目录
前言
前面的3篇文章依次介绍了微分跟踪器TD、状态观测器ESO和非线性状态误差反馈NLSEF三部分内容,至此ADRC的结构已经介绍完毕,现在对分块学习的内容进行整合,并进行实例仿真分析,ADRC分解学习博客链接:
自抗扰控制ADRC之三种微分跟踪器TD仿真分析_Mr. 邹的博客-CSDN博客
自抗扰控制ADRC之扩张观测器_Mr. 邹的博客-CSDN博客
自抗扰控制ADRC之反馈控制律(NLSEF)_Mr. 邹的博客-CSDN博客
1.ADRC形式
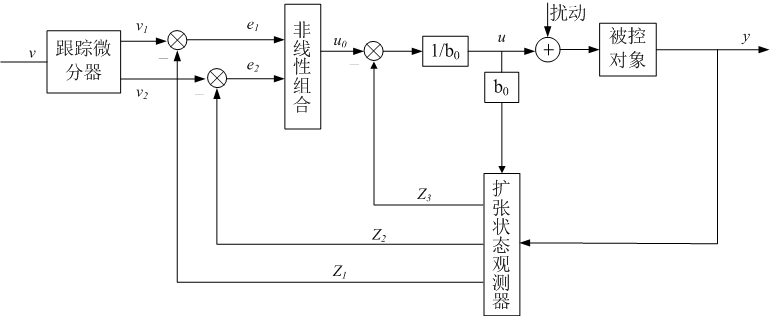
由于反馈控制的形式有两种,所以对应的ADRC有两种,
1.1形一
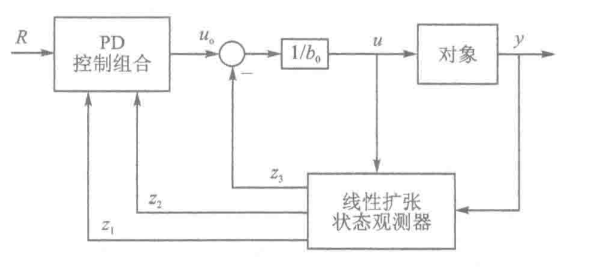
1.2形二
注:
①如果
未
将b0写入扩张观测器内部,则传入控制ESO的u要乘b0(上述两图便展示如此);如果将b0写入扩张观测器内部,则传入控制ESO的u不需要乘b0,这是很容易误导的一个地方。所以有的文献中也会构建不要b0传入ESO:
②为什么有的地方直接将b0写成b?是因为大多数情况系统若不考虑参数b的摄动,相当于已知b,所以将b代替b0可以补偿和估计的更为准确。
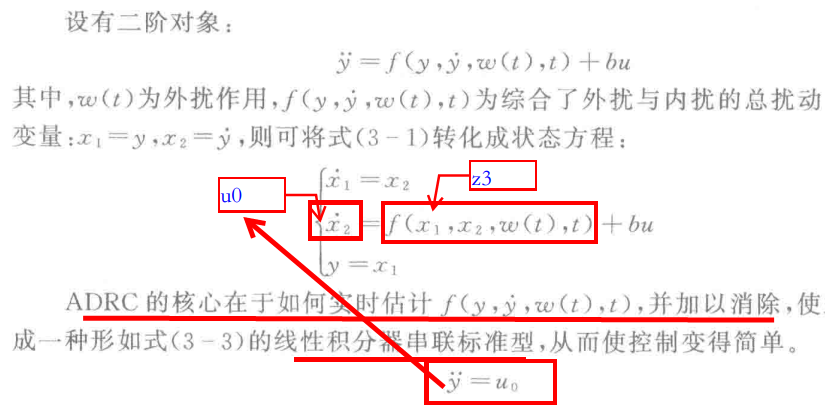
2.被控对象
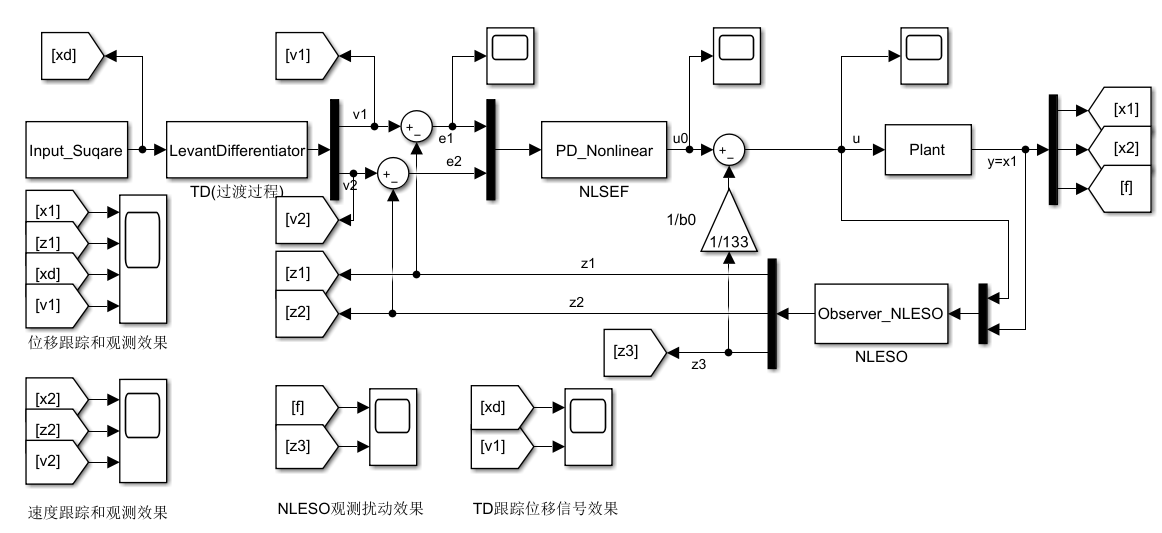
取f = -25×2+33sin(Πt),b=133。
3.仿真分析
3.1仿真模型
微分跟踪器:Levant
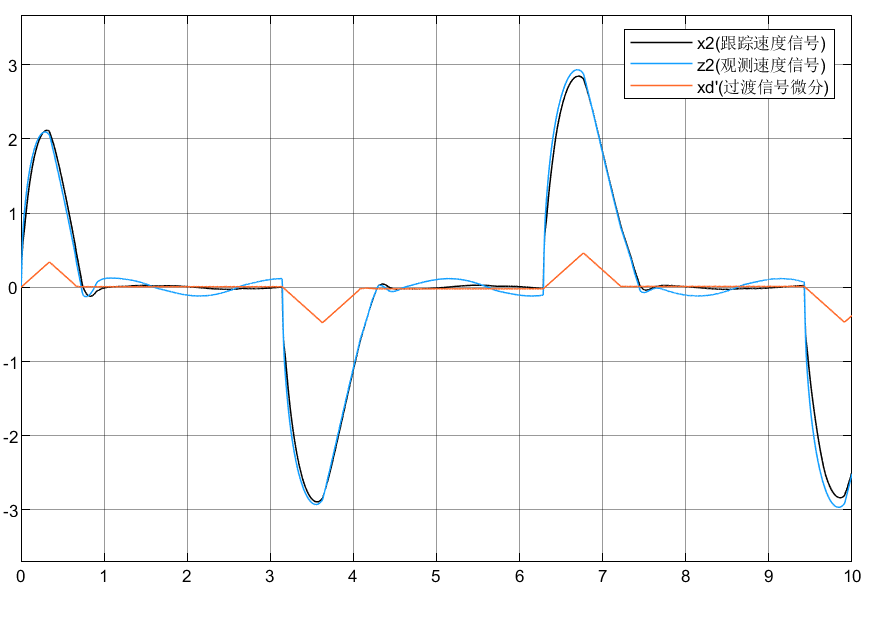
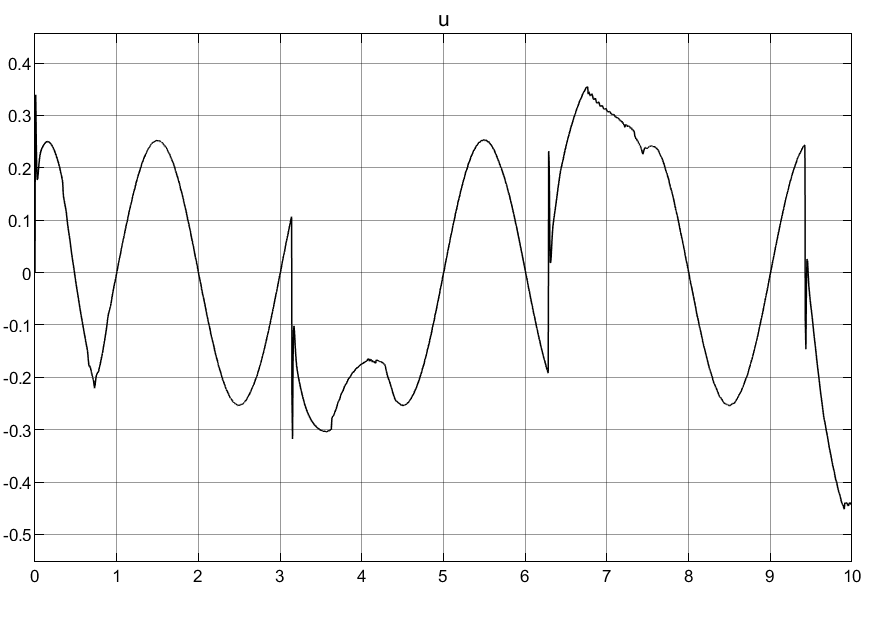
3.2仿真结果
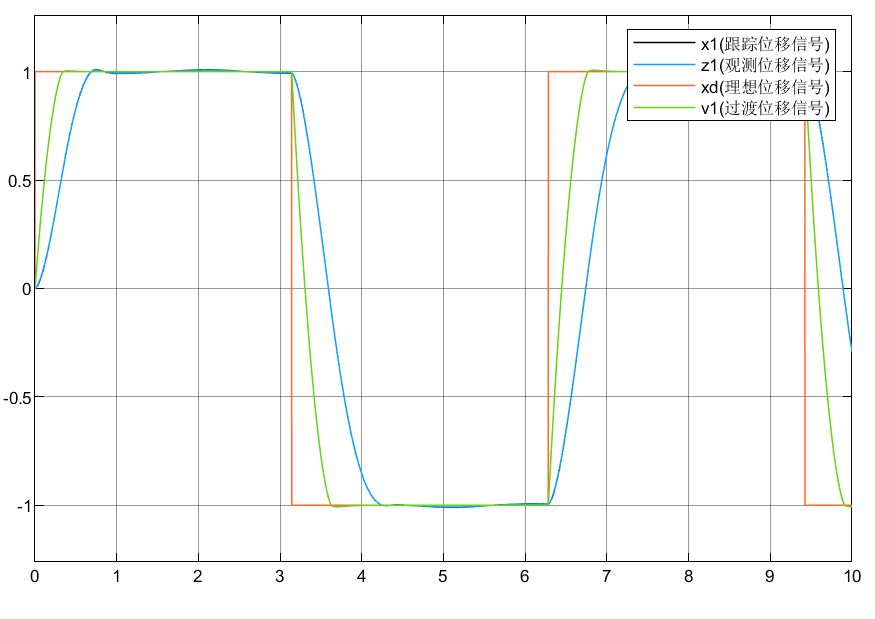
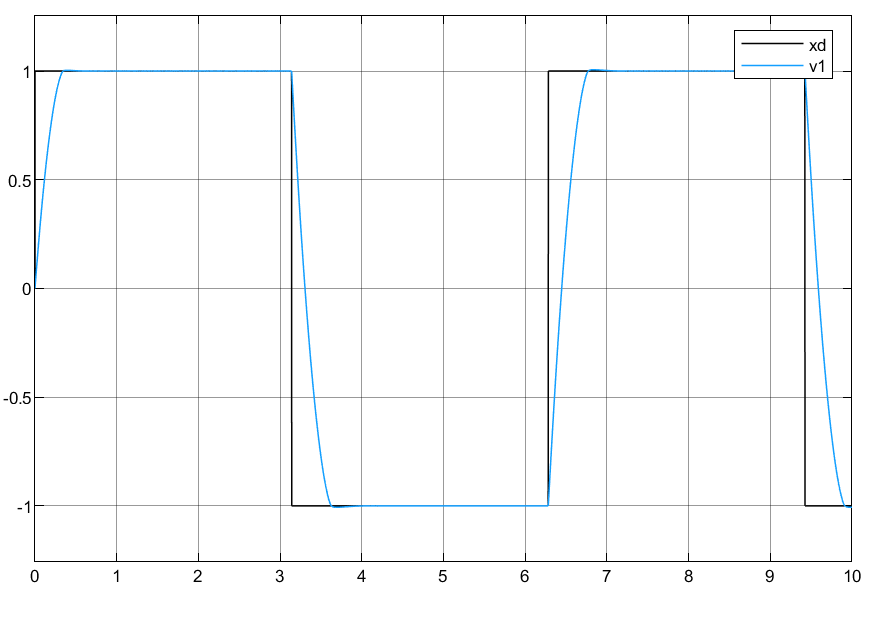
以方波作为输入,其仿真效果如下所示:
4.学习问题
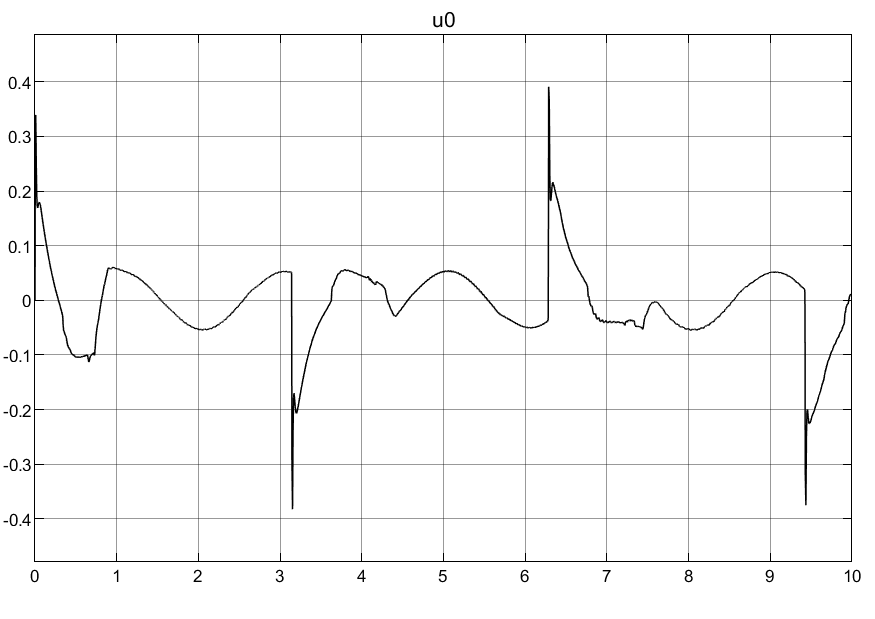
①参数的调节还没学到位,后续还需学习总结;
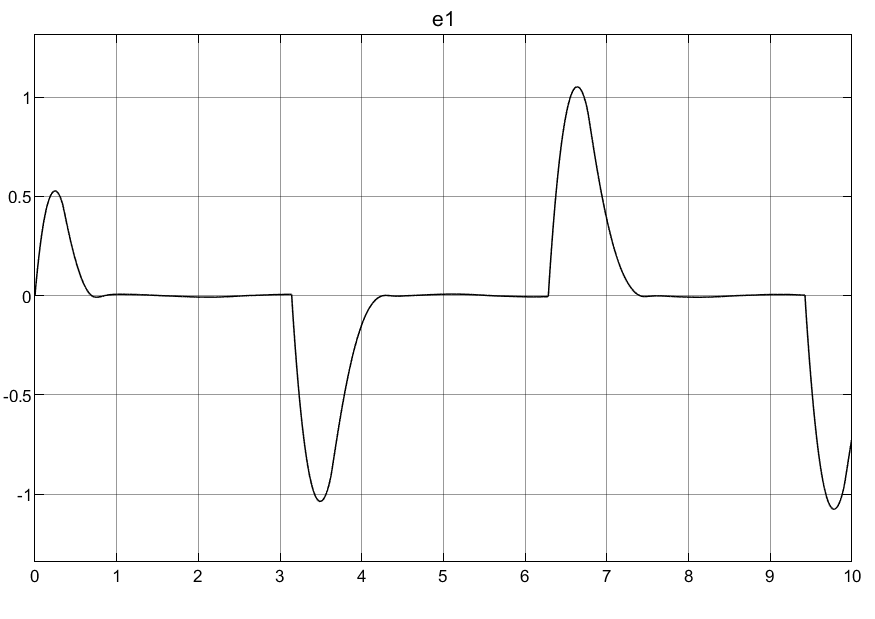
②实际上跟踪的效果并不算很好;
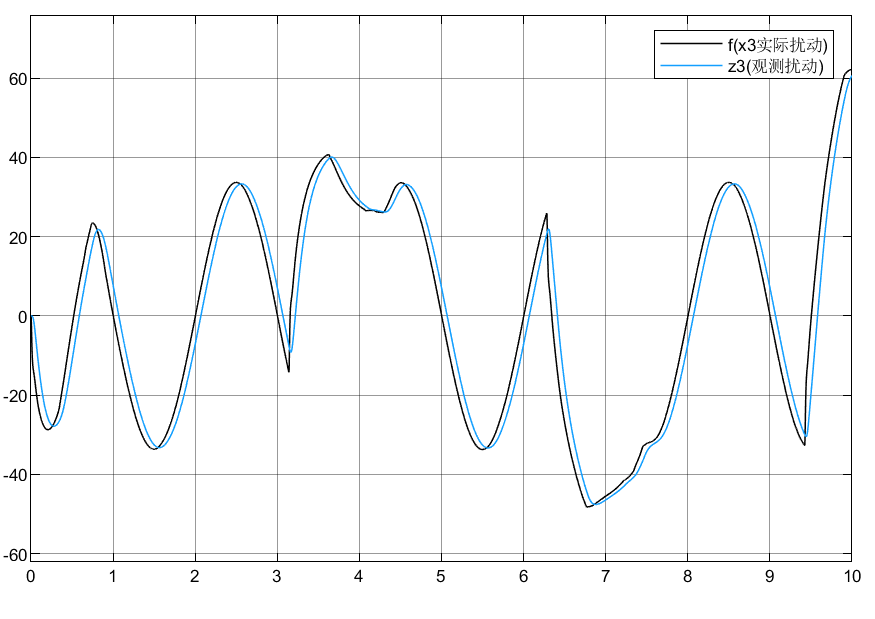
③非线性观测器的效果并非很好;
④误差变化律e2的跟踪非常差,在滑模控制中很少出现: