?《嵌入式系统开发》系列专栏主要以LPC1100系列微控制器为硬件平台,详细介绍Cortex—-M0微控制器的原理与开发技术,基于keil仿真软件平台设计最小应用系统板和具有在板仿真器的口袋开发板以及相关例程。
?本文已收录于嵌入式系统开发系列专栏:嵌入式系统开发 欢迎订阅,持续更新。
[嵌入式系统开发]利用系统节拍定时器实现LED灯闪烁详细教程及完整代码
本文目录
1.要求
在Keil MDK 4.74上编写一段程序,利用系统节拍定时器SysTick实现定时1s,控制LPC1114微控制器的GPIO引脚PIO1_9状态反转(BLINKY指示灯闪烁,周期为2s),比较一下与Delay_1s()函数实现1s的定时的异同点,尝试用不同的方法(改变中断次数或者每次中断的时间)改变LED灯闪烁的频率,观察LED灯的闪烁情况。
参考子程序:
1.1初始化:
void LED_Init(void) {
LPC_SYSCON->SYSAHBCLKCTRL |= (1UL << 6); /*enable clock for GPIO*/
LPC_GPIO1->DIR |= (1UL << 9); /*configure GPIO1_9 as output*/
}
1.2LED灯状态翻转:
void LED_Toggle(void) {
LPC_GPIO1->DATA ^= (1UL <<9); /* Toggle the BLINKY LED */
}
2.完整代码
2.1主程序
/*----------------------------------------------------------------------------
MAIN function
*----------------------------------------------------------------------------*/
int main (void) { /* 主程序 */
SysTick_Config(SystemCoreClock/100); /* 定时10ms */
LED_Init(); /* LED初始化 */
while (1) { /*循环 */
if(clock_1s){ /*判断*/
clock_1s = 0; /*标志*/
LED_Toggle(); /*状态翻转*/
}
}
}
2.2SysTick
中断服务子程序
void SysTick_Handler (void) { /*定义中断函数的入口地址·*/
static unsigned long ticks; /*定义变量*/
if (ticks++ >= 99) { /* 定时10ms循环100次 */
ticks = 0;
clock_1s = 1; /*设置标志 */
}
}
2.3Blinky.c文件
/*Blinky.c文件*/
#include "LPC11xx.h" /* LPC11xx definitions */
extern volatile unsigned char clock_1s;
void SysTick_Handler (void) { /*定义中断函数的入口地址·*/
static unsigned long ticks;
if (ticks++ >= 99) { /* Set Clock1s to 1 every 1 second 定时10ms循环100次 */
ticks = 0;
clock_1s = 1; /*设置标志 */
}
}
void LED_Init(void) {
LPC_SYSCON->SYSAHBCLKCTRL |= (1UL << 6); /*enable clock for GPIO*/
LPC_GPIO1->DIR |= (1UL << 9); /*configure GPIO1_9 as output*/
}
void LED_Toggle(void) {
LPC_GPIO1->DATA ^= (1UL <<9); /* Toggle the BLINKY LED */
}
/*----------------------------------------------------------------------------
MAIN function
*----------------------------------------------------------------------------*/
int main (void) { /* Main Program */
SysTick_Config(SystemCoreClock/100); /* Generate IRQ each ~10 ms
定时10ms */
LED_Init(); /* LED Initialization */
while (1) { /* Loop forever */
if(clock_1s){
clock_1s = 0; /*标志*/
LED_Toggle();
}
}
}
2.4IRQ.c文件
/*----------------------------------------------------------------------------
* Name: IRQ.C
* Purpose: IRQ Handler
* Note(s):
*----------------------------------------------------------------------------
* This file is part of the uVision/ARM development tools.
* This software may only be used under the terms of a valid, current,
* end user licence from KEIL for a compatible version of KEIL software
* development tools. Nothing else gives you the right to use this software.
*
* This software is supplied "AS IS" without warranties of any kind.
*
* Copyright (c) 2010 Keil - An ARM Company. All rights reserved.
*----------------------------------------------------------------------------*/
#include "LPC11xx.h" /* LPC11xx definitions */
volatile unsigned short AD_last; /* Last converted value */
volatile unsigned char clock_1s; /* Flag activated each second */
/* Import function for turning LEDs on or off */
extern void LED_Out (unsigned int num);
/*----------------------------------------------------------------------------
A/D IRQ: Executed when A/D Conversion is done
*----------------------------------------------------------------------------*/
void ADC_IRQHandler(void) {
unsigned int ADC_reg;
ADC_reg = LPC_ADC->STAT; /* Read ADC status clears interrupt */
ADC_reg = LPC_ADC->GDR; /* Read conversion result */
AD_last = (ADC_reg >> 6) & 0x3FF; /* Store converted value */
}
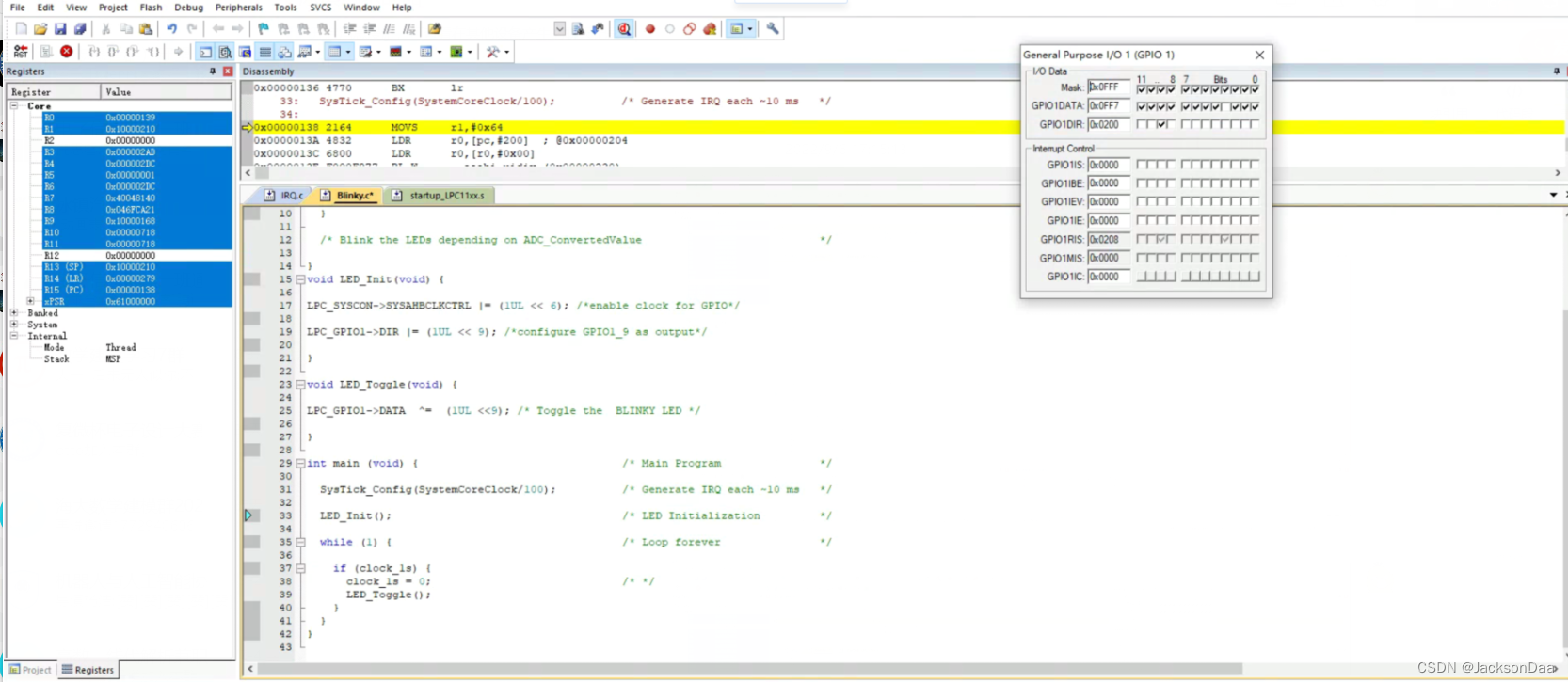
3.编译通过图片

4. 调试运行结果的图片
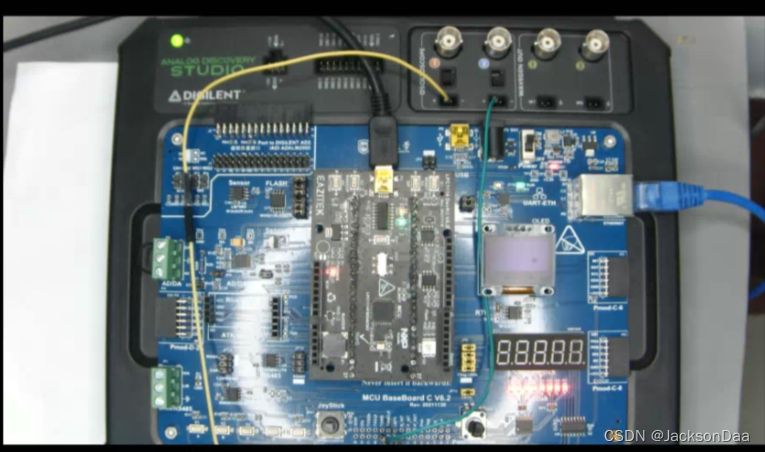
4.1LED 灭
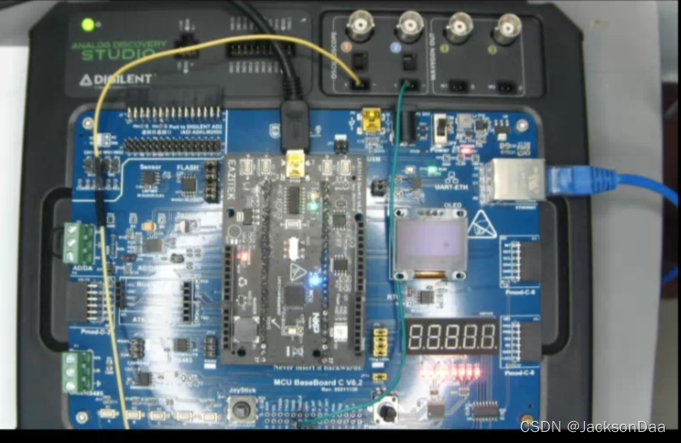
4.2LED亮

4.3波形图

5.总结
此实验利用系统节拍定时器
SysTick
实现定时
1s
,控制
LPC1114
微控制器的
GPIO
引脚
PIO1_9
状态反转(
BLINKY
指示灯闪烁,周期为
2s
)如此一直循环,实现
LED
灯闪烁
?《嵌入式系统开发》系列专栏主要以LPC1100系列微控制器为硬件平台,详细介绍Cortex—-M0微控制器的原理与开发技术,基于keil仿真软件平台设计最小应用系统板和具有在板仿真器的口袋开发板以及相关例程。
?本文已收录于嵌入式系统开发系列专栏:嵌入式系统开发 欢迎订阅,持续更新。