舵轮AGV可以通过调整两个舵轮的角度及速度,可以使小车在不转动车头的情况下实现变道,转向等动作,甚至可以实现沿任意点为半径的转弯运动,有很强的灵活性。 因此在AGV行业,这种驱动方式应用很广,但是目前能做好控制的厂家并不多。国内比较好的厂家主要有沈阳新松机器人、苏州华晓精密、上海同普,还有部分新创企业,苏州极客嘉智能科技有限公司,做的也很好。
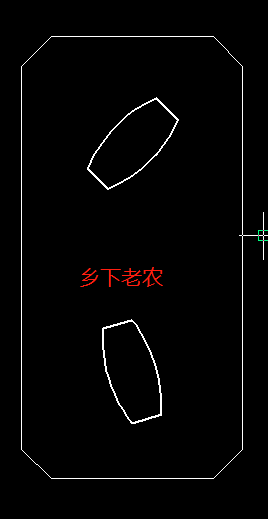
该种AGV,一般包含两个舵轮,通常布置在AGV车体中心前后、或AGV车体对角分布。如图:
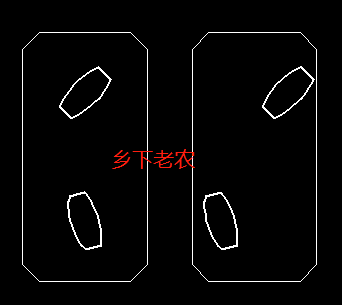
本文将以在车体中心前后分布方式的AGV为例,进行分析。
大家都知道舵轮的参数有线速度大小、角速度大小、舵向值(v,w,a)三个参数(舵轮线速度方向一定等于舵向值)。同时我们控制双舵轮AGV去跟随路劲的时候,导航算法控制器也会给AGV下发线速度大小、线速度方向、角速度(不同于差速轮AGV,舵轮AGV可以全向行走,因此线速度方向是可以不同于AGV的航向角的,本文假设的线速度方向相对于AGV航向角),然后AGV舵轮驱动算法,将根据导航算法下发的三个参数来解算两个舵轮