1、IMU校验
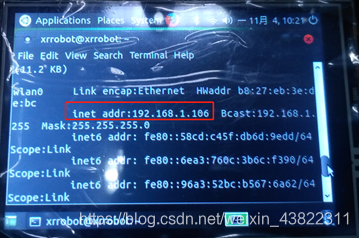
1)打开机器人,获取IP地址,因为机器人的IP地址是动态获取的,所以每次开机得到的IP地址可能不一样,例如上次机器人获得的IP为:192.168.1.104,今天来连接这个IP访问机器人已知访问不上,查看IP得知此次分配IP为:192.168.1.106,连接这个IP访问成功!(一会需要看看如何设置小车IP为固定IP,不会每次都改变)
2)在ubuntu中打开终端,输入:
vim ~/.bashrc
修改网络配置,修改后保存退出。(因为此处IP地址改变,所以必须线配置网络环境,否则连接访问不上机器人系统,若固定IP不变,则不需要此操作)

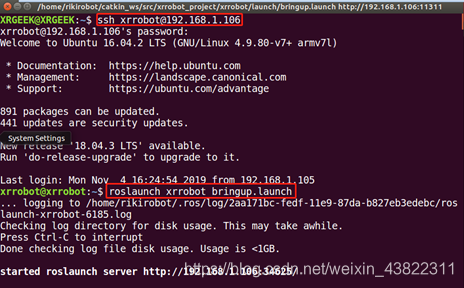
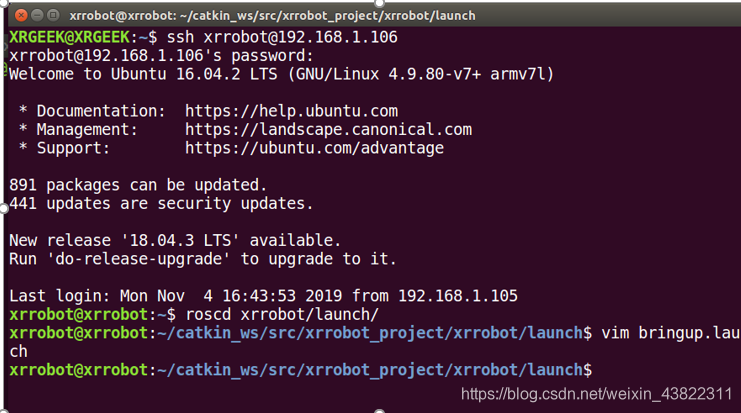
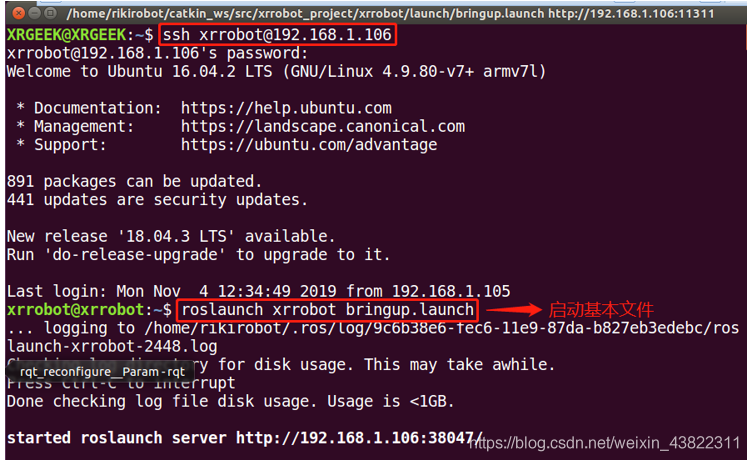
3)在Ubuntu中开启一个终端,远程登陆树莓派系统,然后启动基本文件;(此处之间在树莓派上直接启动基本文件应该也行得通)
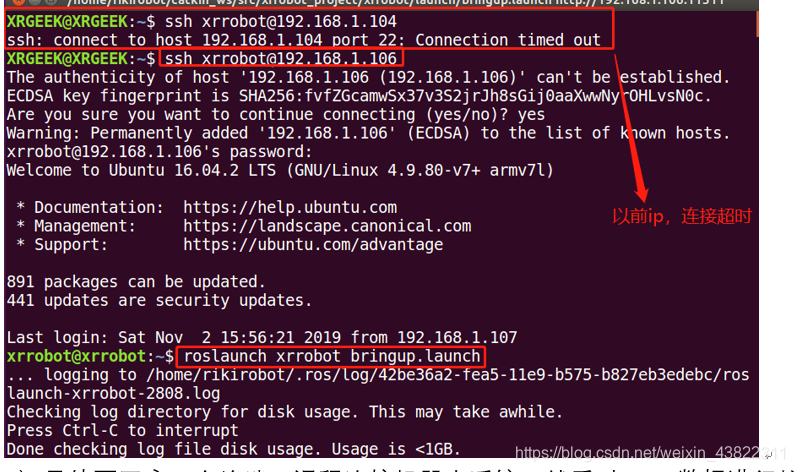
4)另外再开启一个终端,远程连接机器人系统,然后对IMU数据进行校验

注意:
1、此处一共有六组数据,分别是:X+,X-,Y+,Y-,Z+,Z-
2、校准需要一定的时间,每组数据校验完成都需要手动按Enter进入下一组数据的校准。
5)重启远程连接,查看校验结果

2、角速度校验
1)开启一个终端,远程登陆机器人系统,并运行启动基本文件
2)开启一个终端,远程登陆机器人系统,执行角速度校准脚本
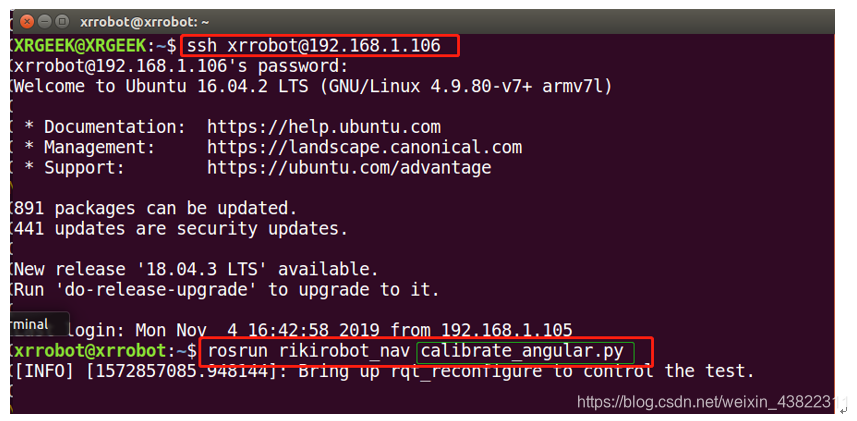
3)再开启第三个终端,不许远程登陆机器人系统,再本机上执行:
rosrun rqt_reconfigure rqt_reconfigure
,会出现校准界面

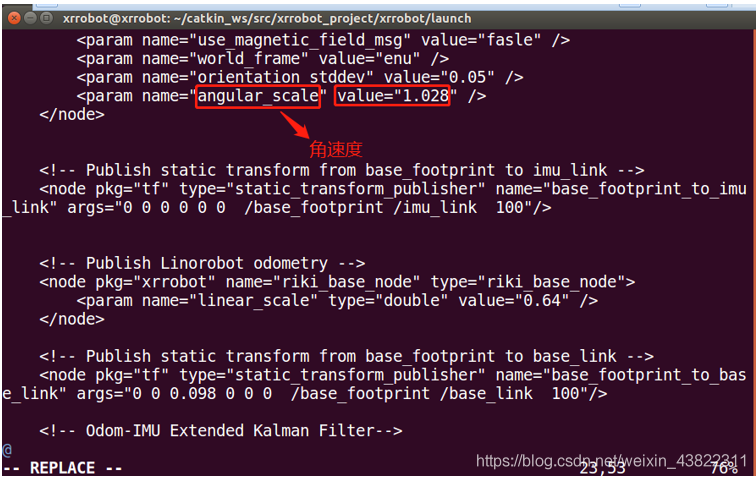
4)通过调节角速度比例,使实际转动角度与设定转动角度一样,然后将此比例写入
bringup.launch
文件中保存退出。
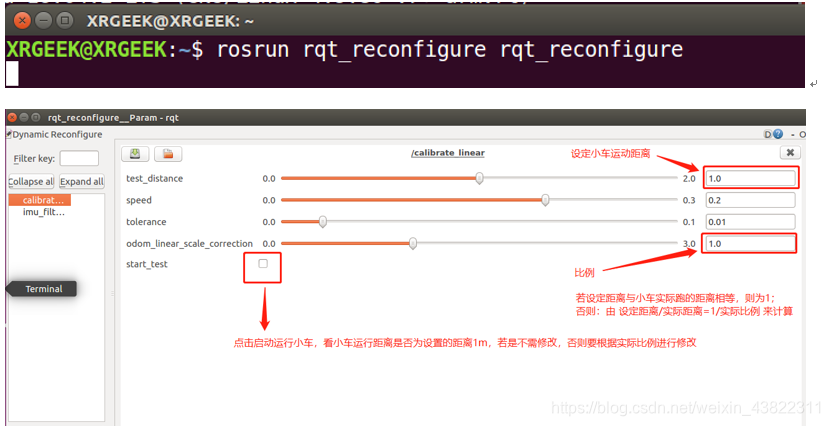
3、线速度校验
1)开启一个终端,远程登陆机器人系统,并运行启动基本文件
2)开启一个终端,远程登陆机器人系统,执行线速度校准脚本

3)再开启第三个终端,不许远程登陆机器人系统,再本机上执行:
rosrun rqt_reconfigure rqt_reconfigure
,会出现校准界面