从SOLIDWORKS中导出机械臂URDF
一.下载sw_urdf_export插件
插件的安装和下载可详见我写的差速小车第一章的内容
对机械臂模型进行开源(博主用的是SW2019版本)。当时拿到这个gluon机械臂的模型进行设置还挺麻烦的,从网上获取到的模型文件用solidworks软件打开无法进行编辑,这里博主是用fusion360软件对网上拿到的模型进行零件上的拆解,并导出为sw中使用的step格式,并用solidworks进行重新装配,再将机械臂的主要几个连杆以及关节作为零件step导出,再进行机械臂总体的装配,并自行设计了realsensed435i的链接零件,可以打印出来直接用于真实摄像头的安装。机械臂模型文件开源地址如下:
链接:
https://pan.baidu.com/s/1nMOvHtUMMx9_F9zLl8zUFg
提取码:tq7v
–来自百度网盘超级会员V3的分享
二.配置模型
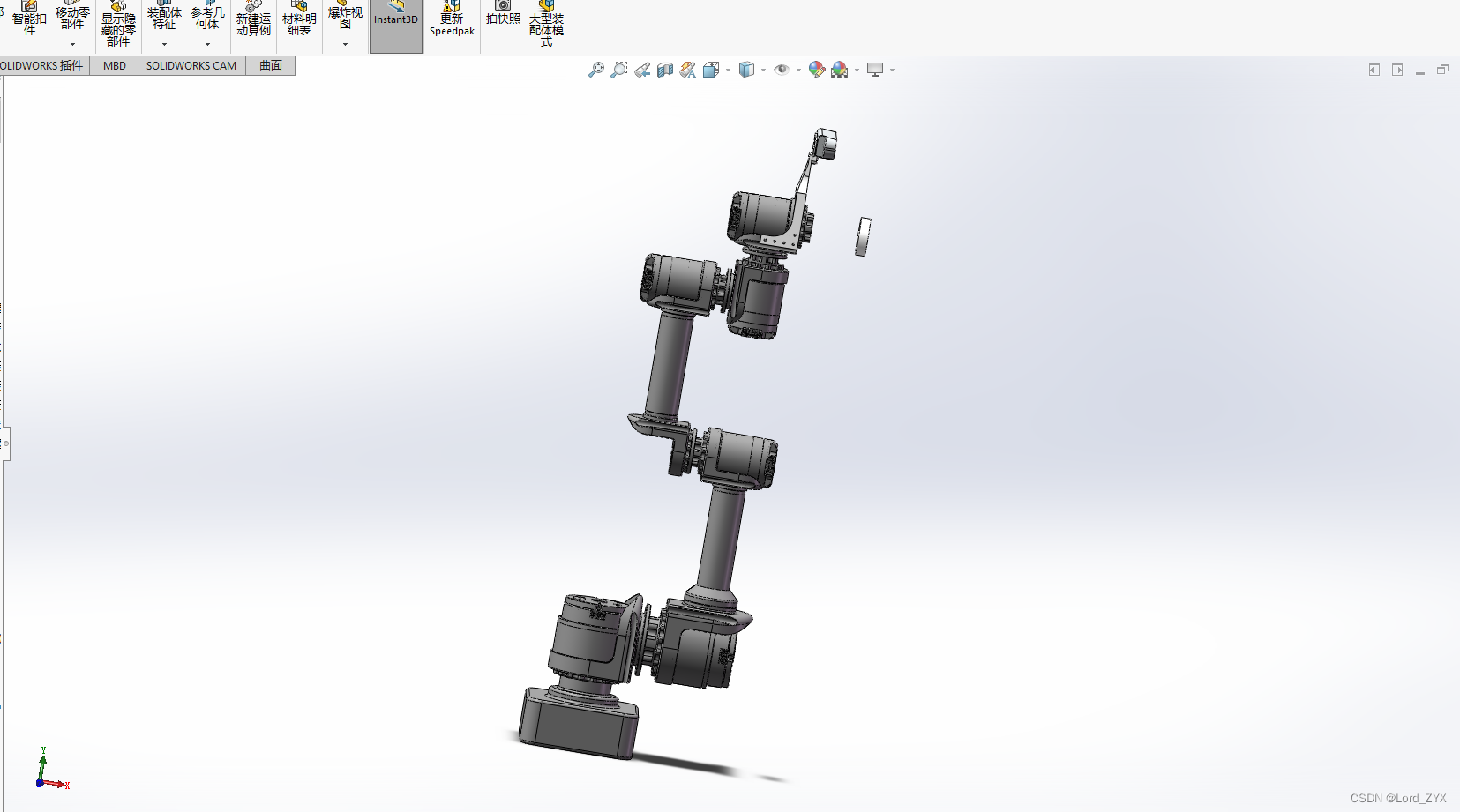
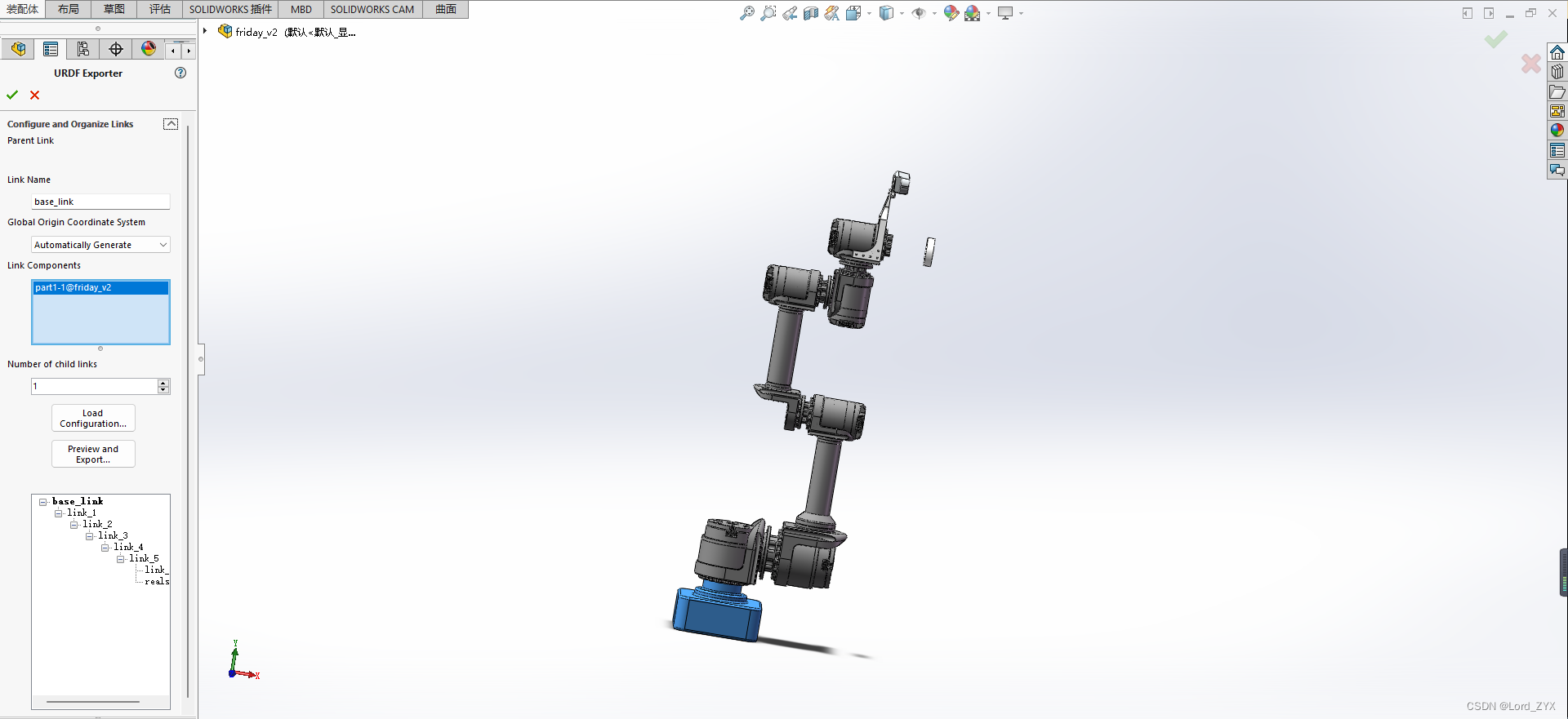
首先将装配体在solidworks中打开,可以看到装配体为一个六轴机械臂带摄像头和末端吸盘,下面需要为导出URDF做一些配置工作。
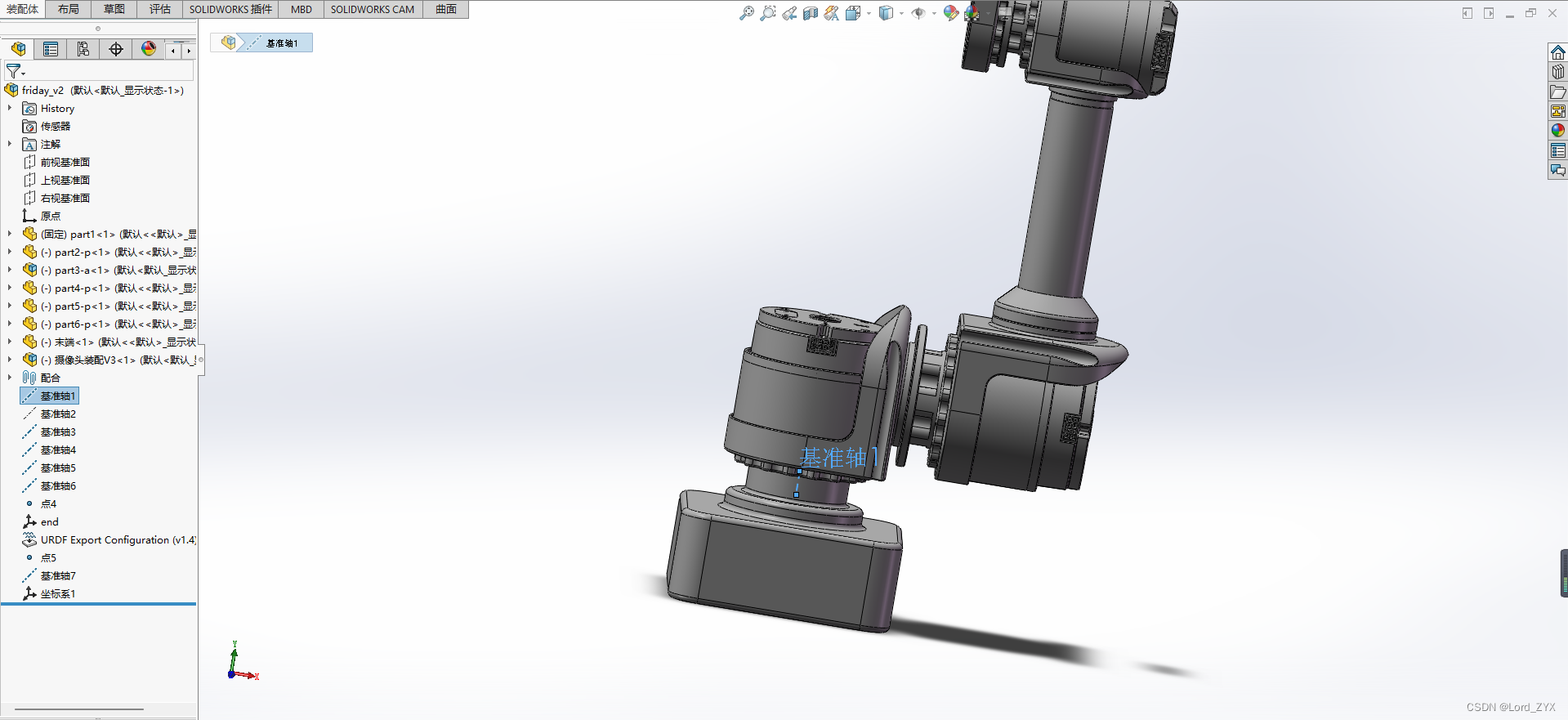
设置旋转轴
机械臂导出URDF可以不需要设置点和坐标系,每个link的坐标系可由插件自动生成,不过设置一下基台的坐标系也是可以的,方便之后的配置。因此机械臂部分只需要配置旋转轴即可。旋转轴顾名思义就是一个link围绕着另一个link旋转的轴线。
依次选择参考几何体>基准轴
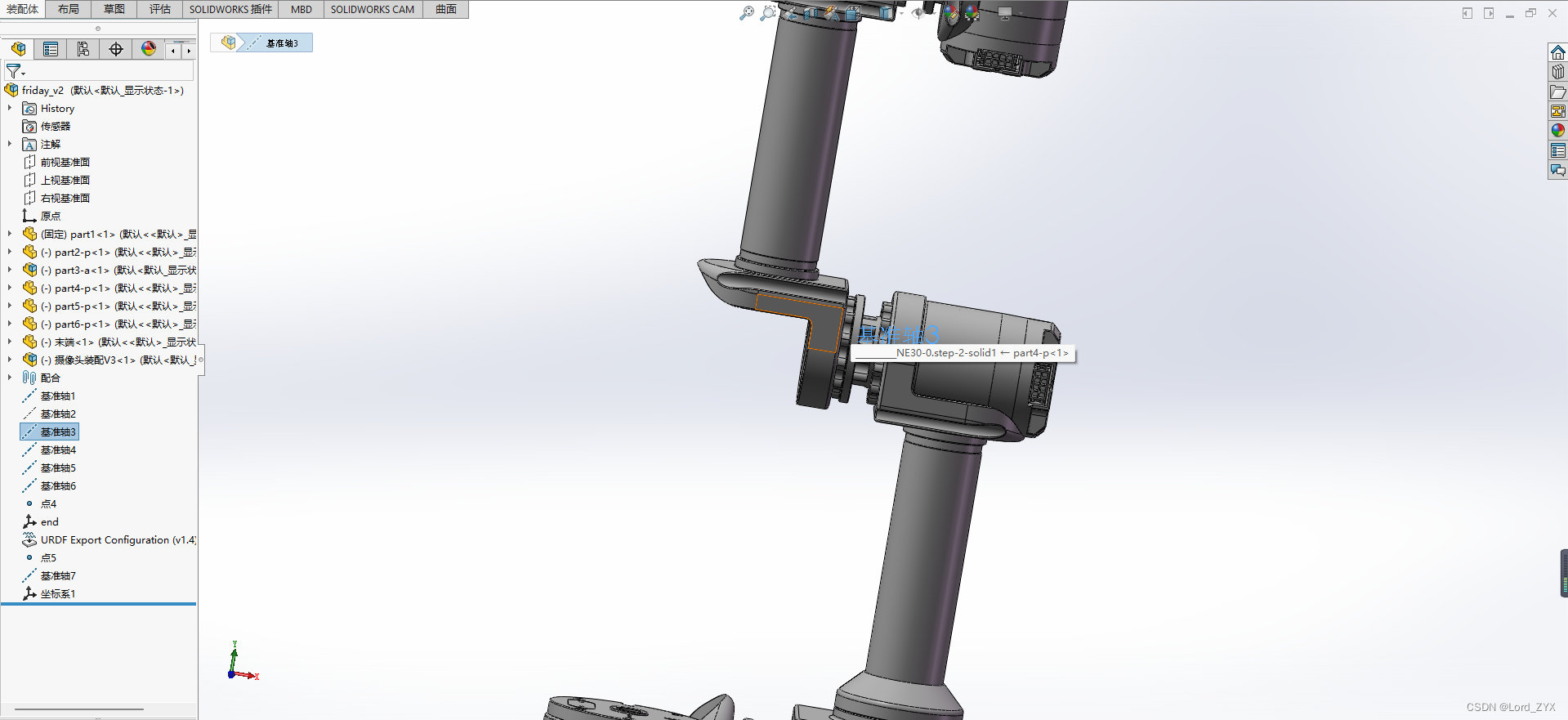
设置link1旋转轴
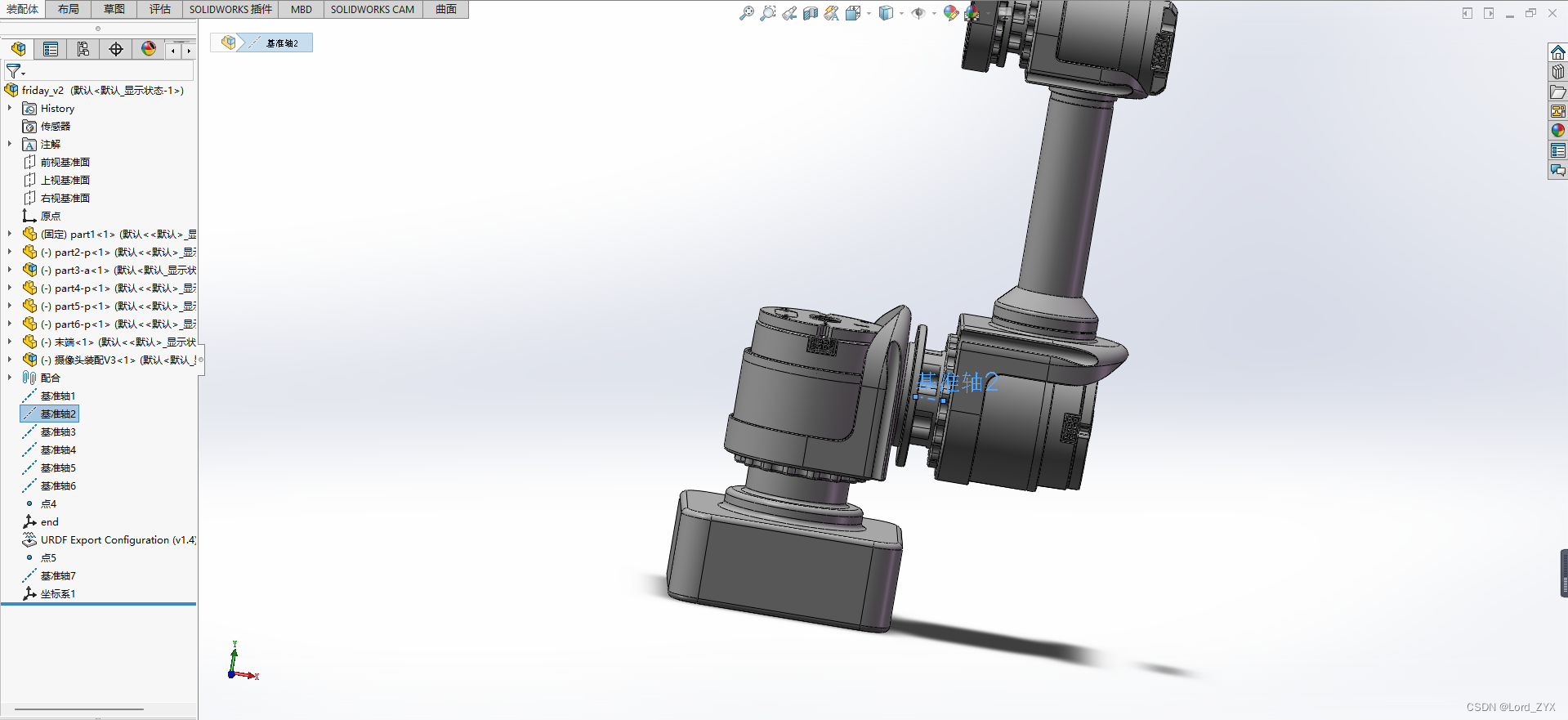
设置link2旋转轴
设置link3旋转轴
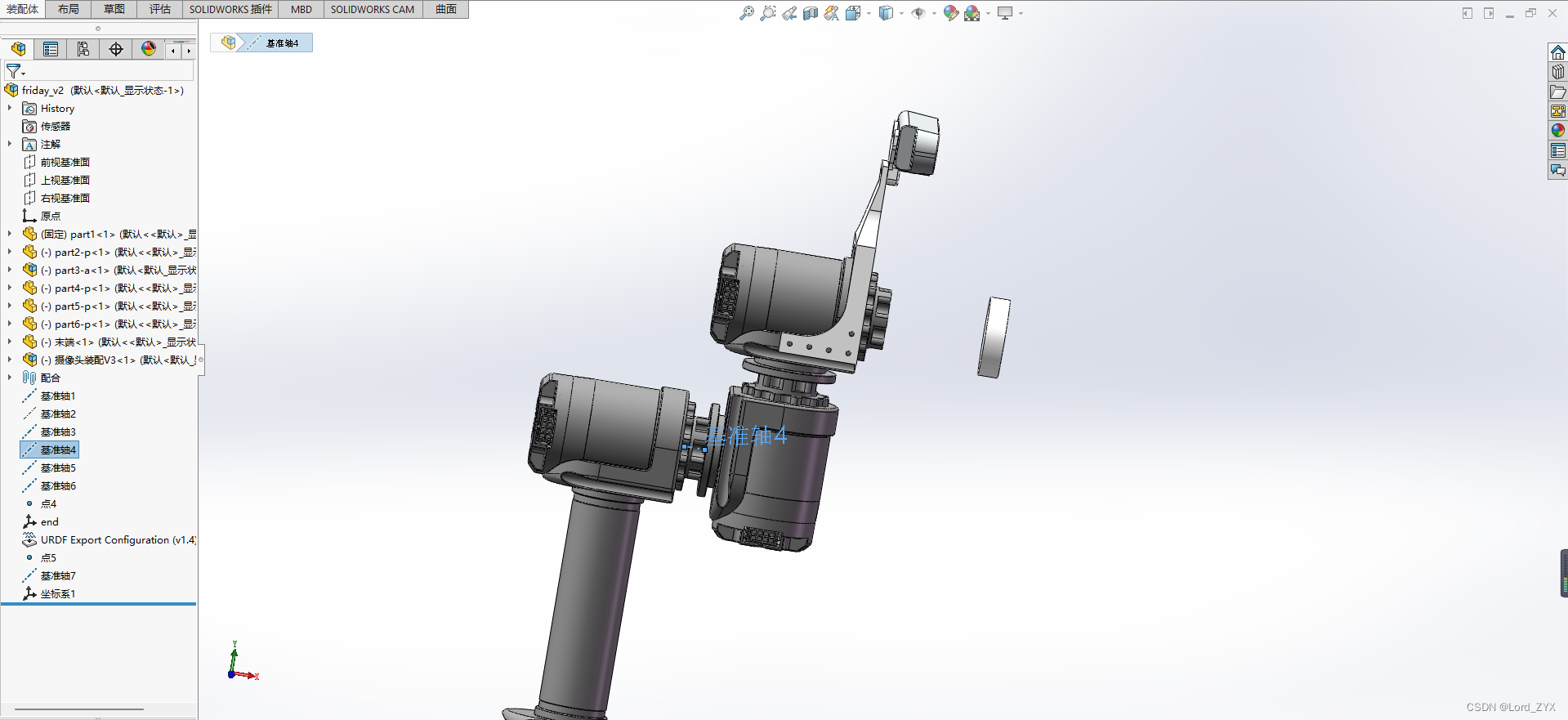
设置link4旋转轴
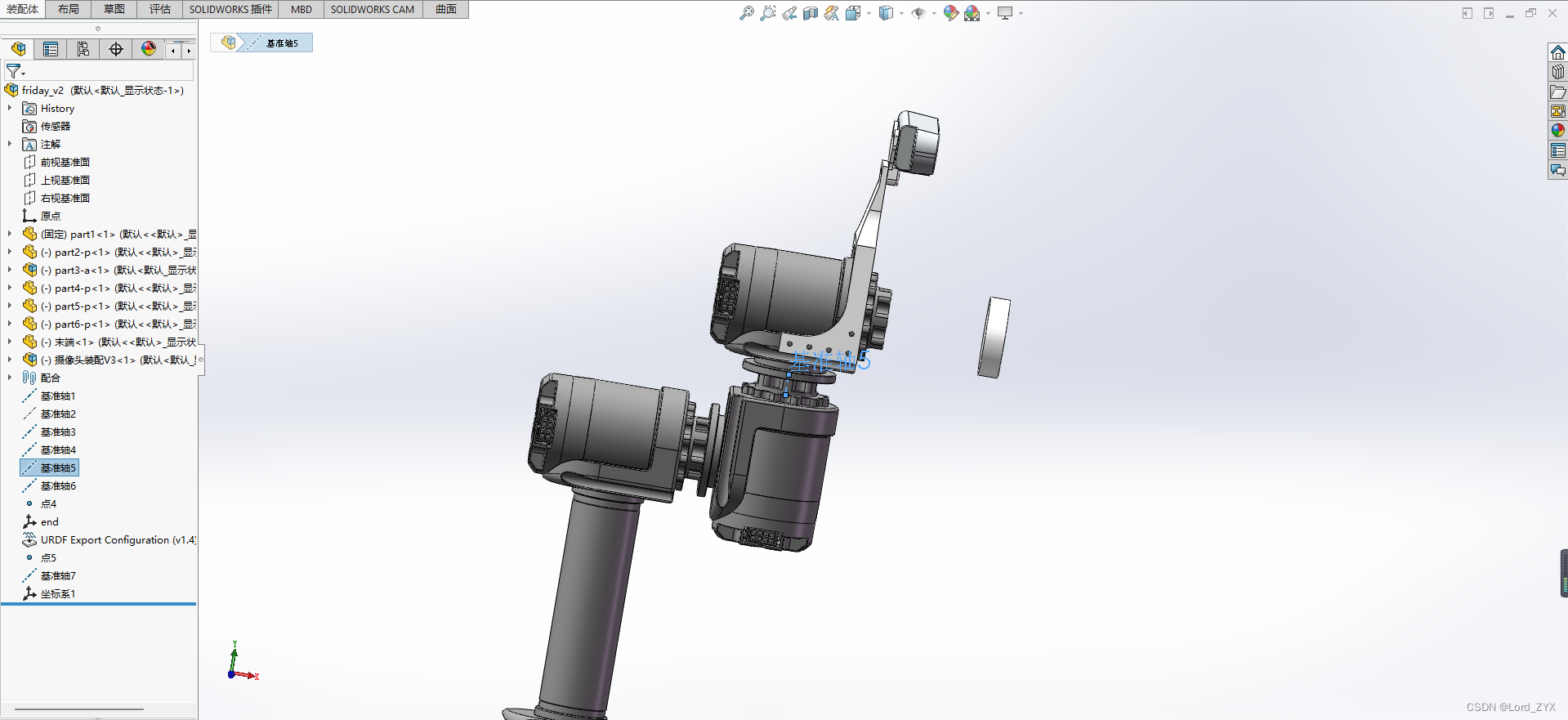
设置link5旋转轴
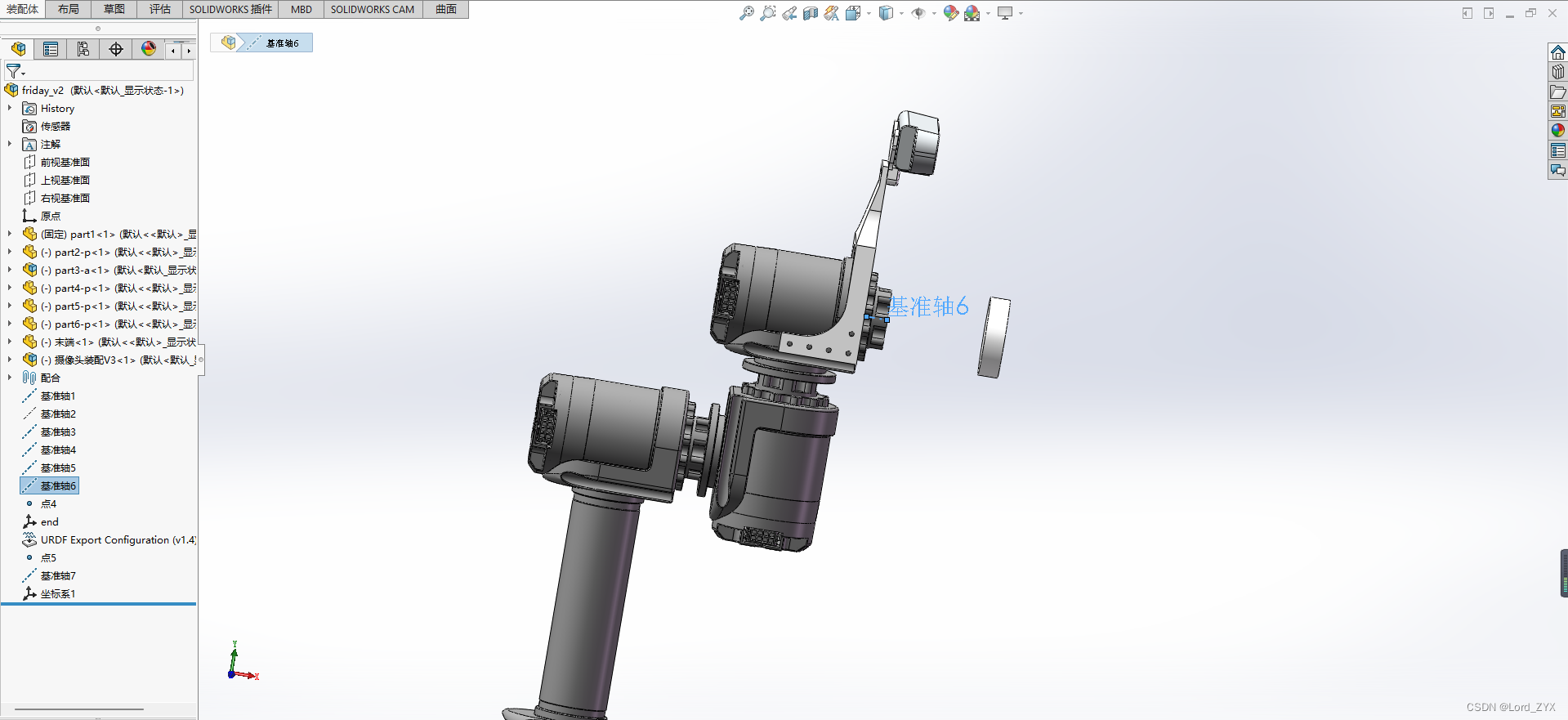
设置旋转轴6,旋转轴6是末端吸盘围绕机械臂末端旋转的轴
设置末端吸盘和摄像头的坐标系
吸盘和摄像头需要坐标系和轴的设置,用于之后的配置
设置吸盘坐标系
设置摄像头坐标系,x轴方向对应摄像头的正对方向。
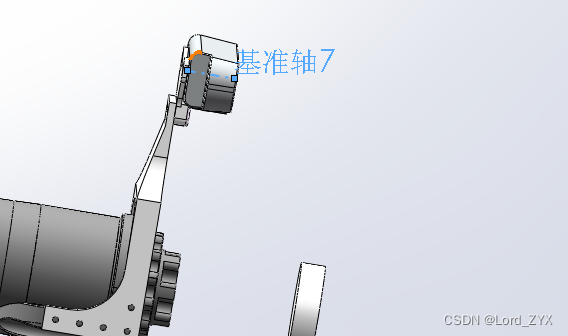
设置摄像头基准轴,基准轴的设置似乎并不影响,这一步可设置可不设置。基准轴的轴向也是摄像头坐标系的x轴方向。
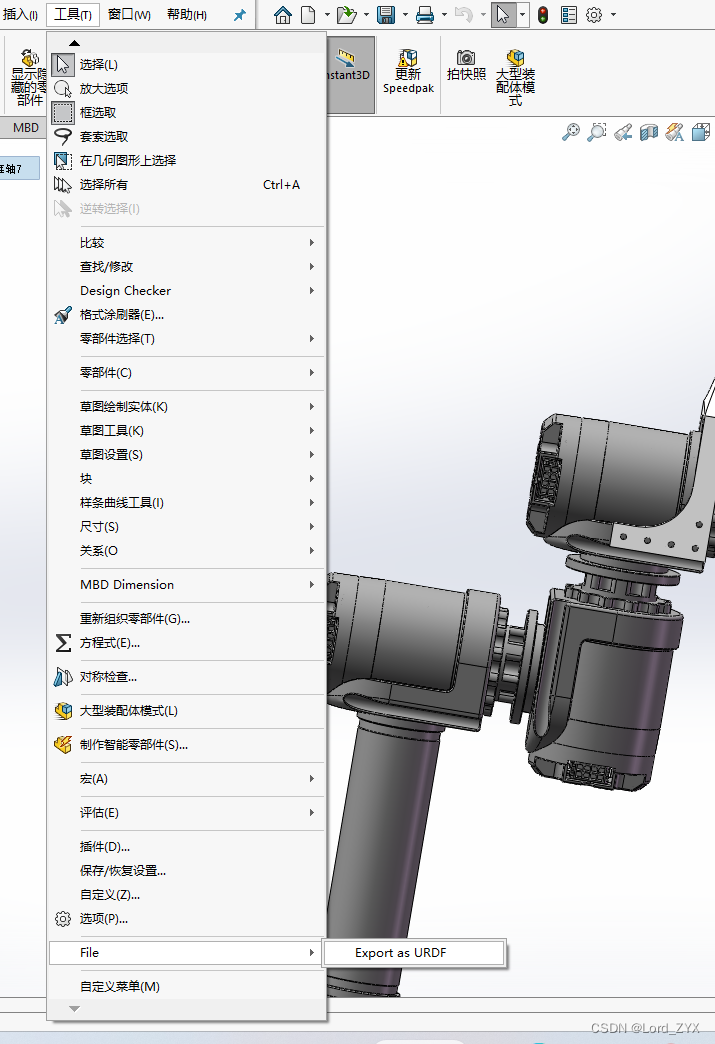
导出URDF
选择工具>file>export as urdf
设置基台为base_link,坐标系选择自动生成
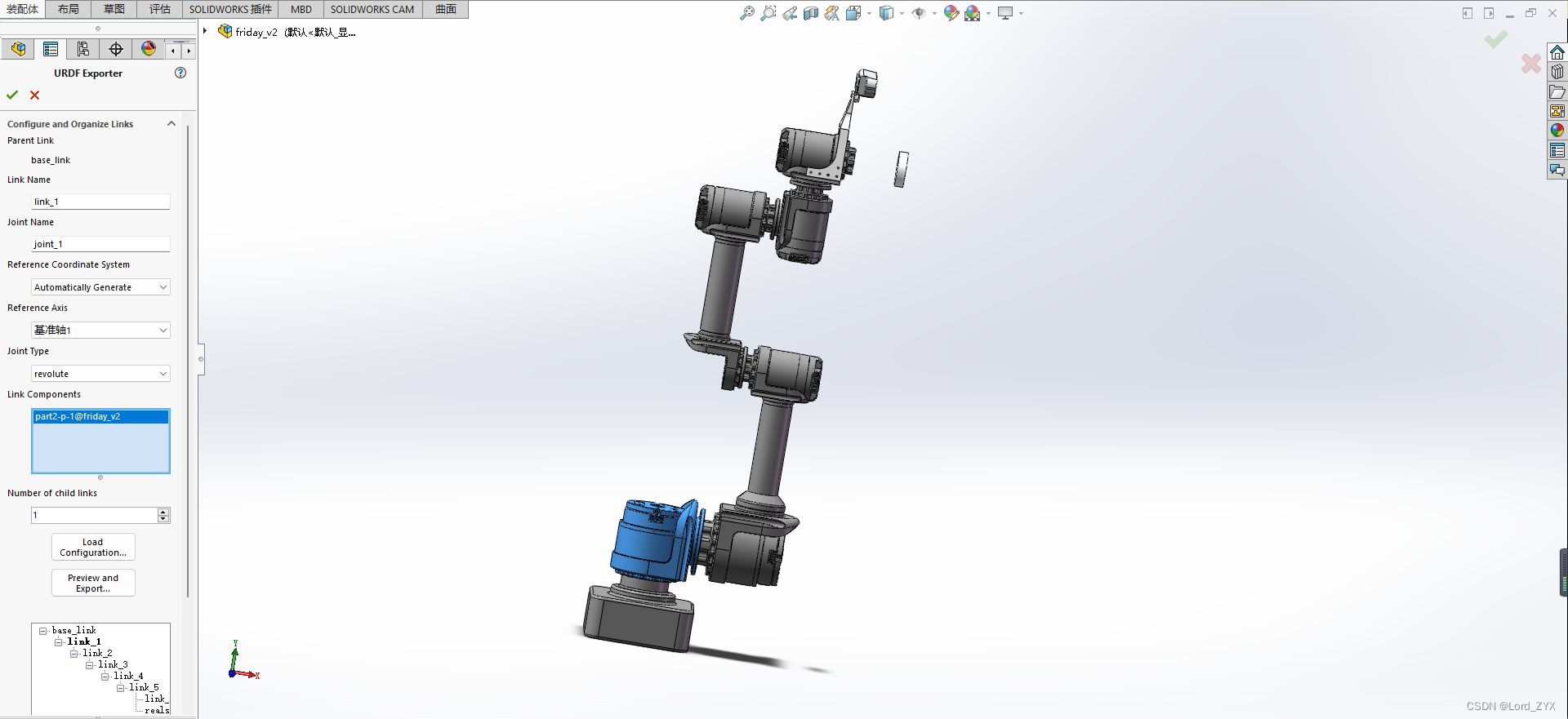
以设置link1为例,设置名字为link_1,关节名为joint_1,坐标系选择自动生成,参考轴选择为之前设置的基准轴1(link1旋转轴),joint type选择revolute,child link选择1,以此为参考以此设置机械臂其它关节。
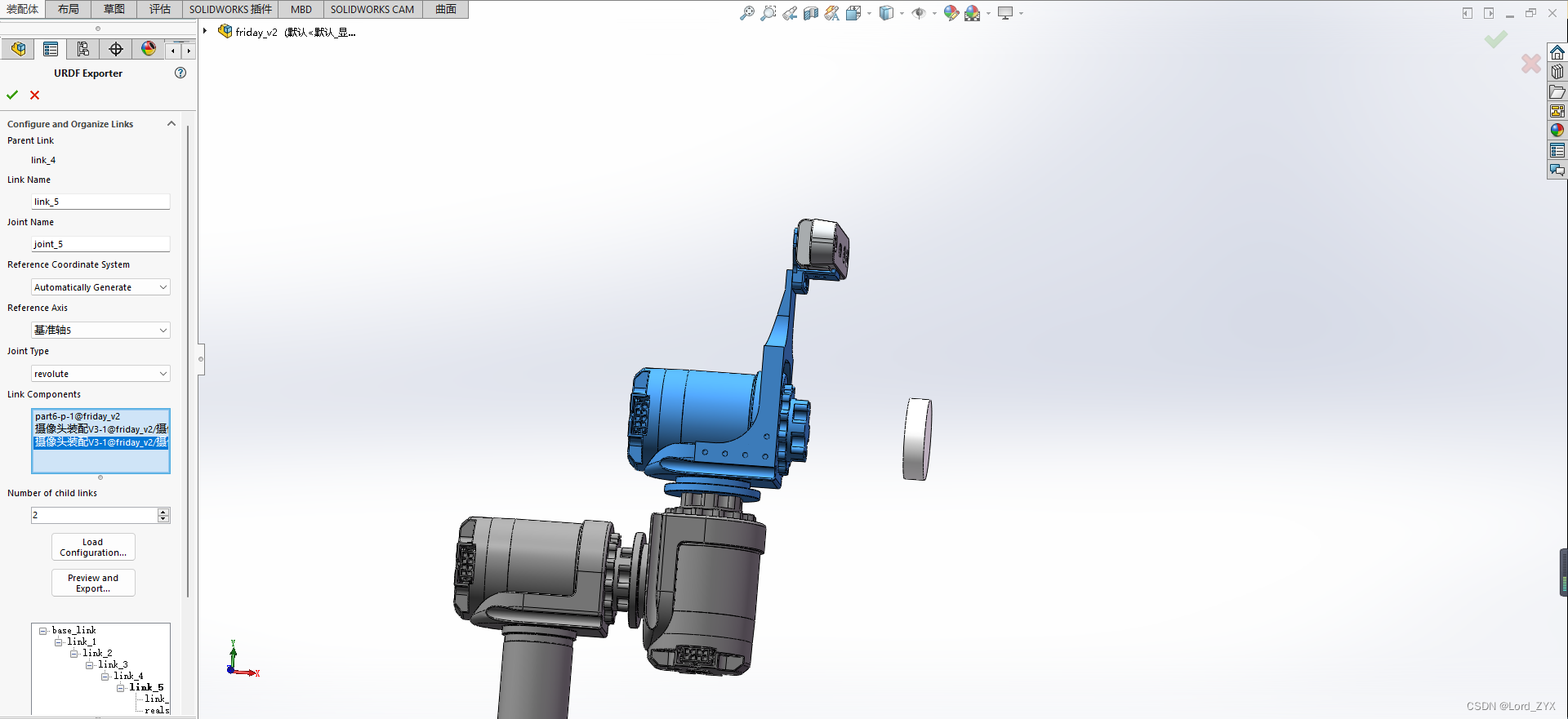
设置link5,可以将机械臂末端电机与摄像头支架合为一体设置为link5,也可将机械臂,摄像头支架,摄像头分开设置,(将摄像头支架删去,直接设置摄像头与机械臂的相对位置关系也行)这里选择合为一体设置link5,child link选择2。
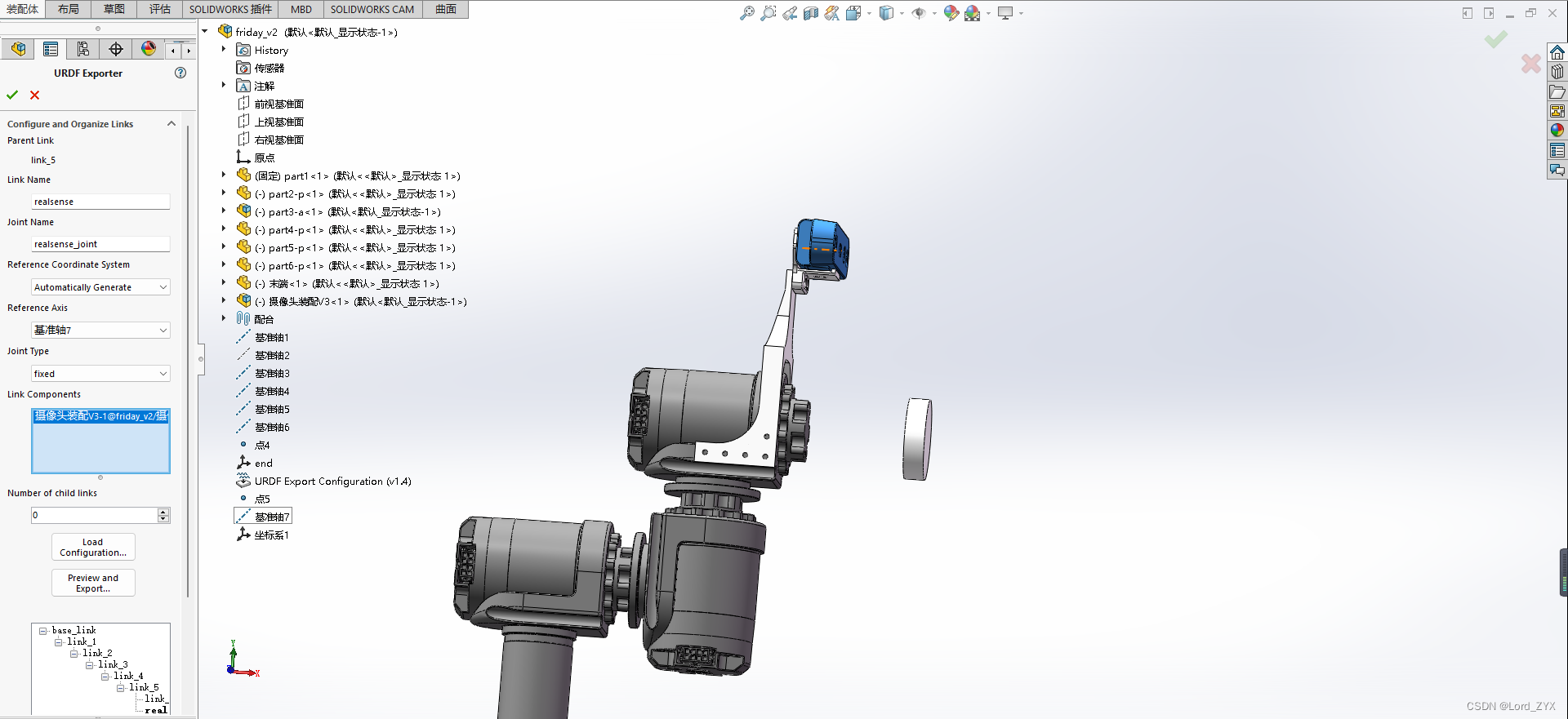
接着设置摄像头,joint type选择为fixed
设置末端吸盘
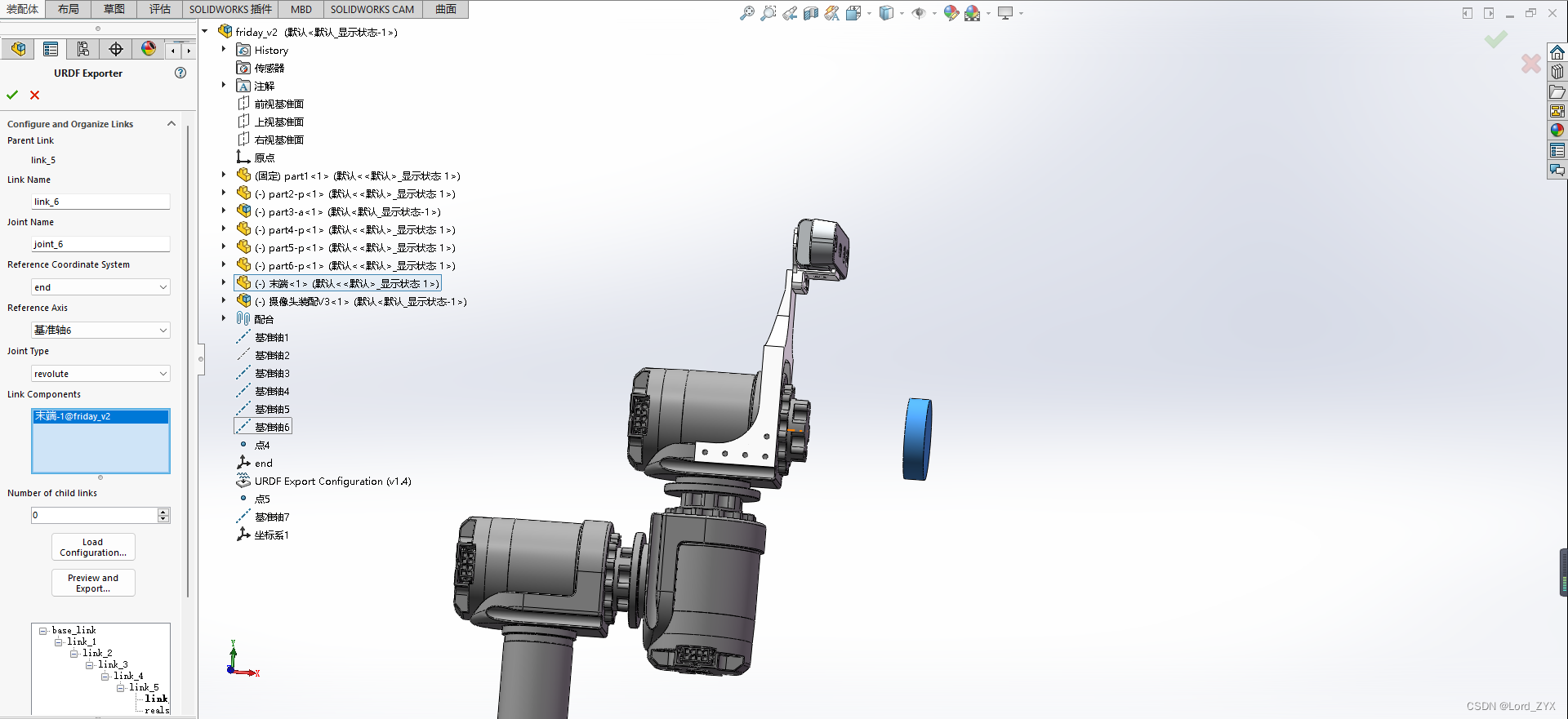
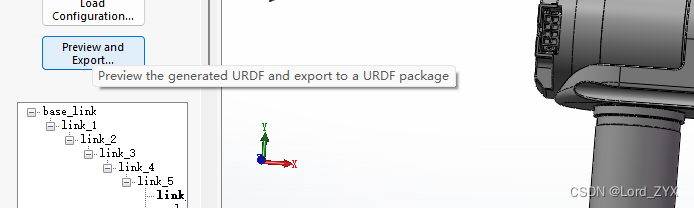
至此已经配置完成导出的前置工作,选择preview and export…按钮,插件会自动生成坐标系以及弹出选项框。
出现该选项框
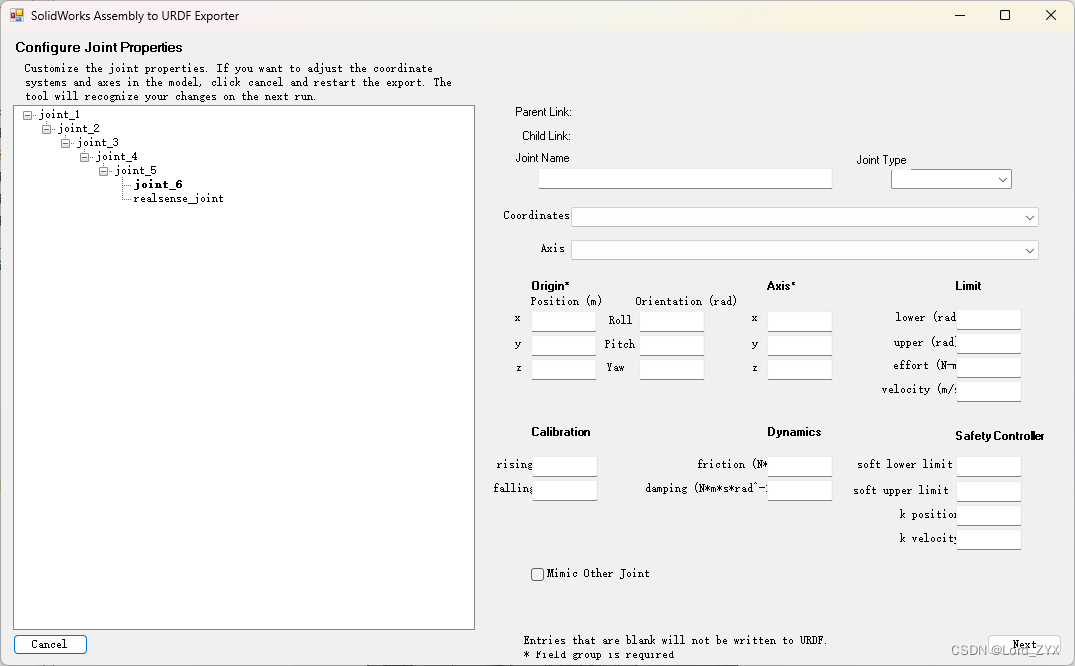
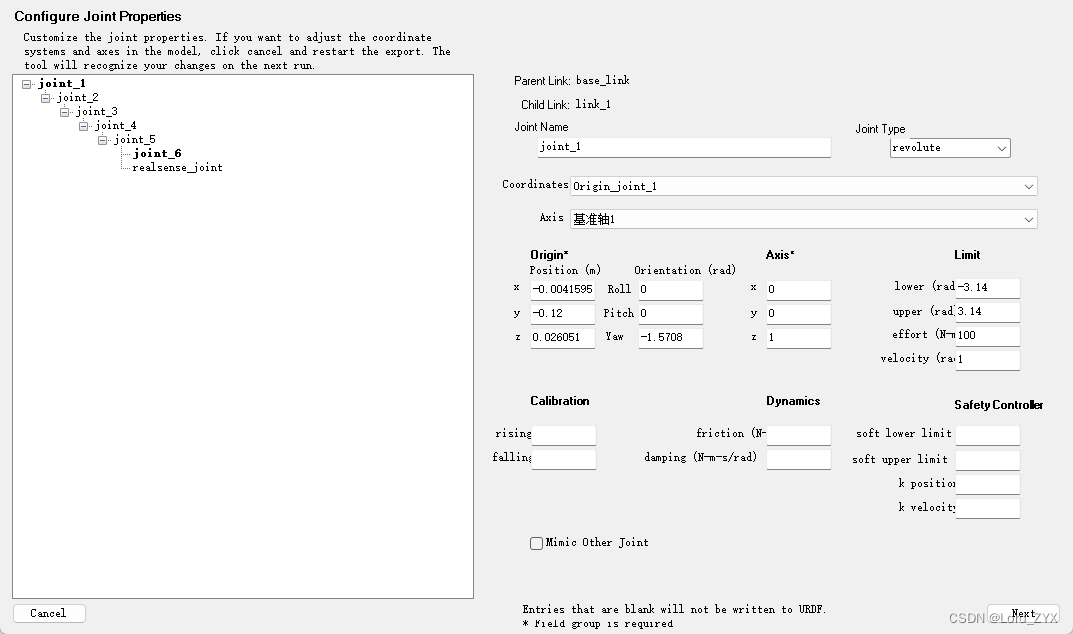
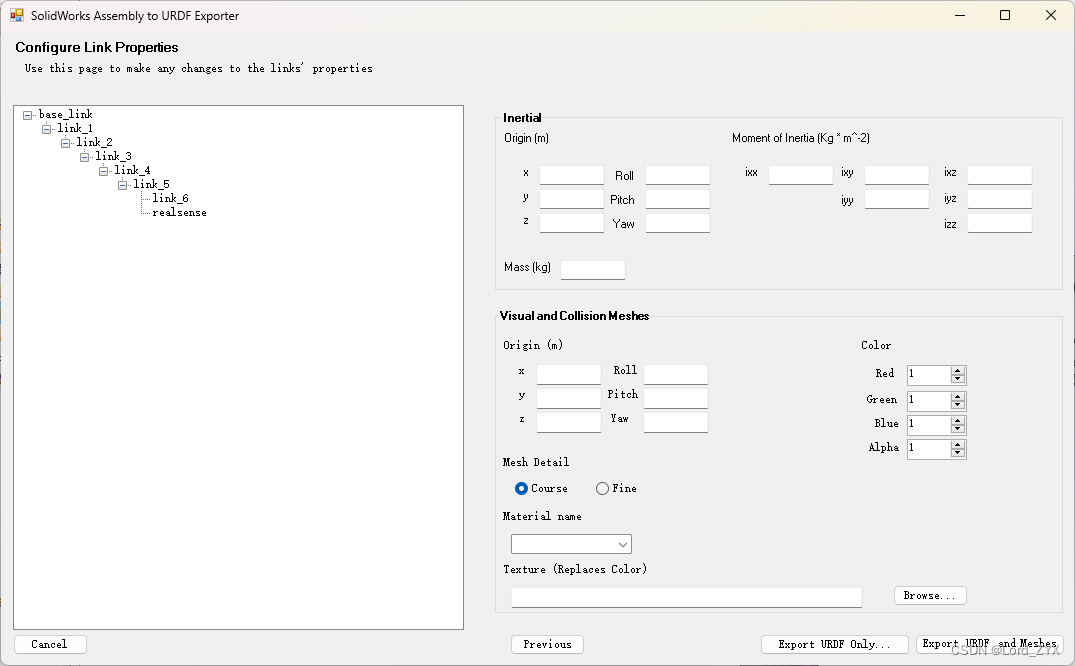
首先对各个joint进行设置,以joint1为例,之前选择的joint type是revolute,则需要对limit标签进行配置,配置内容如图
依次配置完joint,点击next,进入link配置界面,link配置主要与惯性参数和颜色有关,这里无需过多修改,点击export URDF and Meshes,保存为sunday_description,功能包会出现在导出的路径下。
小结
至此,已从模型导出URDF的功能包,下一节将对该功能包进行修改和调整,并在可视化界面中显示。