文章目录
芯片与板子介绍
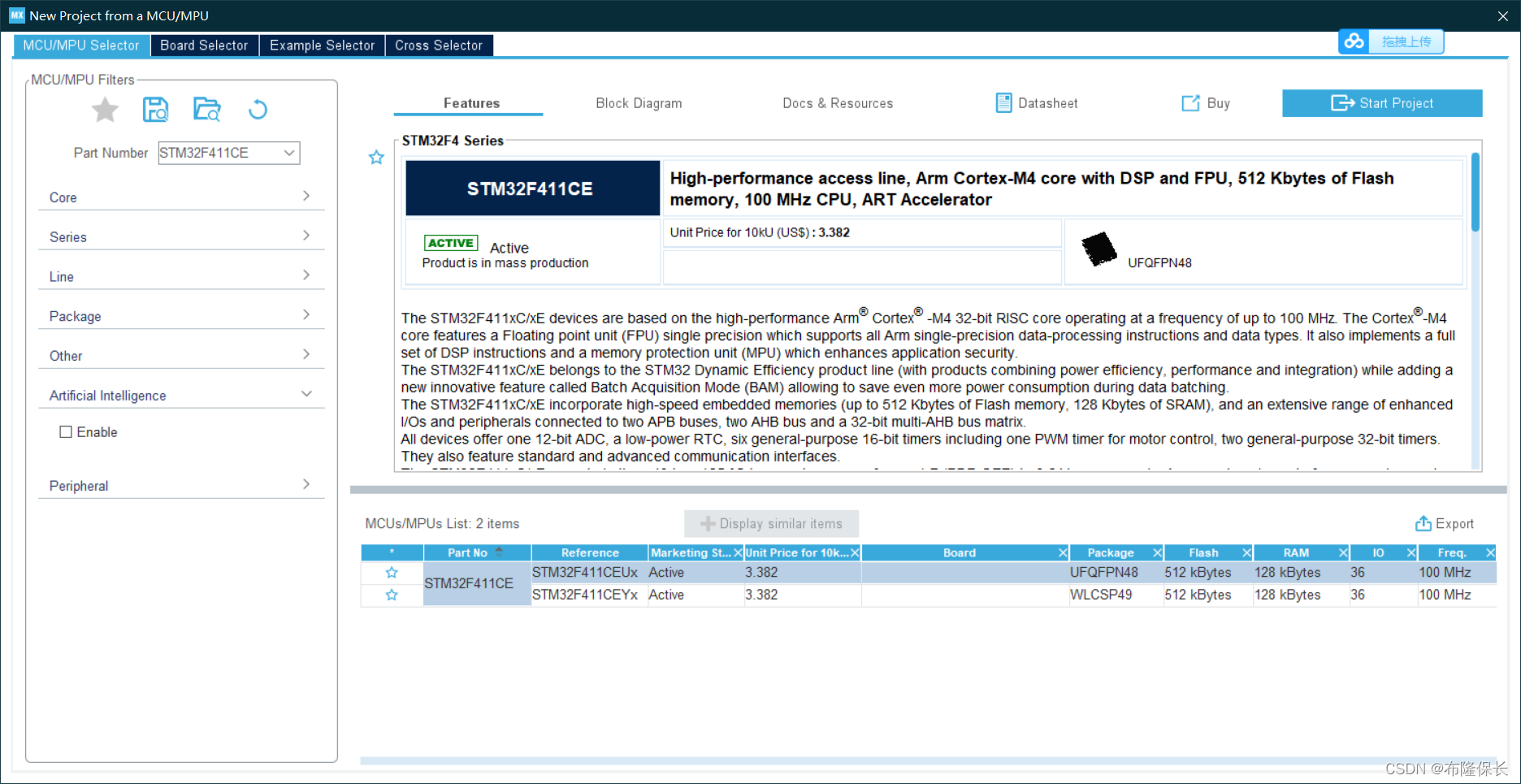
我现在使用的芯片是
stm32f411ceu6
。
主频
F4系列芯片的最高频率分为4个等级,84、100、168、180MHz。这块芯片是100MHz的,这个最高频率我们在之后计算定时器的时候还是会用到的,当然我们的芯片也基本会一直以最高频率运行。
我之前一直使用的芯片是
f407ve/gt6
,它的主频为168MHz。
f103c8t6
的主频为72MHz。
RAM 与 Flash
stm32f411ceu6
的RAM为128kb,其中存放变量等实时数据。Flash为512kb,其中存放代码等静态数据。
STM32芯片的命名中数字代号之后的第二个字母是Flash大小,
e
就是512kb,
g
排在之后,1024kb。所以
f407vet6
的
Flash
为512kb,
f407vgt6
的
Flash
为1024kb。具体的可以见下图。
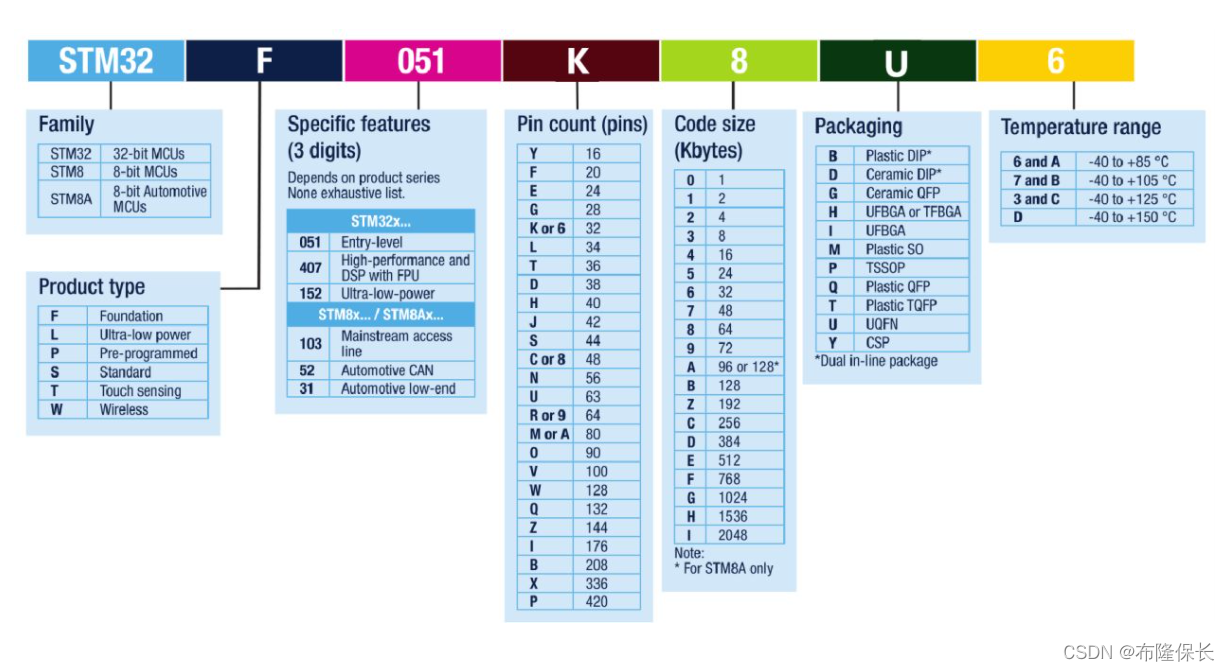
io数与封装
这个从上图就可以看出
f411ceu6
的引脚数是48个,其中可编程io有32个。封装为UFQFPN48。一般常用的封装是
QFP
,全程是
Quad Flat Package
,四方扁平式封装,引脚是露出来的,扁平的L型。
QFN
为
Quad Flat Non-leaded Package
,即四侧无引脚扁平封装。这是一种从上面看不见引脚的封装,整个芯片就是一个扁平的四方体。


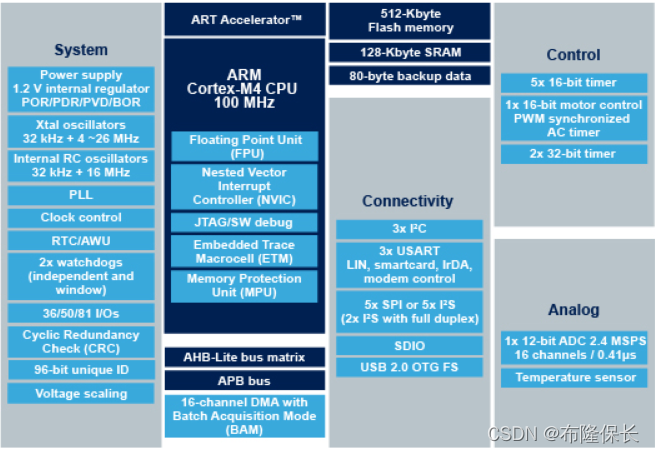
内置外设
作为一个单片机,内置外设的多少和质量是很重要的。大致上,
f411ceu6
由于引脚少,芯片面积小,有5个16位定时器,2个32位定时器,1个电机专用的16位定时器,1个12位ADC,有16个通道,通信外设若干……具体的可见下图。
板子外设
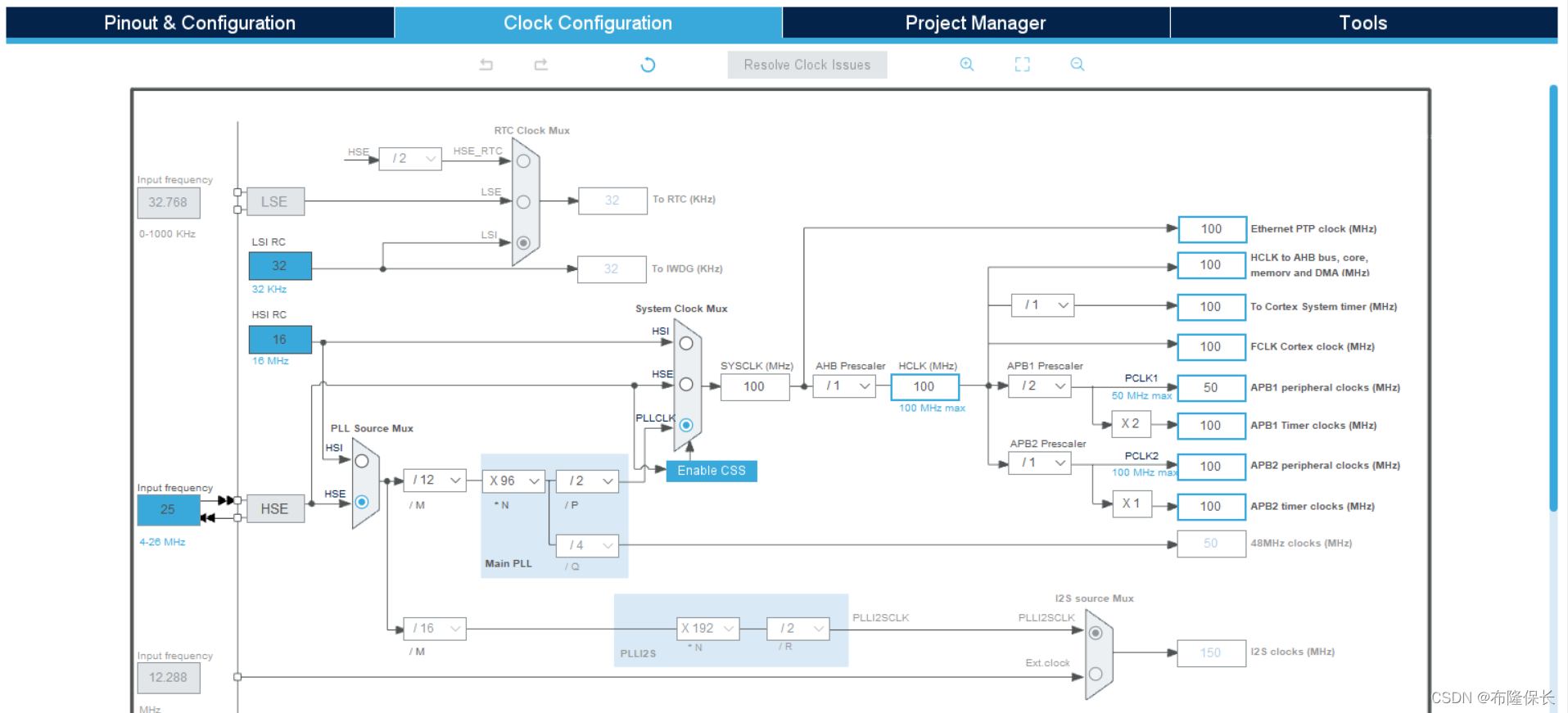
板子是某宝上很简单的一块开发板。上面有个25MHz的高速晶振,和一个32.768kHz的低速晶振。有复位按键、boot0按键、和一个可编程按键。有一个可编程灯。SW的烧录口。仅此而已。其中晶振的数值我们在新建工程时需要使用到。
新建工程文件的步骤
打开
cubemx6.4.0
。
选择芯片
点击
ACCESS TO MCU SELECTOR
,选择
STM32F411CEU6
。
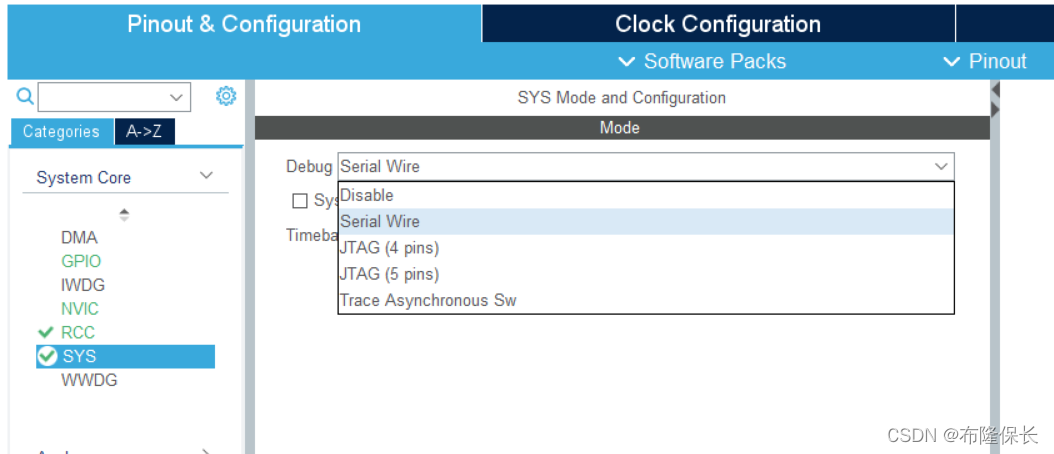
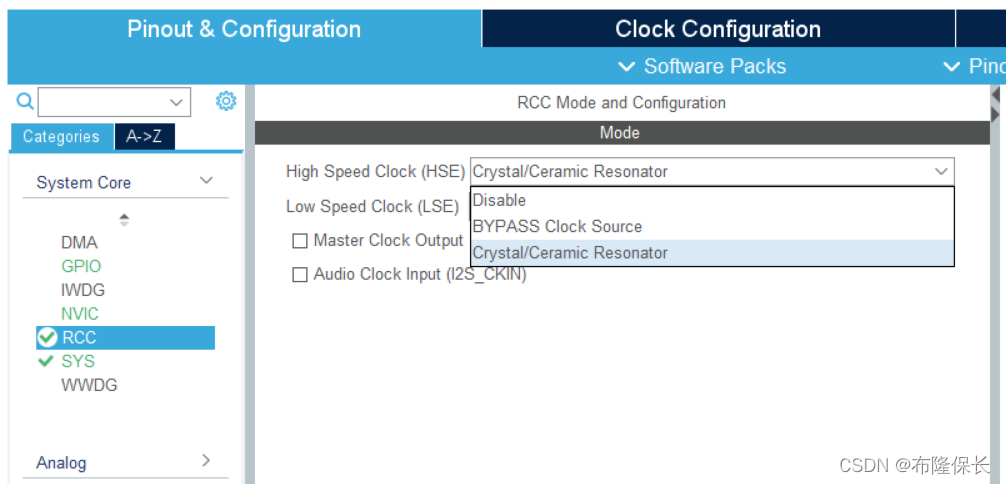
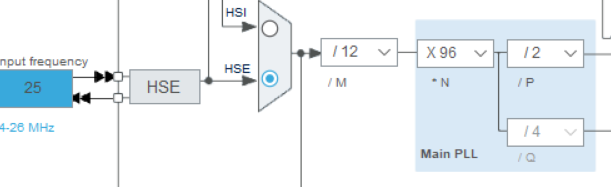
选取调试方式,选取高速晶振,调整时钟
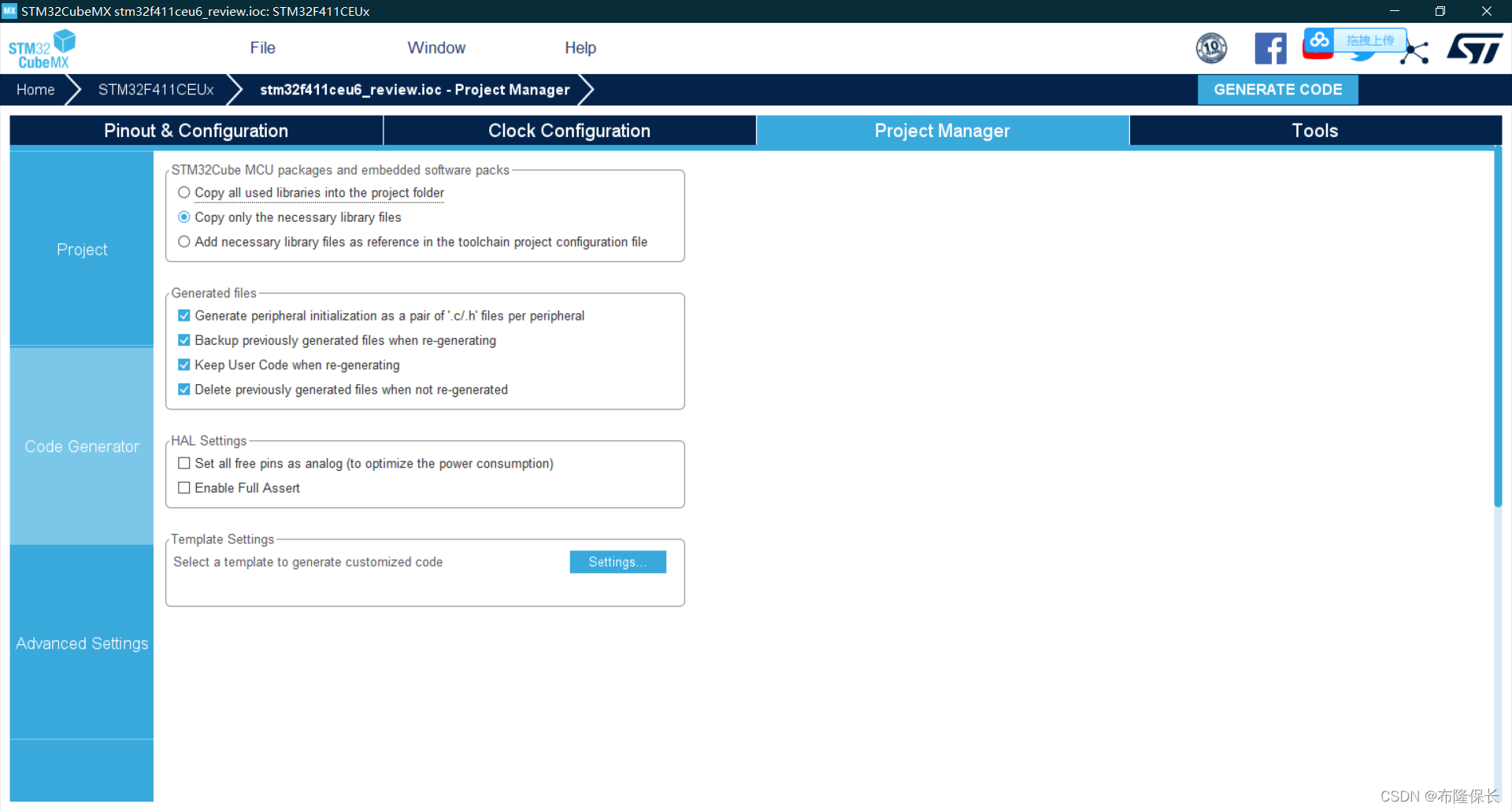
修改文件设置,和生成设置
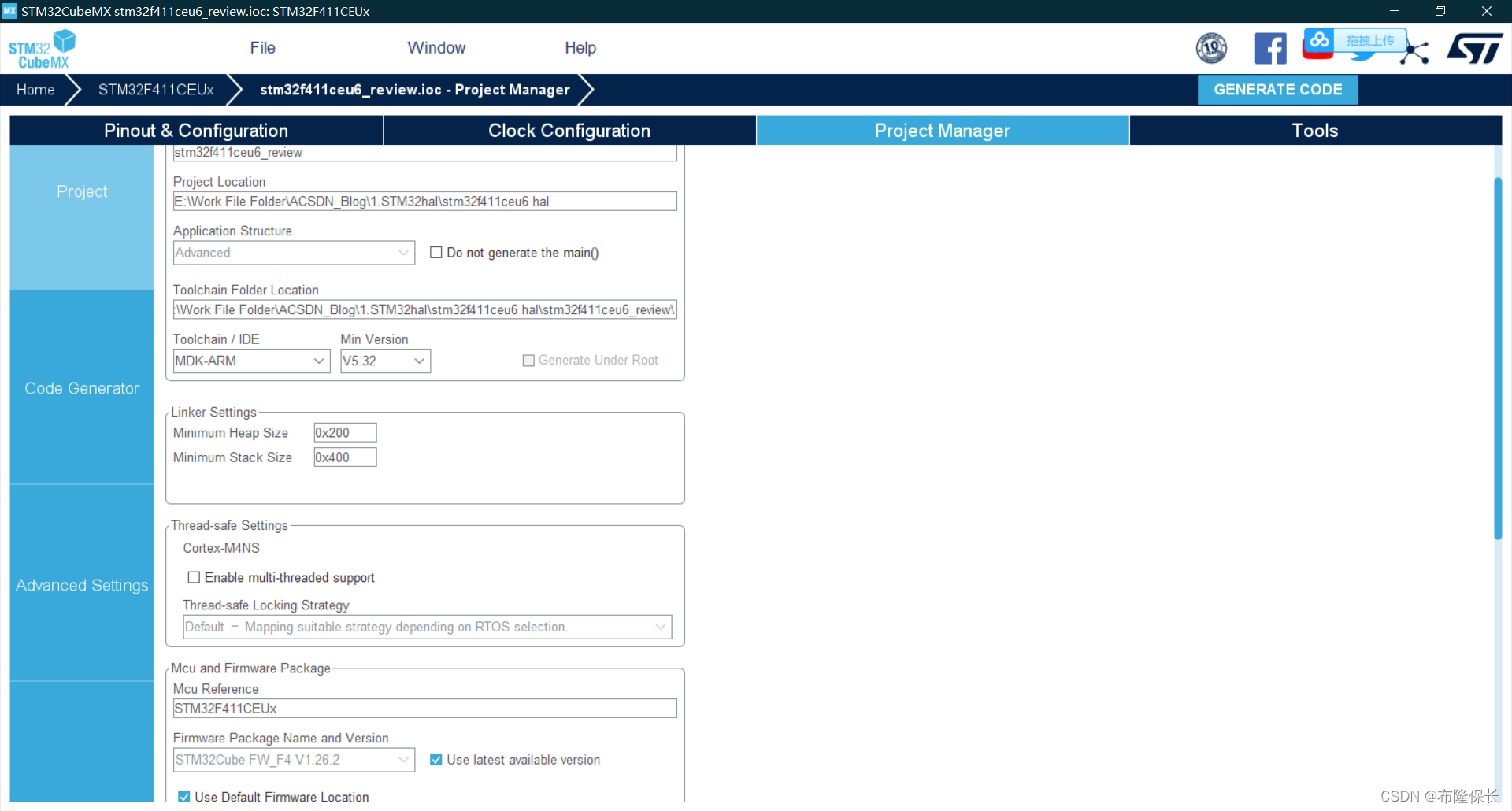
在这里,我勾选了备份先前的文件,我是准备试试这个功能的,具体情况,之后再总结。
生成工程文件
点击
GENERATE CODE
即可。
工程文件夹解读
core
core文件夹中有inc和src两个子文件夹。inc是include的缩写,里面包含的是.h文件,也就是头文件。src是source code的缩写,里面包含的是.c文件,也就是源码文件,又称源文件。这些文件是根据用户在cubemx中的设置生成的,也有一部分是不设置也会生成的,比如main.c文件。
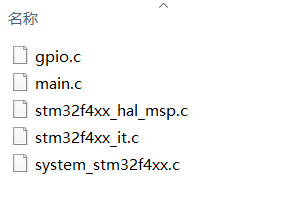
gpio.c中是开启了GPIOH和GPIOA的时钟,因为我们的下载用到了PA13、PA14,高速晶振用到了PH0、PH1。
main.c的结构我们一会儿再说明。
hal_msp.c中的msp应该是MCU Specific Package的缩写,是针对MCU做的底层初始化。其中是关于MCU的最底层的东西。
it.c是中断相关的内容,it是interrupt的缩写。但是我的中断服务程序也不会写在这个里面。
system.c是一些关于特殊芯片型号的ram地址区别选择。这些东西都是预先写好的,根据定义自动修改,我们不用进行调整。
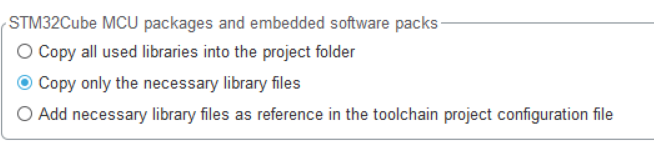
Drivers
Drivers文件夹里的都是库文件,是从一开始预先下载的那些包中,拷贝过来的。在代码生成器设置里面有关于怎么拷贝库文件的选项,我们选择只拷贝必要的库文件即可,可以减小工程文件的大小。
MDK-ARM
这里是mdk-ARM的工程文件所在文件夹,可以从这里打开keil文件。一些keil生成的文件也可以在这个文件夹被找到。
main.c和main.h文件解读
说是解读,其实就是英文不好,看不懂英文。那就翻译一遍。
写代码要写在Begin和End之间,这样不会被重新生成代码而冲掉。
main.c
开头介绍文件内容和职能。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
include的头文件
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
从上到下分别是
- 私人头文件
- 私人类型定义(PTD)(typedef 类型定义)
- 私人定义 (PD)(define 定义)
- 私人宏定义 (PM)(macro 宏)
- 私人变量(PV)(variables 变量(复))
- 私人函数原型(PFP)(function 函数 prototypes 原型)
- 第0段用户代码(code 代码)
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
main函数
- 第1段用户代码
- MCU配置 HAL_Init();//HAL初始化
- 用户Init(初始化)
- 配置系统时钟
- 用户SysInit(系统初始化)
- 初始化所有配置的外围设备(Initialize all configured peripherals)
- 第2段用户代码
- 无限循环(Infinite loop)
- 主要用户代码
- 第3段用户代码
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
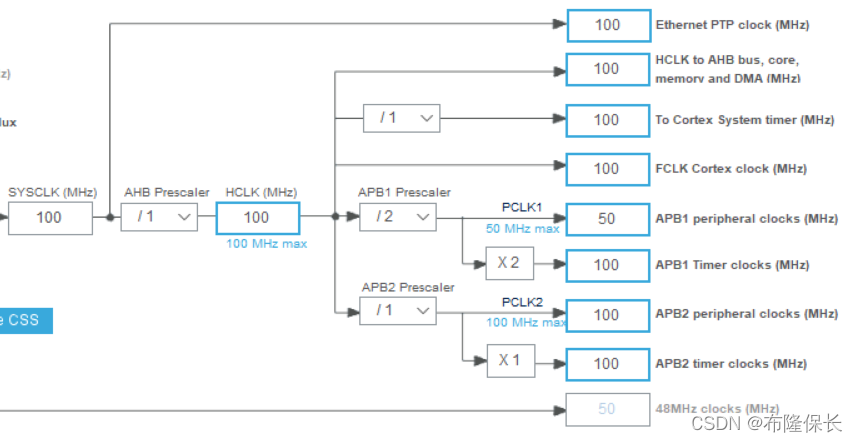
系统时钟配置(自动设置)
选择外部晶振,配置PLL(锁相环)。详细参数可以与下图对照。
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 12;
RCC_OscInitStruct.PLL.PLLN = 96;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
错误处理函数
- 第四段用户代码
- 错误处理函数
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
检测传递给函数的参数是否为有效的参数,这个我还不会,大家可以参考下面的博文。
assert_failed函数使用
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
main.c的翻译到此结束。
main.h
开头介绍文件内容和职能。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.h
* @brief : Header for main.c file.
* This file contains the common defines of the application.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
内容
- 定义以防止递归的重复定义(recursive 递归的)
- include(头文件)
- 私人头文件
- Exported types 调出类型(ET)
- Exported constants 调出常量(EC)
- Exported macro 调出宏定义(EM)
- Exported functions prototypes 调出函数原型(EFP)
- 私人定义
- if define c++
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __MAIN_H
#define __MAIN_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "stm32f4xx_hal.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Exported types ------------------------------------------------------------*/
/* USER CODE BEGIN ET */
/* USER CODE END ET */
/* Exported constants --------------------------------------------------------*/
/* USER CODE BEGIN EC */
/* USER CODE END EC */
/* Exported macro ------------------------------------------------------------*/
/* USER CODE BEGIN EM */
/* USER CODE END EM */
/* Exported functions prototypes ---------------------------------------------*/
void Error_Handler(void);
/* USER CODE BEGIN EFP */
/* USER CODE END EFP */
/* Private defines -----------------------------------------------------------*/
#define LED_Pin GPIO_PIN_13
#define LED_GPIO_Port GPIOC
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
#ifdef __cplusplus
}
#endif
#endif /* __MAIN_H */
补充位带操作代码
在51单片机的学习中,我们可以直接操作引脚。比如P1^1 = 1。
但是在stm32中直接操作引脚需要操作寄存器,或者使用库函数HAL_GPIO_WritePin(标准库的不一样)。
但是在某点原子上有这么一段代码非常有用,可以实现位带操作。
这段代码可以放在main.h中。
/* USER CODE BEGIN Private defines */
XXXX “adhere”
/* USER CODE END Private defines */
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).M4同M3类似,只是寄存器地址变了.
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
使用案例
先在cubemx中设置PC13为GPIO_OUT模式,(User laber随便命名一下为LED即可,我们在库函数才能用到)。设置完后生成代码,在main.c中写这个就可以实现LED每隔1s亮闪。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
PCout(13) = !PCout(13);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
挖坑cubeide
其实cubeide我曾用过,但由于不顺手所以我废弃了,启用了现在这种
cubemx+keil5
的开发模式。
我打算等这个系列完结后(至少第一季完结后),开始学习cubeide,并且和大家分享我的学习经验。帅还是cubeide帅一点。