使用分辨率0.05微米的绝对式光栅尺,导轨螺距5毫米电机。
要实现闭环控制先将 pr001 设置为 6 (全闭环控制模式)
pr004设置为300 (惯量比) pr00.3设置为11(刚性设定) ,因为需要拉动电机故将这两个参数调大
pr008 不需要设置,因为在闭环控制的状态下pr008无效
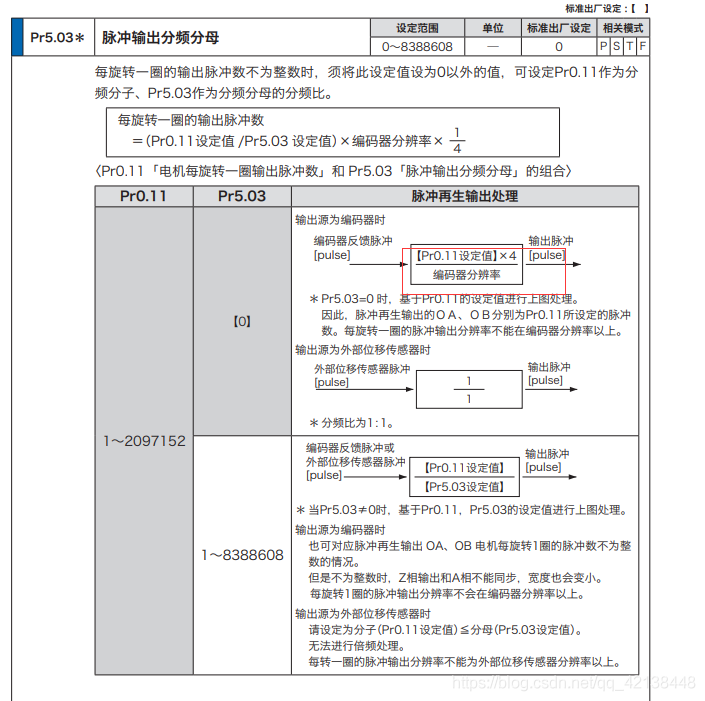
pr011 (后面观察传感器和编码器的反馈再进行设定)
同时设置pr011 和 pr503 能够做到单位的转换,即将pulse转换为mm等实际单位。
pr323设置为2即绝对式传感器。
pr324 设置为编码器的分辨率即8388608 pr325 = 丝杆螺距/光栅尺 本例子 5000/0.05 = 100000
注:若pr324 和 pr325设置错误则会产生 Err25的报错
pr326
和
pr011
根据实际情况设定 :
例如:
当我用手推动电机,若编码器脉冲总和、光栅尺脉冲总和相反则将
pr326
设置为1(即设置反方向)。如下图所示:

例如:

当固高控制卡上显示的实际脉冲和规划脉冲对不上时,应考虑调节pr011 ,通过jog模式使能让电机转一圈,得到实际位置为1w 而规划位置为10w。此时需要知道一个概念,规划位置的反馈值是通过光栅尺得到,实际位置的反馈值是通过编码器获得。而在全闭环控制模式中,是以光栅尺的反馈为基准的,故我们转一圈大概走10w个脉冲。再参考pr503发现是四倍频。故将pr011设置为25000。最终电机输出的脉冲为25000*4 = 100000。