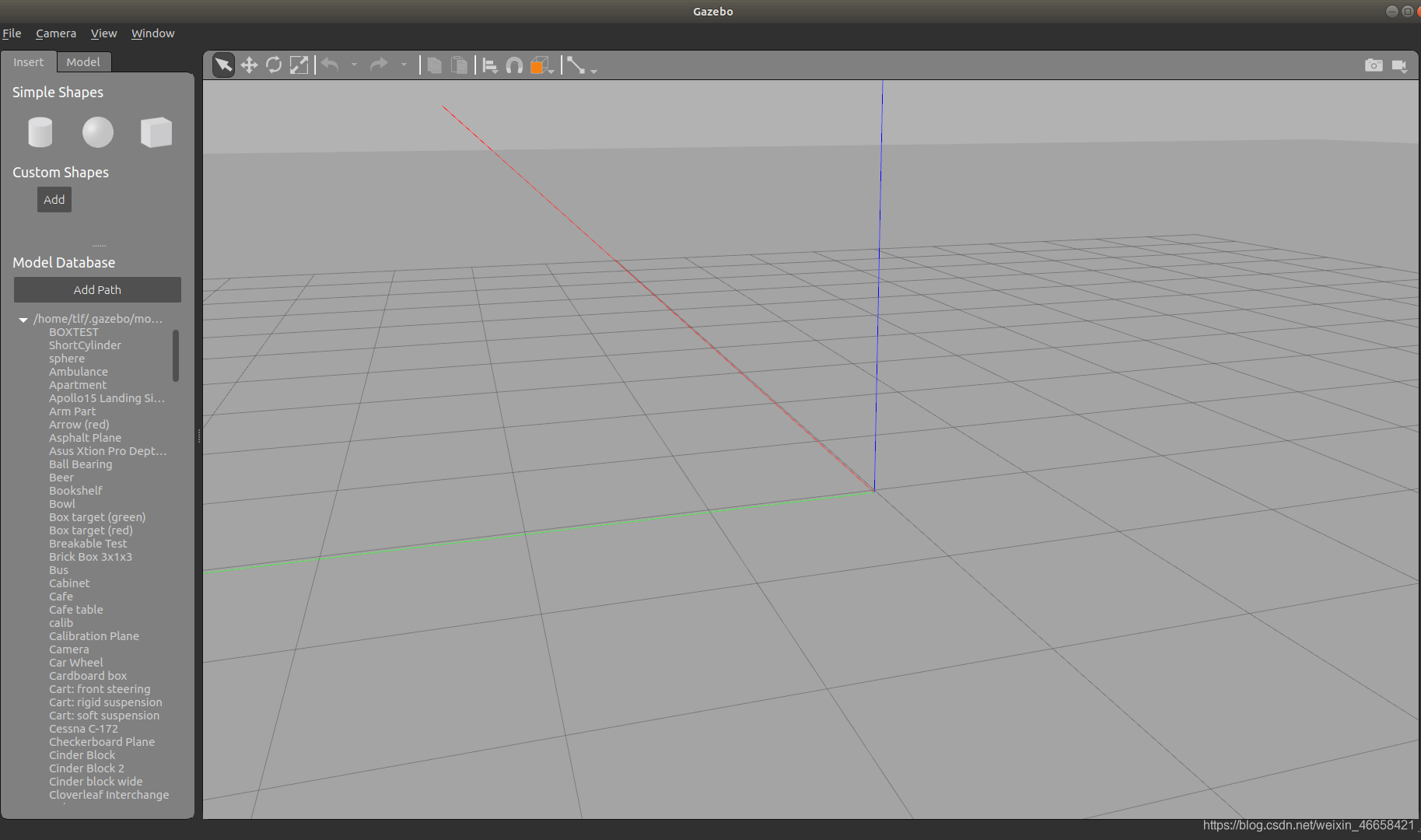
先以搭建桌子为例:点击Simple Shape中的正方体,放到世界场景中
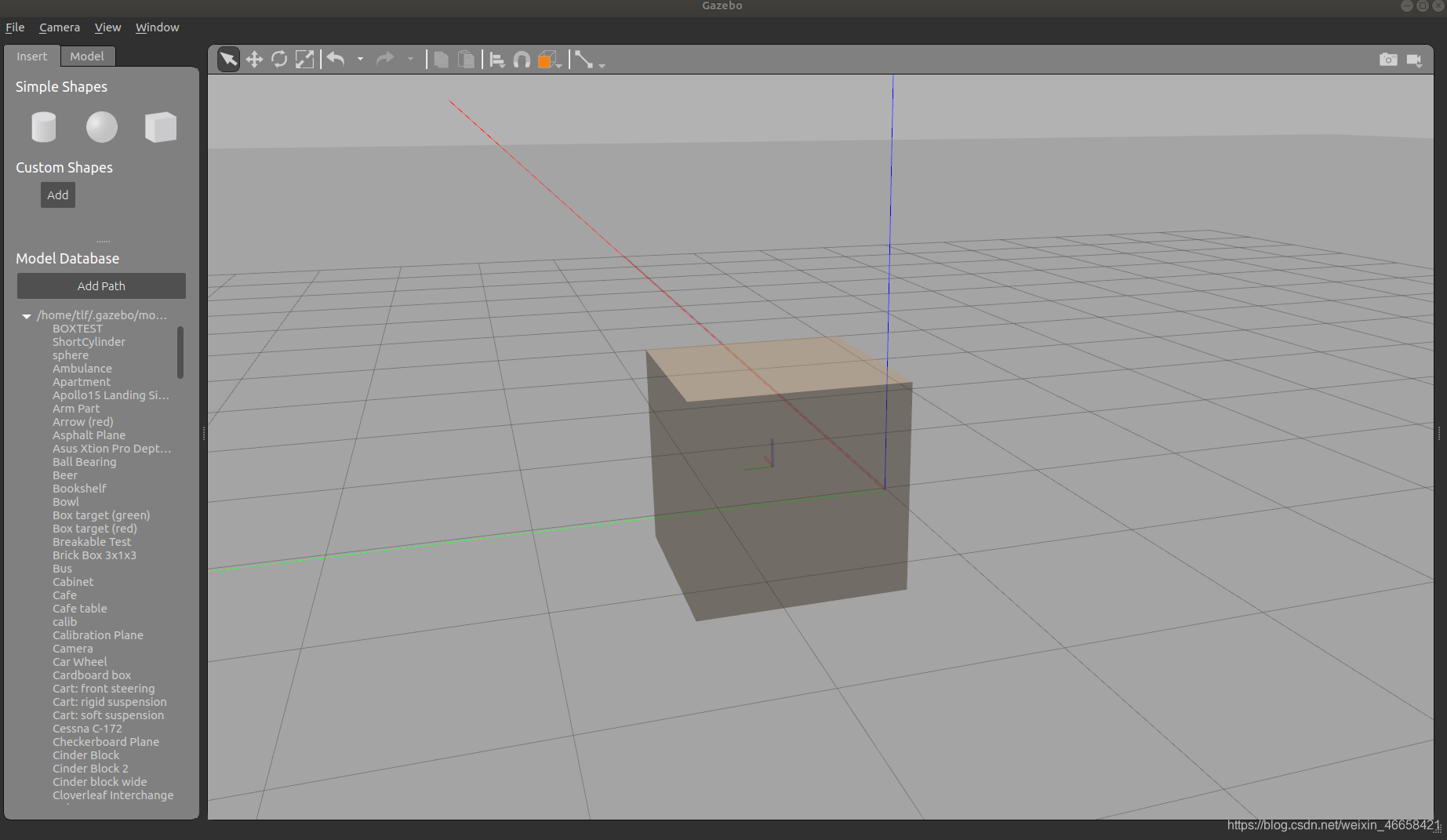
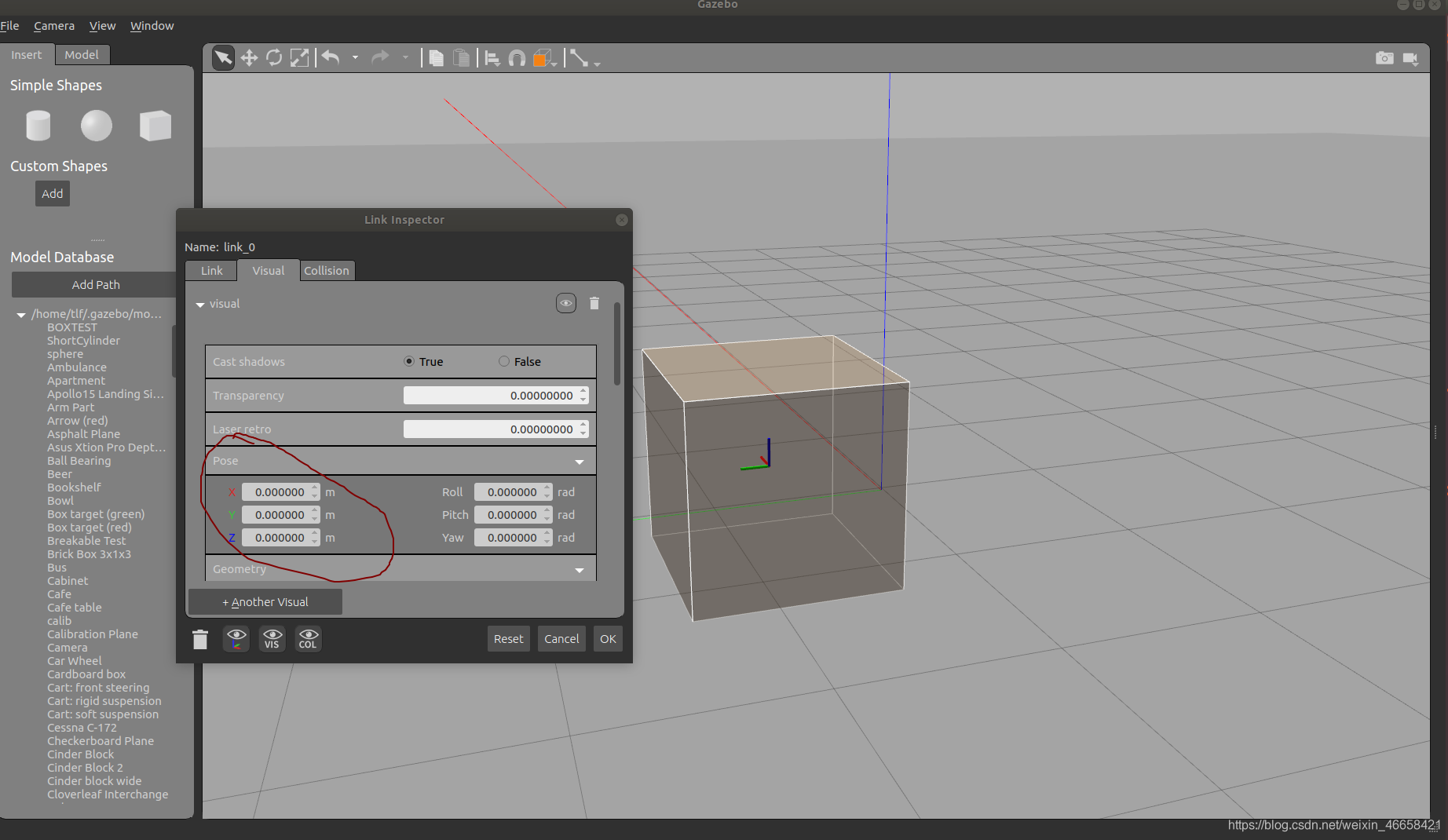
双击模型对其进行编辑:
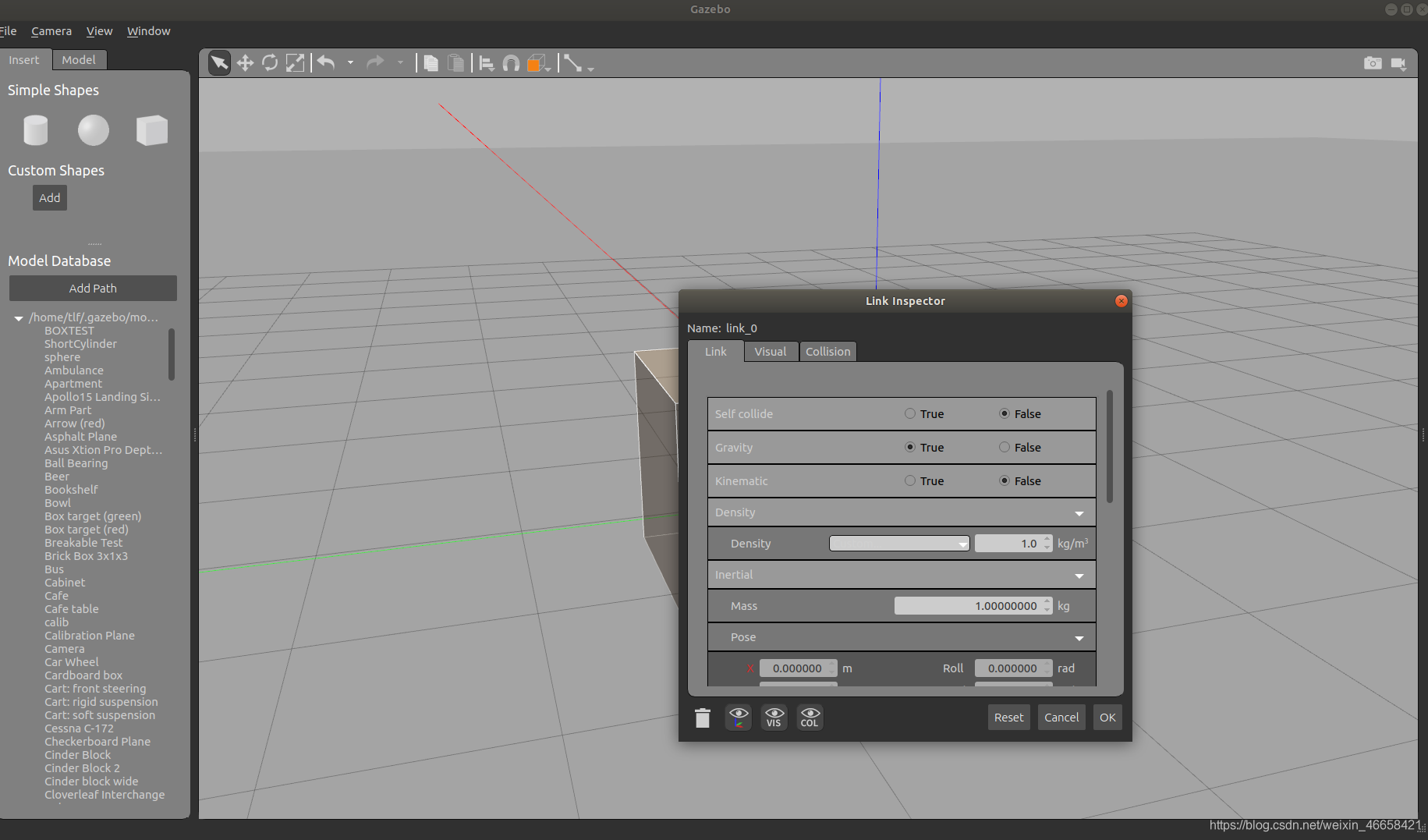
发现共有三个选项栏:
Link,Visual,Collision
像Link这里的话是可以设置是否有重力(gravity:true/false),Density密度可以在下拉框中选择相应的密度,
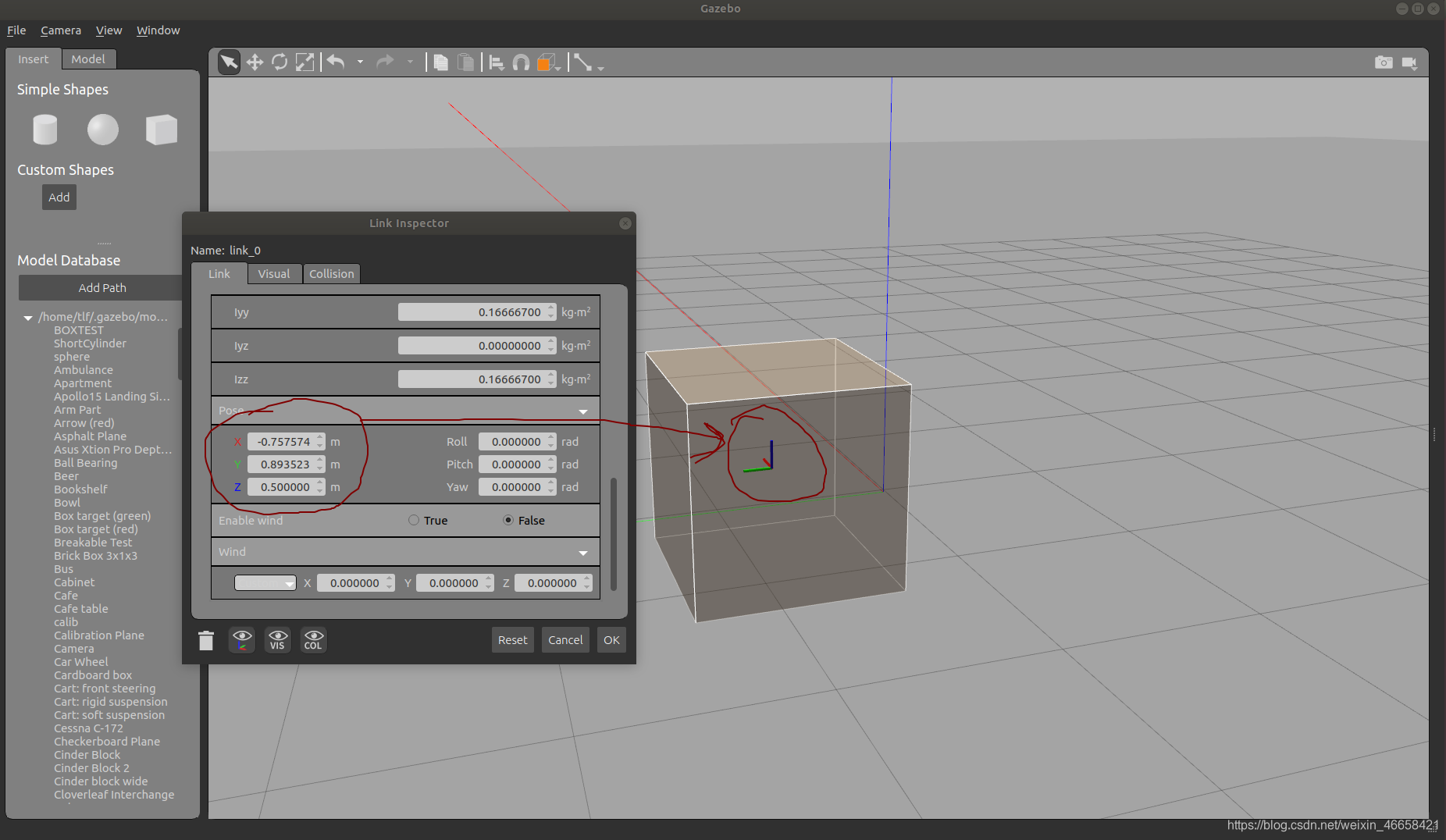
pose这里的(x,y,z)是link的坐标系位置,link的坐标系位置是基于世界坐标原点的
然后再看visual,visual主要是设置模型的实际视觉:
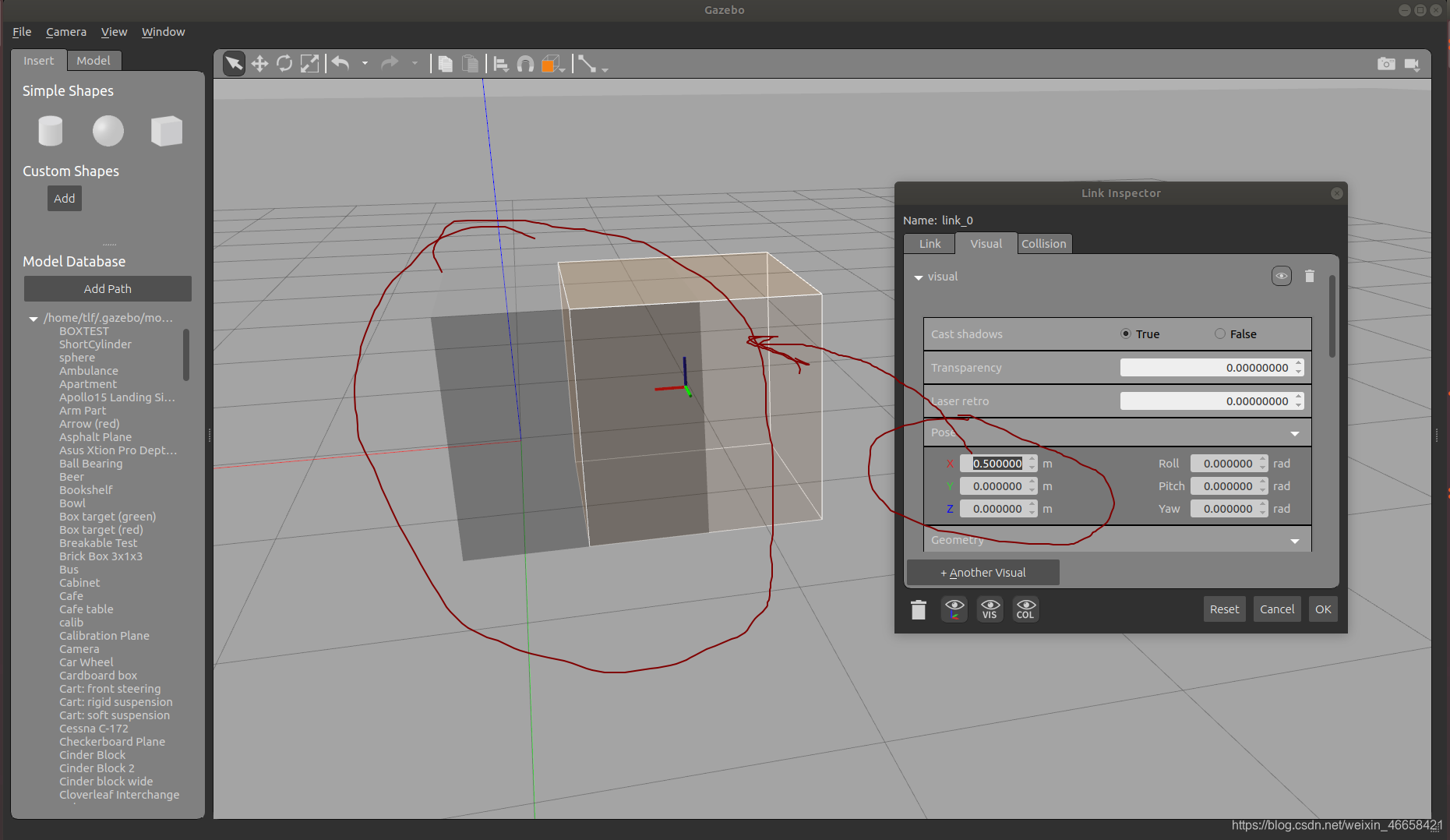
这里的pose是设置灰色部分的几何中心的坐标,这个坐标是相对于link的坐标系的。
可以看到,当设置x为0.5m时,灰色的(代表实际视觉部分)向x轴移动了0.5m
()圈1框里可以设置灰色的部分(实际视觉部分)的长宽高(x,y,z),圈2框里的可以通过改Name来设置视觉部分的颜色(比如可以改成:Gazebo/White,白色)
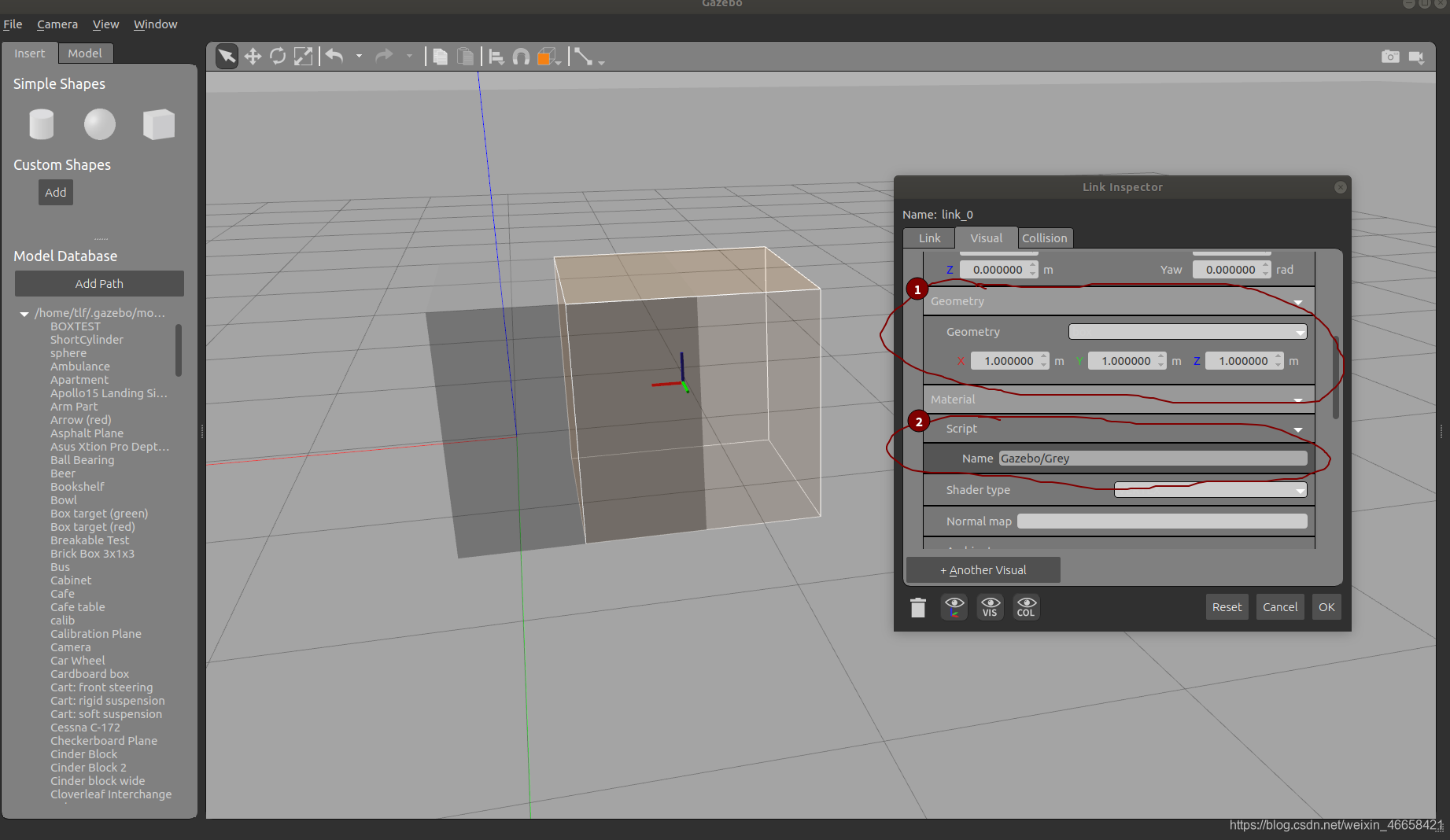
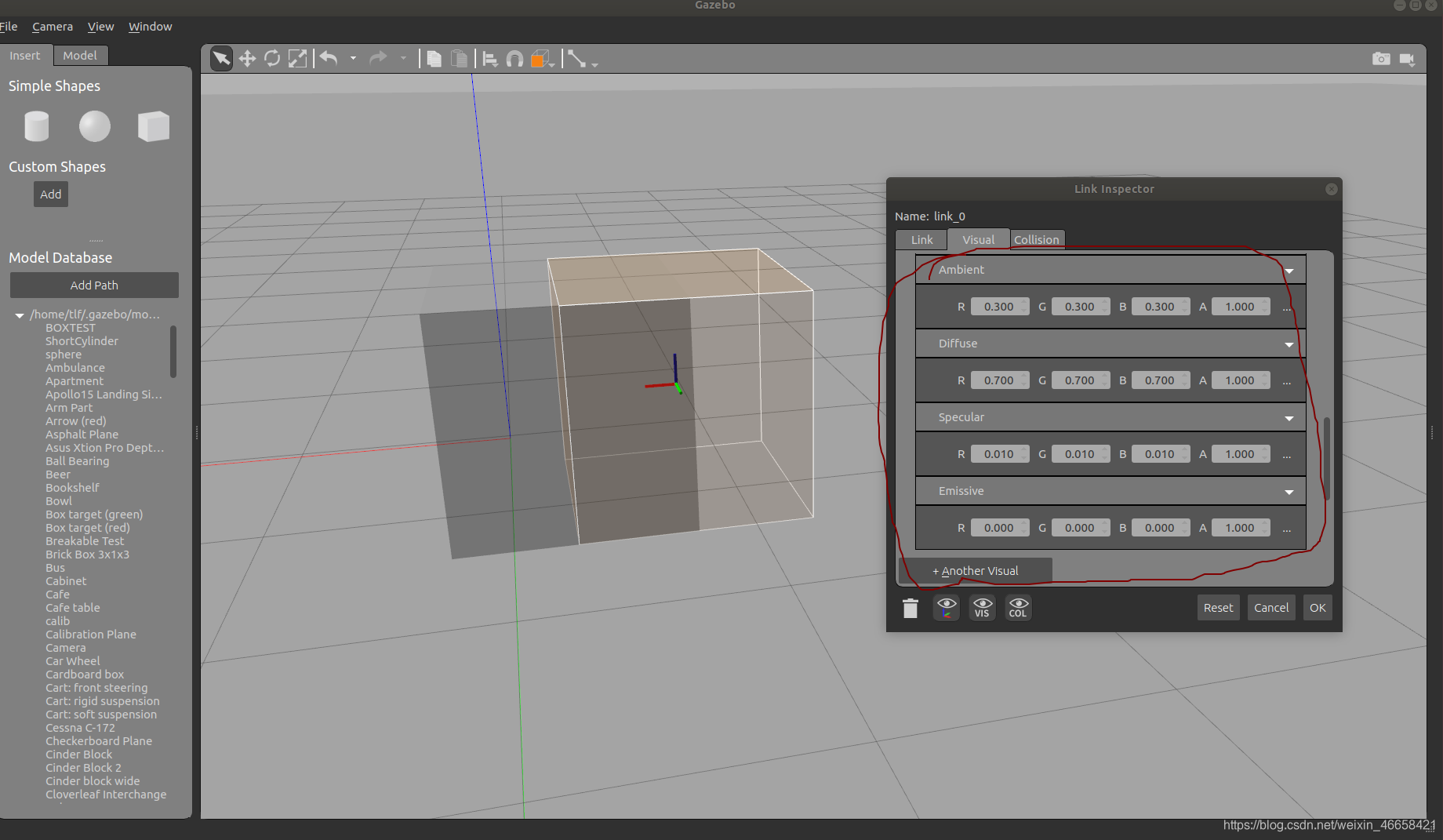
也可以通过设置下面这些框里面的数值来改变视觉(灰色)部分的颜色:RGBA,分别代表红,绿,蓝,不透明度,而Ambient,Diffuse,Specular,Emissive的具体含义参照这个链接:
【转载】Gazebo中为模型添加颜色和纹理_方小汪的博客-CSDN博客
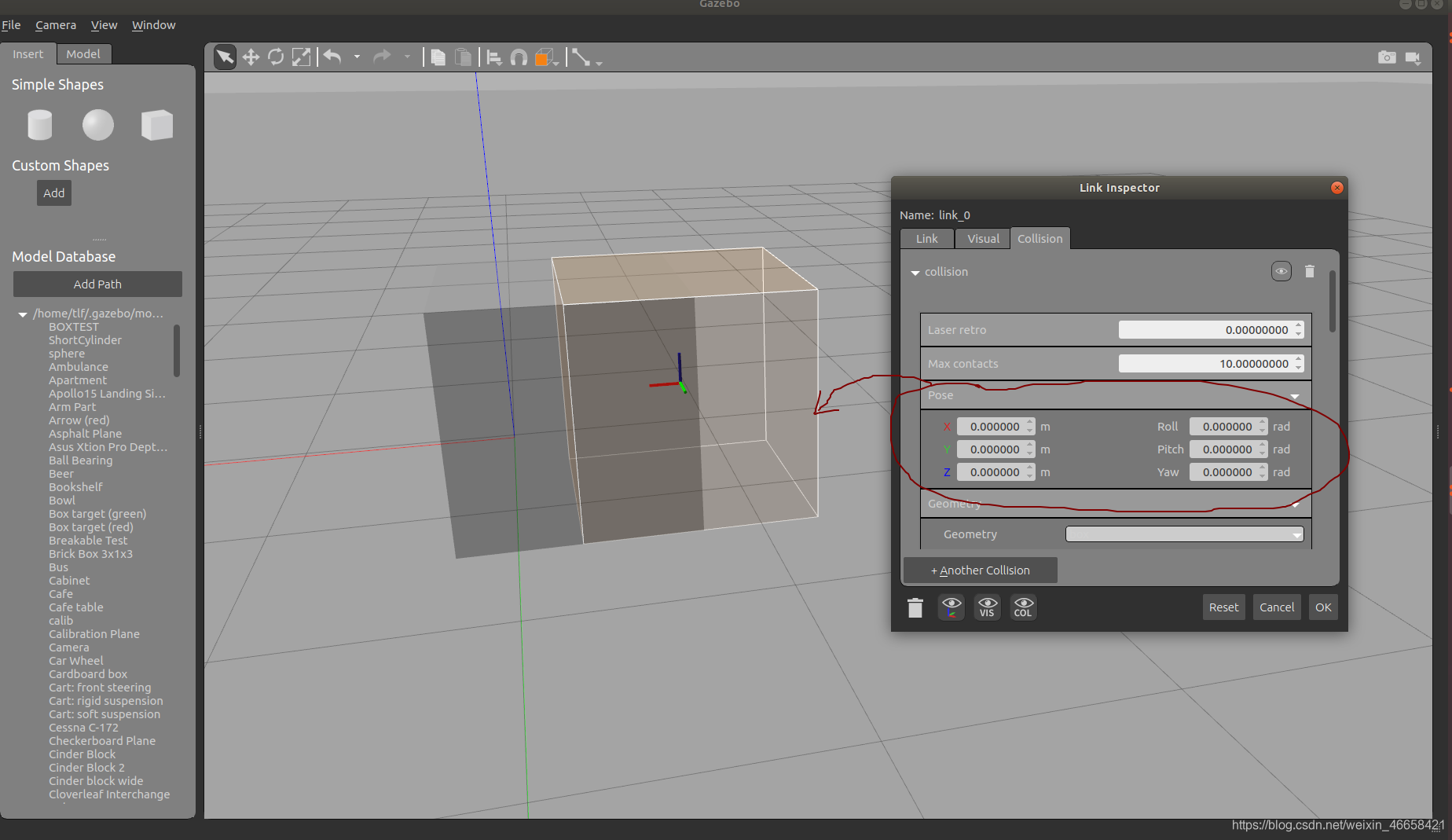
最后是Collision,代表碰撞体积,即图中橘黄色的部分:
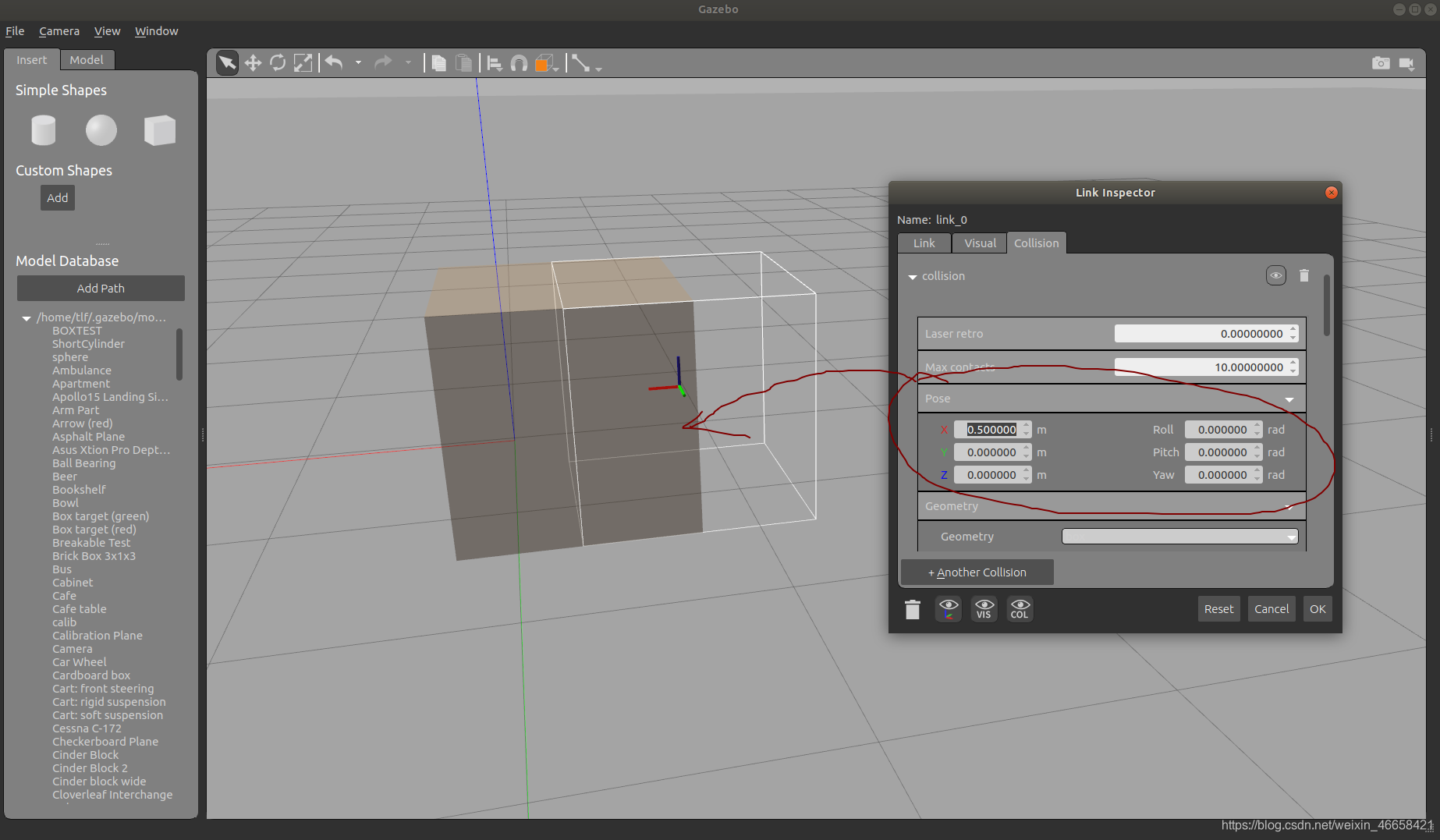
设置Pose的(x,y,z)可以改变橘黄色部分的几何中心的坐标,这个坐标也是基于link坐标系的
这里我将x的值又设置为了0.5m,可以看到橘黄色部分也向x轴方向移动了0.5m,和刚刚向x轴移动0.5m的灰色部分又重合了。
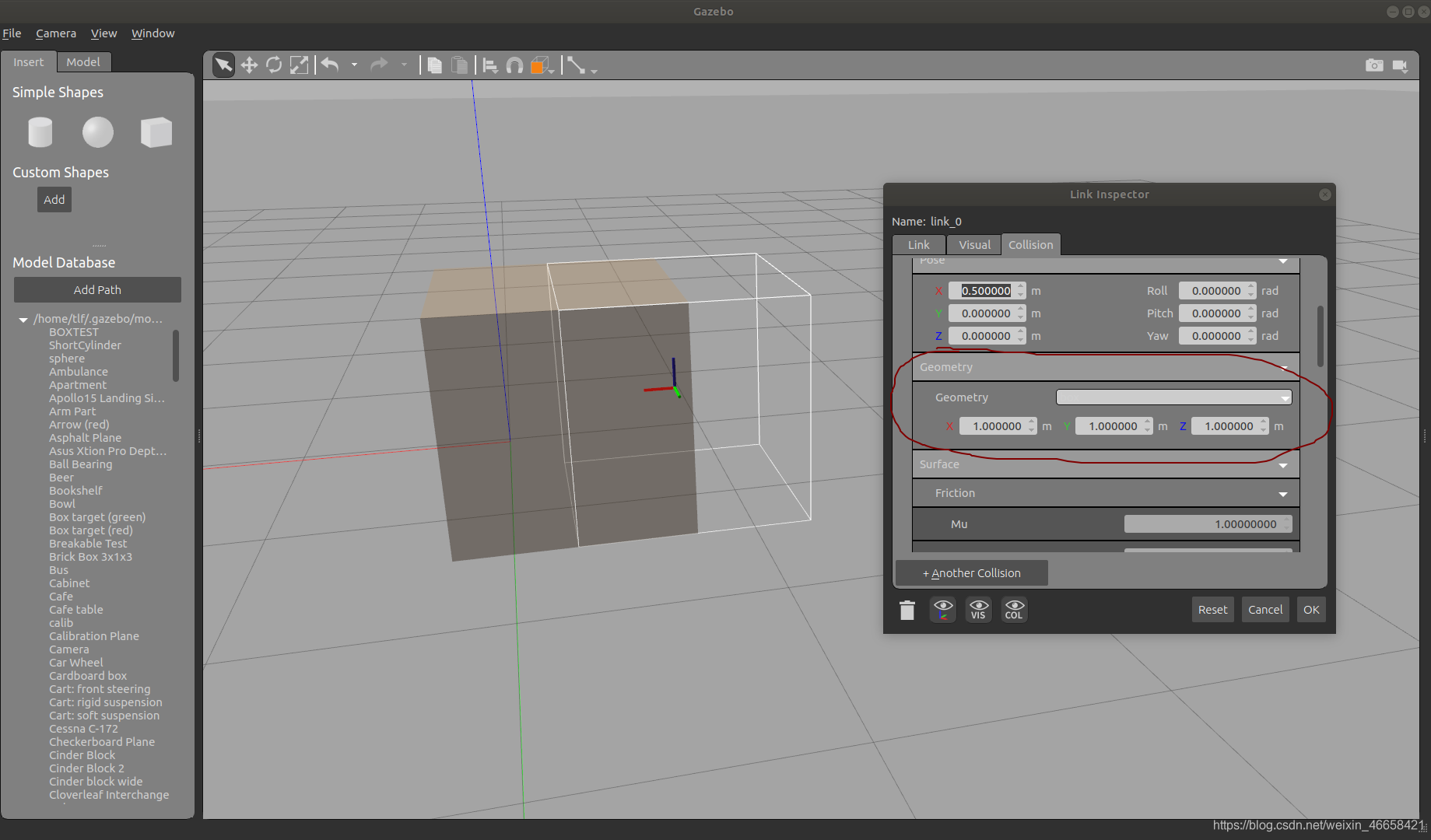
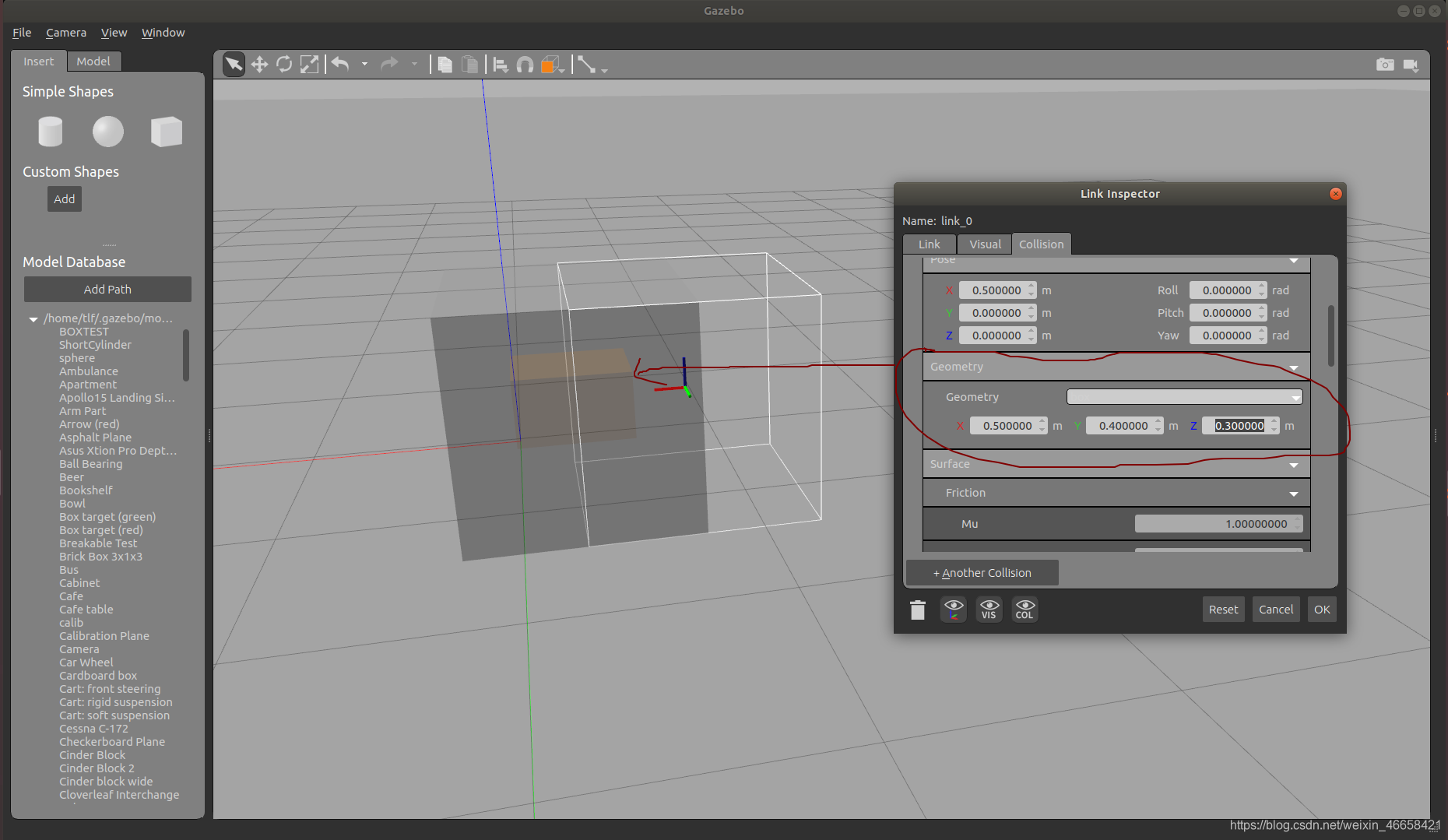
这里同理也是可以设置橘黄色部分的几何长宽高:
比如我设置长宽高为0.5,0.4,0.3:
建模完成后点击File-Exit Model Editor退出,并将已经建模的模型存放到自己指定的目录里面。
之后的模型已经加载到世界里面了。
可以通过右击模型-Edit Model来对已经建好的模型来进行编辑。