时序逻辑概述
##1、 组合逻辑电路&&时序逻辑电路
(1)组合逻辑电路:任何一个时刻,输入信号仅取决于当时的输入信号
(2)时序逻辑电路:不仅取决于当时的输入信号,还取决于电路原本的工作状态
2、时序逻辑电路的组成
(1)组合电路
组合电路最少一个输出必须反馈到存储电路的输入端
(2)存储电路—记忆以前的输入和输出
1)存储电路由触发器构成,也可以由带有反馈的组合电路构成
2)存储电路的状态至少有一个作为组合逻辑电路的输入,与其他输入信号共同决定电路的输出

x为输入信号,z为输出信号,y为状态信号,w为驱动信号
3、时序电路的分类
(1)同步时序逻辑电路
存储电路状态是靠时钟脉冲同步更新的
(2)异步时序逻辑电路
存储电路中,有的有时钟脉冲作用,有的没有时钟脉冲作用
即使在有时钟脉冲作用的存储电路中,存储器的更新也不是同步进行的
(3)米里型
输出信号不仅取决于存储电路的状态,而且取决于输入变量
(4)摩尔型
输入状态只取决于存储电路的状态,是米里型的一个特例
时序逻辑电路分析
1、时序逻辑电路分析步骤
(1)写出存储电路(触发器)的驱动方程
(2)写出存储电路的状态转移方程
(3)由状态转移方程/输出函数表达式,列出状态转移表/划出状态转移图
(4)画出工作波形(时序图)
寄存器、移位寄存器
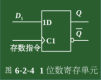
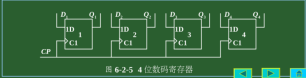
1、数码寄存器
数码寄存器是能存放二进制数码的电路,由于触发器具有记忆功能,因而可以作为数码寄存器电路
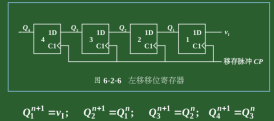
2、移位寄存器
具有移位(左移、右移、双向)功能的寄存器
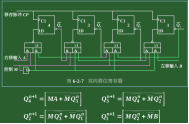
M=0左移,M=1右移
移位寄存器的应用
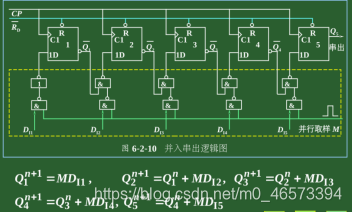
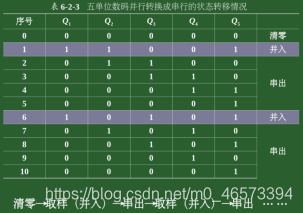
(1)串行转并行
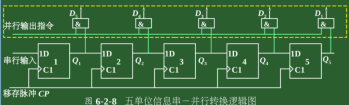
(2)并行转串行
Q5=1不影响,Q5^n+1=Q4+D15,与Q5无关
(3)脉冲节拍延迟
由于移位寄存器串行输入、串行输出时,输入信号经过n级移位寄存后才到输出端输出。因此输出信号延迟了n个移存脉冲才到达输出端输出,因此输出信号比输入信号延迟了n个移存脉冲的周期,这样就起到节拍延迟的作用。
(4)构成计数分频器、序列信号发生器
同步计数器
数字电路中使用最多的时序电路
1、作用:用来对时钟脉冲计数,也可以做定时、分频、执行数字运算
2、分类
(1)计数脉冲引入方式:同步计数器、异步计数器
(2)数字增减趋势:加法计数器、减法计数器、可逆计数器
(3)计数器数模值:二进制计数器、非二进制计数器
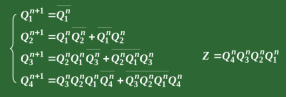
1、同步二进制计数器
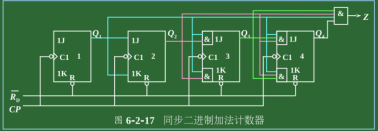
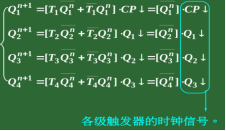
状态转移方程:
2、二进制同步加/减计数器
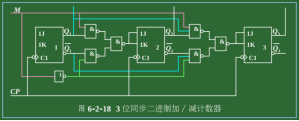
1、M=1,进行加法计数,M=0,进行减法计数
2、M=0时,高位输入端的信号由低位触发器Q端引出;M-1时,高位输入信号由低位触发器~Q输入
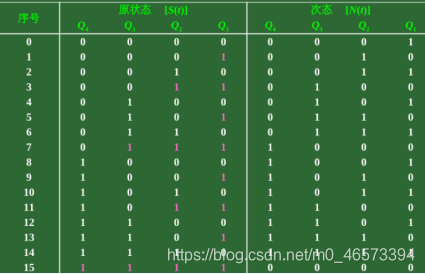
3、二—十进制计数器
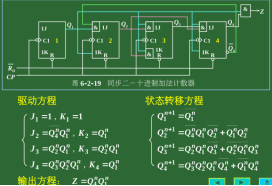
1、偏离状态:1010、1011、1100、1101、1110、1111,正常工作时不会出现,若计数器受到某种干扰,会错误地进入偏离状态
2、自启动性:偏离状态下自动转入有效序列的特性
3、输出信号Z是十进制计数器的进位信号,输出信号的周期恰好为输入计数脉冲CP周期的10倍,因此输入信号也可以视为输入计数脉冲CP的十分频信号,因而模10计数器也可以看成十分频器
4、集成同步计数器
(1)CT54161/CT74161(CT54160/CT74160) 【重点】
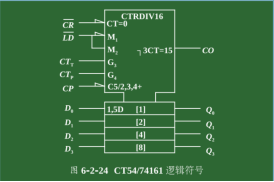
(背逻辑符号、功能表和引脚)
~CR端:清零端 ~LD:置数控制端(需要时钟,同步)
CTt、CTp使能端,高电平有效 CP:时钟 D3-D0:4位二进制输入
Q3-Q0:输出 Co:进位输出
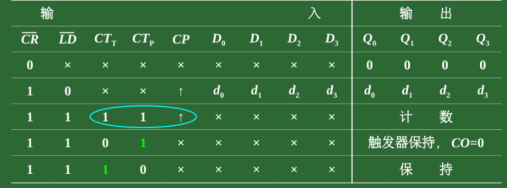
计数功能:每来一个脉冲就计数一次,对于74LS161是0000-1111,十六进制,最后Co=1
74LS160是从0000-1001,是十进制计数器,最后Co进位
(2)十二位二进制加法计数器( 74LS161)【重要】
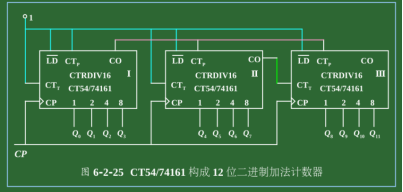
~LD是置数端,CPD、CPu是使能端,均为1时执行计数功能
第一片接法就是16位计数
第二片CTp接Co,即第一片产生一个进位Co才计数一次
第三片与第二片的区别:第二片的Co接在第三片的CTp上,即第二片记满并且第一片记满,第三片才记一次
异步触发器
不同于同步计数器,时钟脉冲不一定都是计数输入脉冲,各级触发器的状态转移不是同一时钟作用下同时发生转移
1、4位二进制异步计数器(16分频)
前一级的输出接后一级的时钟
状态转移方程:
(画工作波形会很直观)
从0000-1111
对电路图进行改变改变:如果将输入Qn变成~Qn,状态会从1111变到0000,实现十六进制减法
(4)最低位每来一个脉冲翻转一次,其他触发器在所有相邻最低位触发器由1->0时翻转一次
(5)特点
1)电路简单
2)工作速度慢,随着位数的增加,延时也大大增加
时延:Q1从1->0之后,Q2才能从1—>0……以此类推,需要等待,这就是时延,而且在改变的过程中,之前触发器的状态不能改变,否则会造成混乱,异步计数频率脉冲有非常严格的要求
采用中规模集成器件实现任意模值计数(分频)器
设计原理:从N进制(N<M=2^m)进制计数器的状态转移表中跳跃(N-M)个状态,从而得到M个状态的M计数分频器
方法一:利用清除端复位法
对于分频比要求较大的情况下,应用更方便
到达最后一个状态时,利用最后一个状态产生一个清除信号,加到清除端,使计数器返回到S0状态,这样就跳跃了N-M个状态,从而实现了模值为M的计数分频
例1:4位二进制同步计数器(74LS161)实现模10分频
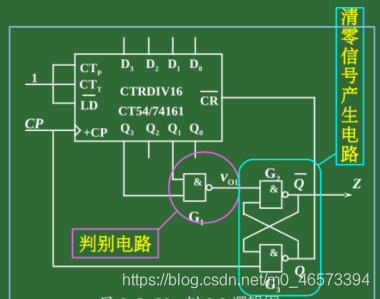
分析:在计数器的基础上增加判别和清零信号产生电路,当电路状态为1010时,产生清零信号,使计数器清零,回到0000状态
思考问题:
1、为什么选1010(1010是第11个状态),为什么会有11个状态呢?
因为161的清零是异步清零(不需要脉冲,只要满足~CR=0,那么Q3Q2Q1Q0=0000),所以只要探测到这个状态,就会立即清零,并不能维持一个时钟脉冲的时间,所以完整的时钟脉冲只是前面的10个脉冲,1010只是一瞬间,如果改成同步清零的话,因为采用同步时钟,是一整个脉冲信号,因此选择1001
2、基本触发器有什么作用
图中利用判别电路+基本触发器去产生清零信号,其中基本触发器可以忽略
(1)首先看看有没有触发器的区别
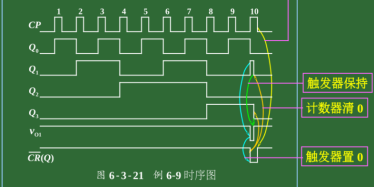
触发器11是保持状态,当没有触发器时,
CR变得和Vo1一样长(没有图中那么长,因为清零信号只在一瞬间),当有触发器时,因为触发器的保持功能,
CR能维持一个脉冲宽度的宽度。
(2)那为什么需要保持一个脉冲宽度呢?
因为如果集成器件各触发器翻转过程中,由于速度不等,就可能不能使全部触发器置0,采用触发器之后,Q端的清零信号宽度和计数脉冲CP=1的持续时间相等,可确保计数器可靠清零
(3)有没有必要加入触发器呢?
一般来说是没有必要加入触发器的,将Vo1直接加到计数器清零端是可以实现清零的,上述现象出现的概率很少
方法二:利用置入控制端的置位法
采用中规模集成器件的置入控制端,以置入某一固定二进制数值的方法,从而使N进制计数跳跃(N-M)个状态,实现模值为M的计数分频
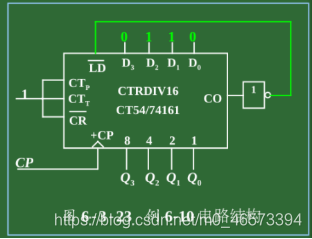
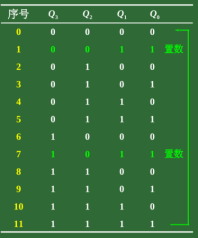
例 用4位二进制同步计数器74161(16个状态),实现模10数分频
LD是置位端,跳过0000-0101的6个状态,从0110到1111共10个状态,到最后一个状态会产生进位Co标志,因此令
LD=~Co实现“跳”到0110,采用同步置数,1111状态是能维持1个脉冲周期的时间的。
电路是固定结构,如果需要改变模值M,只需要改变输入端D3-D0的输入数据2^n-m的二进制代码
例2:应用4位二进制同步计数器CT54161,实现模12计数分频,要求计数器从0000开始计数
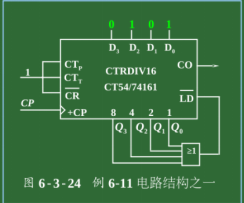
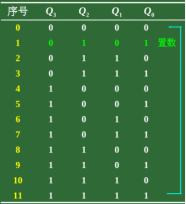
(解法1)
当在0000时,“跳”到0101开始,到1111刚好12个状态,因此采用电路Q0+Q1+Q2+Q3,在四位均为0000的时候才会输出0,启动置数
例2—— 置数输出方波信号
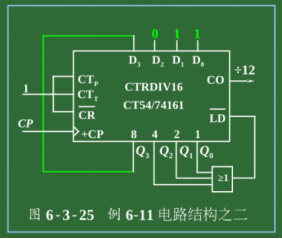
(解法2)
方波信号就是对称信号,将16位信号分成两半,每一半对称地跳过两个信号总线,根据观察,最高位D3 总是和输出的最高位相同,所以直接将Q3连到D3处,低3位和解法1思路一样
用集成移位寄存器实现任意模值M的计数分频
移位寄存器的状态转移是按照移存规律进行的,因此构成任意模值技术分频器的状态转移必然符合一寸规律,一般称为移存型计数器。常用的移存型计数器有环形计数器和扭环计数器
1、环形计数器的构成
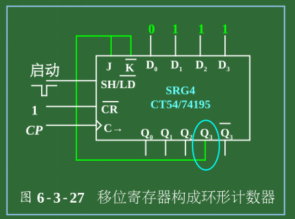
先回顾下74195的功能
(1)~CR=0是,是清除功能,Q3-Q0=0000
(2)SH/~LD=0,是置数功能,Q3-Q0=D3-D0
(3)SH/~LD=1,是移位功能,Q0->Q1->Q2->Q3,每来一个脉冲就移一位
(4)在移位状态下,CP=0,是保持功能
再看看启动脉冲,只有一个简单低电平,短时间的低电平是为了将0111置入到芯片中,置完就维持高电平不变,执行移位功能
Q0是如何移位的呢?根据JK触发器的状态方程可以算出Q0^n+1=Q3,(即Q3是Q0的下一个状态)
所以移位步骤如下:
Q0->Q1->Q2->Q3->Q0
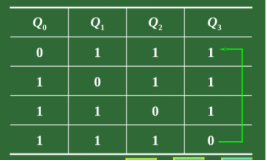
是一个模4计数器
2、扭环形计数器
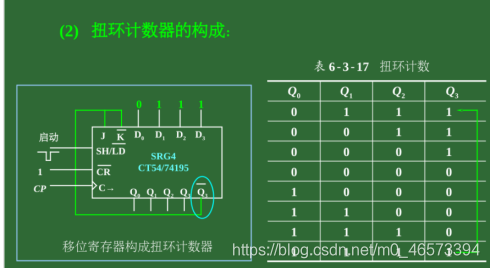
与环形计数器的区别是:环形计数器通过Q3端送到JK端,而扭环形计数器是通过~Q3端送到JK端
根据真值表可以发现,环形计数器是模4计数器,而扭环形计数器是模8计数器
不管上面放什么数,甚至是不接(1111),也是模8计数器