一、硬件
先了解一下AD7606,16位,单电源,200k采样率,8路,除了贵没有其他缺点,数据相当的稳,一个5V供电,不用运放的情况下采集电压精度可以达到1mv,非常Nice
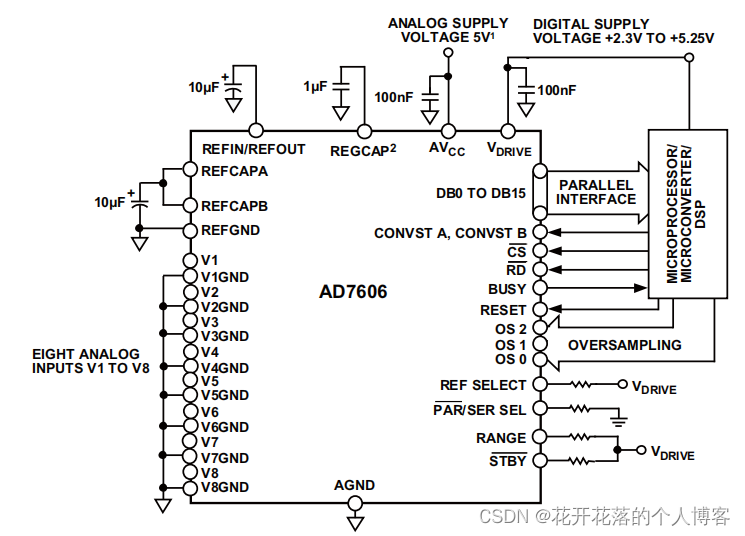
与单片机相连
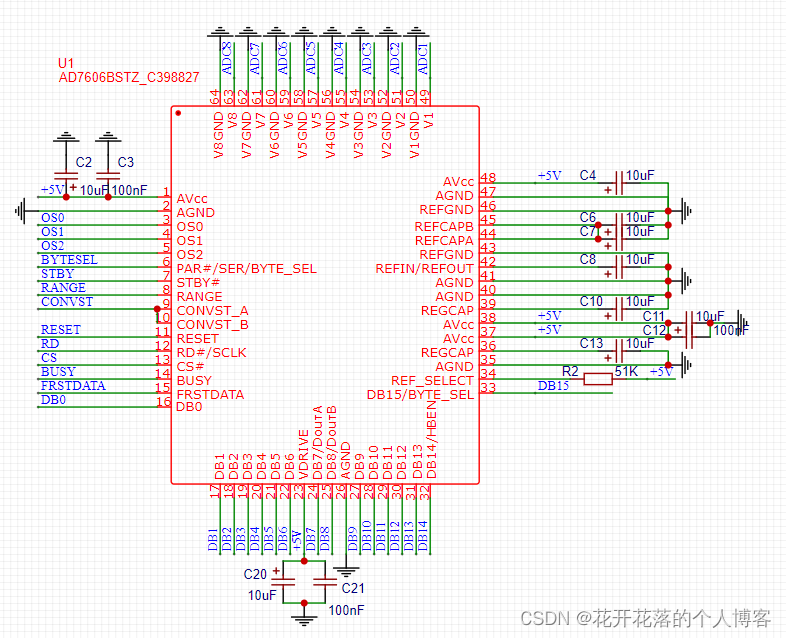
单片机

二、嵌入式软件
#include "ad7606.h"
#include "stdio.h"
#include "cmsis_os.h"
void delay_us(uint32_t delay)
{
uint32_t i=0;
for(i=0;i<delay;i++)
{
__NOP();
}
}
void delay_ms(uint32_t delay)
{
osDelay(delay);
}
AD7606CHDataREG ADCHData =
{
};
short adc_read_data()
{
short temp=0,j;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_15))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_14))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_13))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_12))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_11))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_10))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_9))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_8))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_7))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_6))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_5))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_4))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_3))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_2))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_1))temp++;
temp=temp<<1;
if( HAL_GPIO_ReadPin(GPIOD, GPIO_PIN_0))temp++;
return temp;
}
void AD7606Initialization(unsigned char OverSampleRate)
{
delay_ms(1);
ADC_RESET_L; //初始复位管脚低电平
switch(OverSampleRate)//采样率选择
{
case 200:OS_NO;break;
case 100:OS_2;break;
case 50: OS_4;break;
case 25: OS_8;break;
default: OS_NO;break;
}
ADC_CS_H;
ADC_CONV_H;
ADC_RD_H;
delay_ms(1);
}
void AD7606Reset(void)
{
//脉冲50nS复位有效
BYTE_SEL_L;//并行
ADC_STBY_H;//开始工作
ADC_RESET_H;
delay_us(1);
ADC_RESET_L;
delay_us(1);
}
void AD7606ReadSample(void)
{
uint8_t i = 0;
short Ary16[8];
//开启转换
ADC_CONV_L;
delay_us(1);
ADC_CONV_H;
delay_us(1);
//当前数据状态 低电平可读取新数据 高电平可读取上次结果
while(ADC_Busy_State)
{
}
delay_us(1);
ADC_CS_L;
ADC_RD_L;
delay_us(35);//35个ns
Ary16[0]=adc_read_data();
ADC_RD_H;//高电平宽度为15个ns最少
delay_us(35);//35个ns
ADC_RD_L;
delay_us(35);//35个ns
Ary16[1]=adc_read_data();
ADC_RD_H;//高电平宽度为15个ns最少
delay_us(35);//35个ns
ADC_RD_L;
delay_us(35);//35个ns
Ary16[2]=adc_read_data();
ADC_RD_H;//高电平宽度为15个ns最少
delay_us(35);//35个ns
ADC_RD_L;
delay_us(35);//35个ns
Ary16[3]=adc_read_data();
ADC_RD_H;//高电平宽度为15个ns最少
delay_us(35);//35个ns
ADC_RD_L;
delay_us(35);//35个ns
Ary16[4]=adc_read_data();
ADC_RD_H;//高电平宽度为15个ns最少
delay_us(35);//35个ns
ADC_RD_L;
delay_us(35);//35个ns
Ary16[5]=adc_read_data();
ADC_RD_H;//高电平宽度为15个ns最少
delay_us(35);//35个ns
ADC_RD_L;
delay_us(35);//35个ns
Ary16[6]=adc_read_data();
ADC_RD_H;//高电平宽度为15个ns最少
delay_us(35);//35个ns
ADC_RD_L;
delay_us(35);//35个ns
Ary16[7]=adc_read_data();
ADC_RD_H;ADC_CS_H;//高电平宽度为15个ns最少
for(i=0;i<8;i++)
{
if(Ary16[i]<0)
{
Ary16[i] = 0;
}
}
ADCHData.REG.AD7606_1 = ((float)Ary16[0]/32768) * 5;
ADCHData.REG.AD7606_2 = ((float)Ary16[1]/32768) * 5;
ADCHData.REG.AD7606_3 = ((float)Ary16[2]/32768) * 5;
ADCHData.REG.AD7606_4 = ((float)Ary16[3]/32768) * 5;
ADCHData.REG.AD7606_5 = ((float)Ary16[4]/32768) * 5;
ADCHData.REG.AD7606_6 = ((float)Ary16[5]/32768) * 5;
ADCHData.REG.AD7606_7 = ((float)Ary16[6]/32768) * 5;
ADCHData.REG.AD7606_8 = ((float)Ary16[7]/32768) * 5;
}#ifndef __AD7606_H__
#define __AD7606_H__
#include "gpio.h"
//ADC7606——AD采集相关参数管脚定义//
//推挽输出模式
#define ADC_CONV_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET);//通道转换开始
#define ADC_CONV_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET);
#define ADC_RESET_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_SET);//复位管脚使能
#define ADC_RESET_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET);
#define ADC_RD_H HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12, GPIO_PIN_SET);//
#define ADC_RD_L HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12, GPIO_PIN_RESET);
#define ADC_CS_H HAL_GPIO_WritePin(GPIOC, GPIO_PIN_11, GPIO_PIN_SET);
#define ADC_CS_L HAL_GPIO_WritePin(GPIOC, GPIO_PIN_11, GPIO_PIN_RESET);
//工作模式选择H正常工作L休眠
#define ADC_STBY_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);
#define ADC_STBY_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET);
//数据传输模式选择,
#define BYTE_SEL_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
#define BYTE_SEL_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
//工作模式选择H正常工作L休眠
#define ADC_10V HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
#define ADC_5V HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
//RD下降沿后读取,高电平可提供V1结果,下一个下降延
#define ADC_FSTDATA HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_15)
//当前数据状态 低电平可读取新数据 高电平可读取上次结果
#define ADC_Busy_State HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_10)
//并行数据采集
#define ADC_PDate GPIOD->IDR&0xFFFF
//000 200K 调节采样模式---推挽输出
#define ADC_OS0_H HAL_GPIO_WritePin(GPIOE, GPIO_PIN_1, GPIO_PIN_SET);
#define ADC_OS0_L HAL_GPIO_WritePin(GPIOE, GPIO_PIN_1, GPIO_PIN_RESET);
#define ADC_OS1_H HAL_GPIO_WritePin(GPIOE, GPIO_PIN_0, GPIO_PIN_SET);
#define ADC_OS1_L HAL_GPIO_WritePin(GPIOE, GPIO_PIN_0, GPIO_PIN_RESET);
#define ADC_OS2_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);
#define ADC_OS2_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
//采样率设置
#define OS_NO ADC_OS0_L;ADC_OS1_L;ADC_OS2_L;
#define OS_2 ADC_OS0_H;ADC_OS1_L;ADC_OS2_L;
#define OS_4 ADC_OS0_L;ADC_OS1_H;ADC_OS2_L;
#define OS_8 ADC_OS0_H;ADC_OS1_H;ADC_OS2_L;
typedef struct
{
struct
{
float AD7606_1; //
float AD7606_2;
float AD7606_3;
float AD7606_4;
float AD7606_5;
float AD7606_6;
float AD7606_7;
float AD7606_8;
float AD_9;
float AD_10;
float AD_11;
float AD_12;
float AD_13;
}REG;
struct
{
float C1; //
float C2;
float C3;
float C4;
float C5;
float C6;
float C7;
float C8;
float C9;
float C10;
float C11;
float C12;
float C13;
}VALUE;
}AD7606CHDataREG;
extern AD7606CHDataREG ADCHData;
void AD7606Initialization(unsigned char OverSampleRate);//初始采样率定义
void AD7606ReadSample(void);//周期采样
void AD7606ReadOnceSample(void);//单次数据采集
void AD7606Reset(void);
#endif调用代码
void sample_task(void const * argument)
{
AD7606Reset();
AD7606Initialization(200);
for(;;)
{
vTaskSuspendAll();
AD7606ReadSample();
get_adc_value();
printf("[adc]:c1:%.4fv,c2:%.4fv,c3:%.4fv,c4:%.4fv,c5:%.4fv,c6:%.4fv,c7:%.4fv,c8:%.4fv,c9:%.4fv,c10:%.4fv,c11:%.4fv,c12:%.4fv\r\n",ADCHData.REG.AD7606_1,ADCHData.REG.AD7606_2,ADCHData.REG.AD7606_3,ADCHData.REG.AD7606_4,ADCHData.REG.AD7606_5,ADCHData.REG.AD7606_6,ADCHData.REG.AD7606_7,ADCHData.REG.AD7606_8,ADCHData.REG.AD_9,ADCHData.REG.AD_10,ADCHData.REG.AD_11,ADCHData.REG.AD_12);
printf("[adc]:c1:%.4f,c2:%.4f,c3:%.4f,c4:%.4f,c5:%.4f,c6:%.4fv,c7:%.4f,c8:%.4f,c9:%.4f,c10:%.4f℃,c11:%.4f℃,c12:%.4f℃\r\n",ADCHData.VALUE.C1,ADCHData.VALUE.C2,ADCHData.VALUE.C3,ADCHData.VALUE.C4,ADCHData.VALUE.C5,ADCHData.VALUE.C6,ADCHData.VALUE.C7,ADCHData.VALUE.C8,ADCHData.VALUE.C9,ADCHData.VALUE.C10,ADCHData.VALUE.C11,ADCHData.VALUE.C12);
xTaskResumeAll();
osDelay(1000);
}
}
三、STM32H7的AD采集
测试发现AD采集到的电压要远小于实际电压,H7的AD还是16位的,不能这么拉跨吧,在网上搜索了一圈,找了的解决办法,延长AD的采样时间比校正AD管用的多,Config.SamplingTime = ADC_SAMPLETIME_64CYCLES_5;
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file adc.c
* @brief This file provides code for the configuration
* of the ADC instances.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "adc.h"
/* USER CODE BEGIN 0 */
#include "ad7606.h"
#include "stdio.h"
#include "cmsis_os.h"
#define ADC_CONVERTED_DATA_BUFFER_SIZE ((uint32_t) 32) /* Size of array aADCxConvertedData[] */
ALIGN_32BYTES (static uint16_t aADCxConvertedData[ADC_CONVERTED_DATA_BUFFER_SIZE]);
/* USER CODE END 0 */
ADC_HandleTypeDef hadc1;
/* ADC1 init function */
void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_MultiModeTypeDef multimode = {0};
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Common config
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_ASYNC_DIV1;
hadc1.Init.Resolution = ADC_RESOLUTION_16B;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
hadc1.Init.LowPowerAutoWait = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ConversionDataManagement = ADC_CONVERSIONDATA_DR;
hadc1.Init.Overrun = ADC_OVR_DATA_PRESERVED;
hadc1.Init.LeftBitShift = ADC_LEFTBITSHIFT_NONE;
hadc1.Init.OversamplingMode = DISABLE;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure the ADC multi-mode
*/
multimode.Mode = ADC_MODE_INDEPENDENT;
if (HAL_ADCEx_MultiModeConfigChannel(&hadc1, &multimode) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_7;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_64CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
sConfig.OffsetSignedSaturation = DISABLE;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
//HAL_ADCEx_Calibration_Start(&hadc1,ADC_CALIB_OFFSET_LINEARITY,ADC_DIFFERENTIAL_ENDED);
/* USER CODE END ADC1_Init 2 */
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/** Initializes the peripherals clock
*/
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInitStruct.PLL2.PLL2M = 4;
PeriphClkInitStruct.PLL2.PLL2N = 8;
PeriphClkInitStruct.PLL2.PLL2P = 1;
PeriphClkInitStruct.PLL2.PLL2Q = 2;
PeriphClkInitStruct.PLL2.PLL2R = 2;
PeriphClkInitStruct.PLL2.PLL2RGE = RCC_PLL2VCIRANGE_3;
PeriphClkInitStruct.PLL2.PLL2VCOSEL = RCC_PLL2VCOWIDE;
PeriphClkInitStruct.PLL2.PLL2FRACN = 0;
PeriphClkInitStruct.AdcClockSelection = RCC_ADCCLKSOURCE_PLL2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
/* ADC1 clock enable */
__HAL_RCC_ADC12_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**ADC1 GPIO Configuration
PA7 ------> ADC1_INP7
PC4 ------> ADC1_INP4
PC5 ------> ADC1_INP8
PB0 ------> ADC1_INP9
*/
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN ADC1_MspInit 1 */
/* USER CODE END ADC1_MspInit 1 */
}
}
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspDeInit 0 */
/* USER CODE END ADC1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_ADC12_CLK_DISABLE();
/**ADC1 GPIO Configuration
PA7 ------> ADC1_INP7
PC4 ------> ADC1_INP4
PC5 ------> ADC1_INP8
PB0 ------> ADC1_INP9
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_7);
HAL_GPIO_DeInit(GPIOC, GPIO_PIN_4|GPIO_PIN_5);
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_0);
/* USER CODE BEGIN ADC1_MspDeInit 1 */
/* USER CODE END ADC1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
volatile uint32_t uhADCxConvertedValue = 0;
//共33条记录
const float NCP18XH103F03RB_10k_table[]={
195.652,
148.171,
113.347,
87.559,
68.237,
53.650,
42.506,
33.892,
27.219,
22.021,
14.674,
12.081,
10.000,
8.315,
6.948,
5.834,
4.917,
4.161,
3.535,
3.014,
2.586,
2.228,
1.925,
1.669,
1.452,
1.268,
1.110,
0.974,
0.858,
0.758,
0.672,
0.596,
0.531
};
float NCP18XH103F03RB_10k_lookup(float res)
{
float value = -40;
int16_t index = 0;
int32_t decimals = 0;
for(index = 0;index < 33;index++)
{
if(NCP18XH103F03RB_10k_table[index]<res)
{
break;
}
}
/** temperature overflow **/
if(index >= 32) return 1200;
if(index == 0) return -350;
value = value + (index*5) - ((res - NCP18XH103F03RB_10k_table[index])/(NCP18XH103F03RB_10k_table[index-1]-NCP18XH103F03RB_10k_table[index]))*5;
return value;
}
float get_ntc_temp(float voltage){ //input : AD voltage (raw data). 10k/(10k+res)=ad_temp*1800/4096/1800
float res;
/** temperature sensor no connect **/
if(voltage < 0) return -500;
//10k电阻
res = (10*3.26 - voltage * 10)/voltage;
return NCP18XH103F03RB_10k_lookup(res);
}
uint16_t GetAdValue(uint32_t channel)
{
uint16_t i;
ADC_ChannelConfTypeDef sConfig;
uhADCxConvertedValue = 0;
/* Parameter discarded because offset correction is disabled */
sConfig.Channel = channel;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_64CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
sConfig.OffsetSignedSaturation = DISABLE;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
return 0;
}
/*##-3- Start the conversion process #######################################*/
if (HAL_ADC_Start(&hadc1) != HAL_OK)
{
/* Start Conversation Error */
return 0;
}
/*##-4- Wait for the end of conversion #####################################*/
/* For simplicity reasons, this example is just waiting till the end of the
conversion, but application may perform other tasks while conversion
operation is ongoing. */
if (HAL_ADC_PollForConversion(&hadc1, 10) != HAL_OK)
{
/* End Of Conversion flag not set on time */
HAL_ADC_Stop(&hadc1);
return 0;
}
else
{
/* ADC conversion completed */
for(i=0;i<10;i++)
{
HAL_ADC_GetValue(&hadc1);
}
/*##-5- Get the converted value of regular channel ########################*/
for(i=0;i<10;i++)
{
uhADCxConvertedValue += HAL_ADC_GetValue(&hadc1);
}
uhADCxConvertedValue = uhADCxConvertedValue/10;
}
HAL_ADC_Stop(&hadc1);
return 1;
}
void get_adc_value(void)
{
int16_t ret = 0;
float value = 0,value1 = 0;
HAL_ADC_MspDeInit(&hadc1);
HAL_ADC_MspInit(&hadc1);
HAL_Delay(1000);
ret = GetAdValue(ADC_CHANNEL_8);
if(ret==0)
{
printf("adc9电压转换失败\r\n");
}
else
{
value = (3.26/65535)*uhADCxConvertedValue;
}
ADCHData.REG.AD_9 = value;
HAL_Delay(100);
ret = GetAdValue(ADC_CHANNEL_7);
if(ret==0)
{
printf("adc10电压转换失败\r\n");
}
else
{
value = (3.26/65535)*uhADCxConvertedValue;
ADCHData.VALUE.C10 = get_ntc_temp(value);
ADCHData.REG.AD_10 = value;
}
ret = GetAdValue(ADC_CHANNEL_4);
if(ret==0)
{
printf("adc11电压转换失败\r\n");
}
else
{
value = (3.26/65535)*uhADCxConvertedValue;
ADCHData.VALUE.C11 = get_ntc_temp(value);
ADCHData.REG.AD_11 = value;
}
ret = GetAdValue(ADC_CHANNEL_9);
if(ret==0)
{
printf("adc12电压转换失败\r\n");
}
else
{
value = (3.26/65535)*uhADCxConvertedValue;
ADCHData.VALUE.C12 = get_ntc_temp(value);
ADCHData.REG.AD_12 = value;
}
}
/* USER CODE END 1 */
AD值非常准
c10:1.7133v,c11:1.7064v,c12:1.6983v
c10:22.8853℃,c11:22.6582℃,c12:22.3859℃
版权声明:本文为g313105910原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。