一、Resnet简介
深度残差网络(Residual Network, 简写为 ResNet)由微软研究院的Kaiming He等四名华人提出,通过使用ResNet Unit成功训练出了152层的神经网络,并在ILSVRC2015比赛中取得冠军,在top5上的错误率为3.57%,同时参数量比VGGNet低,效果非常突出。ResNet的结构可以极快的加速神经网络的训练,模型的准确率也有比较大的提升。
CNN网络自Alexnet的7层发展到VGG16-19层、Googlenet22层。当CNN网络达到一定深度后再一味地增加层数并不能带来性能提升,反而会收敛更慢,准确率变差。
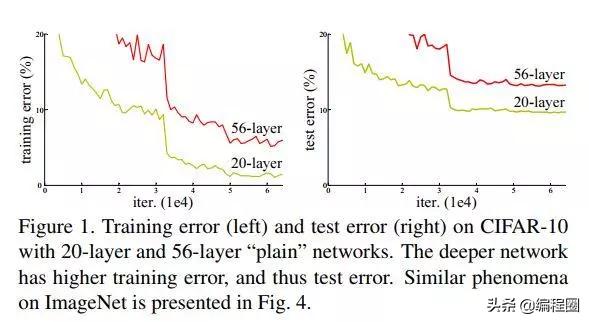
Resnet作者使用了residual representation残差的概念,使用多个有参层来学习输入输出之间的残差表示,而非像一般CNN网络那样使用有参层来直接尝试学习输入、输出之间的映射。当下Resnet已经代替VGG成为一般计算机视觉领域问题中的基础特征提取网络。
34层ResNet网络部分结构图:

二、TensorFlow2.0代码实现
- 数据集:CIFAR-10
- 测试环境:Google Colab
1. 初始化环境,选择TF2.0
try: # %tensorflow_version only exists in Colab. %tensorflow_version 2.xexcept Exception: pass
2. 导入包,加载数据集
import tensorflow as tffrom tensorflow import kerasfrom tensorflow.keras import layersimport numpy as npimport datetime as dt(x_train, y_train), (x_test, y_test) = tf.keras.datasets.cifar10.load_data()
3. 数据预处理
- 图片数值区域调整到[0,1]
- 集中裁剪图像到正常范围的75%
- 对中心轴随机翻转进行数据增强
train_dataset = tf.data.Dataset.from_tensor_slices((x_train, y_train)).batch(64).shuffle(10000)train_dataset = train_dataset.map(lambda x, y: (tf.cast(x, tf.float32) / 255.0, y))train_dataset = train_dataset.map(lambda x, y: (tf.image.central_crop(x, 0.75), y))train_dataset = train_dataset.map(lambda x, y: (tf.image.random_flip_left_right(x), y))train_dataset = train_dataset.repeat()valid_dataset = tf.data.Dataset.from_tensor_slices((x_test, y_test)).batch(5000).shuffle(10000)valid_dataset = valid_dataset.map(lambda x, y: (tf.cast(x, tf.float32) / 255.0, y))valid_dataset = valid_dataset.map(lambda x, y: (tf.image.central_crop(x, 0.75), y))valid_dataset = valid_dataset.repeat()
4. 使用TF2.0定义ResNet模型
def res_net_block(input_data, filters, conv_size): # CNN层 x = layers.Conv2D(filters, conv_size, activation='relu', padding='same')(input_data) x = layers.BatchNormalization()(x) x = layers.Conv2D(filters, conv_size, activation=None, padding='same')(x) # 第二层没有激活函数 x = layers.BatchNormalization()(x) # 两个张量相加 x = layers.Add()([x, input_data]) # 对相加的结果使用ReLU激活 x = layers.Activation('relu')(x) # 返回结果 return xinputs = keras.Input(shape=(24, 24, 3))x = layers.Conv2D(32, 3, activation='relu')(inputs)x = layers.Conv2D(64, 3, activation='relu')(x)x = layers.MaxPooling2D(3)(x)num_res_net_blocks = 10for i in range(num_res_net_blocks): x = res_net_block(x, 64, 3)# 添加一个CNN层x = layers.Conv2D(64, 3, activation='relu')(x)# 全局平均池化GAP层x = layers.GlobalAveragePooling2D()(x)# 几个密集分类层x = layers.Dense(256, activation='relu')(x)# 退出层x = layers.Dropout(0.5)(x)outputs = layers.Dense(10, activation='softmax')(x)res_net_model = keras.Model(inputs, outputs)- CIFAR-10维度是(32,32,3),我们基于中心点裁剪了75%,现在维度是(24,24,3)。
- 然后建立2个CNN层,输出维度filter分别是32、64.卷积核是3*3.
- res_net_block函数用来创建ResNet层
- 这个demo里 创建了10个ResNet层
- ResNet结束后,添加了几个层:CNN GAP DROUT等。
这个模型里进行了30次迭代,下面一个函数是替代函数,不使用resnet的版本:
def non_res_block(input_data, filters, conv_size): x = layers.Conv2D(filters, conv_size, activation='relu', padding='same')(input_data) x = layers.BatchNormalization()(x) x = layers.Conv2D(filters, conv_size, activation='relu', padding='same')(x) x = layers.BatchNormalization()(x) return x这里差别是没有残差的模块。
5. 训练
callbacks = [ # Write TensorBoard logs to `./logs` directory keras.callbacks.TensorBoard(log_dir='./log/{}'.format(dt.datetime.now().strftime("%Y-%m-%d-%H-%M-%S")), write_images=True),]res_net_model.compile(optimizer=keras.optimizers.Adam(), loss='sparse_categorical_crossentropy', metrics=['acc'])history =res_net_model.fit(train_dataset, epochs=30, steps_per_epoch=195, validation_data=valid_dataset, validation_steps=3, callbacks=callbacks)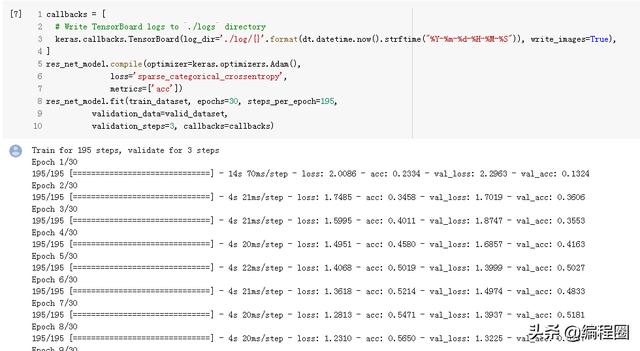
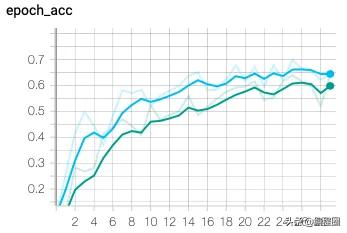
6. 打印准确度与损失函数
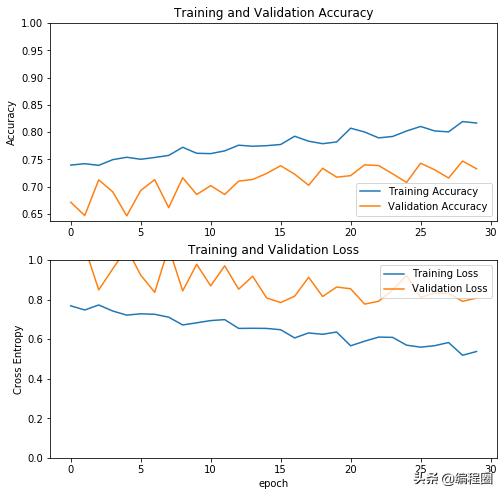
原文中的运行结果: