为什么需要设定工具的本地原点
由于用户自定义的3D模型由不同的3D绘图软件绘制而成,并转换成特定的文件格式,此时将3D模型导入到RobotStudio软件中便会出现
图形特征丢失
的情况(即图形没有了坐标点,无法进行图形之间的配合使用),在本任务中将特意选取一个缺失图形特性的工具模型,在创建的过程中我们会遇到类似的问题
下面我们介绍针对此类问题的解决方案,即
导入一个外部的末端执行器模型,且设定此末端执行器的
本地原点
,使其具有和系统库里默认的工具同样的属性和图形特征,并将其安装在机器人末端上,且使用这个自定义的末端执行器工具完成工件表面待处理点位的定位
创建工具坐标系的过程一览:
创建新工具
导入几何体
选中几何体右键单击然后点击两点放置
设定本地原点
设定位置
再次设定位置
设定本地坐标
创建工具坐标系框架
建模
创建框架
设定为表面法线方向
设定位置
创建工具
安装工具
进行轨迹移动
设定工具的本地原点
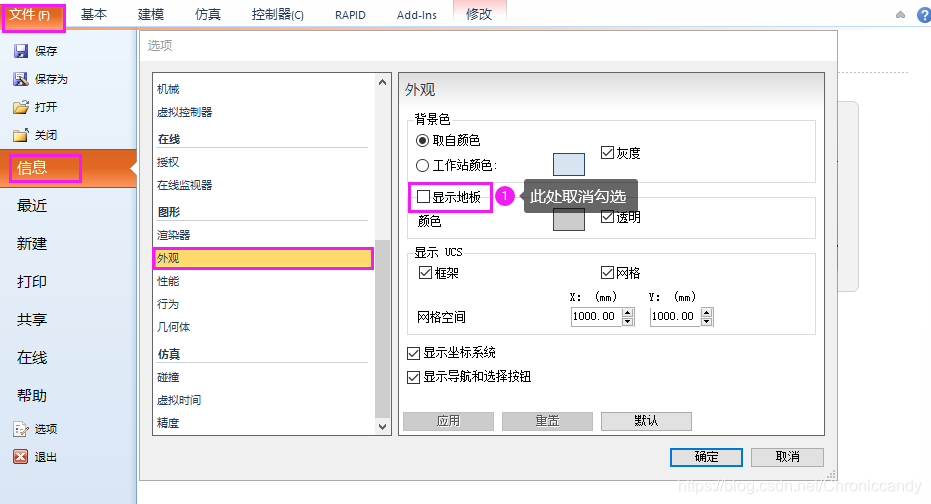
隐藏仿真环境地面
在图形处理的过程中,为了避免工作站地面特征影响视线以及捕捉,我们先将地面设定为隐藏
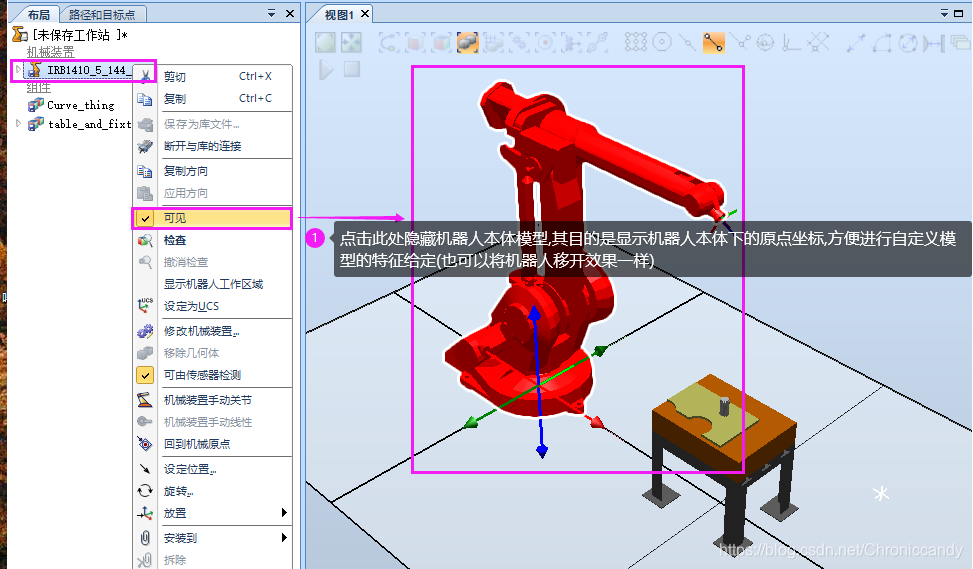
配置一个机器人基础环境并隐藏机器人本体模型
创建机器人系统
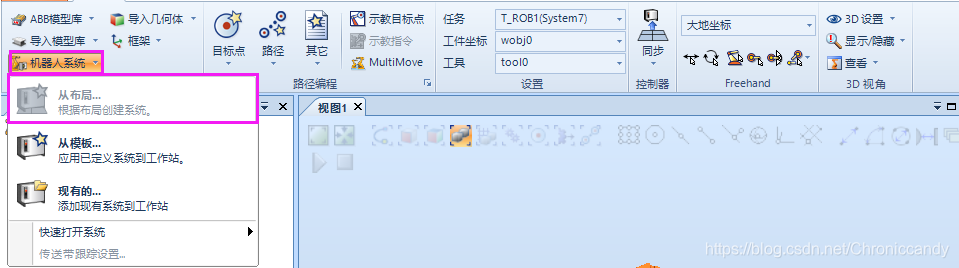
注意:
从
布局
创建机器人系统
的时候,一定要保证
布局中的模型和集合体是已经具有
图形特征和坐标系信息的几何体和模型
,如果布局中存在没有图形特征的几何体(例如我们下方要导入的几何体),此时
将无法成功创建机器人系统!
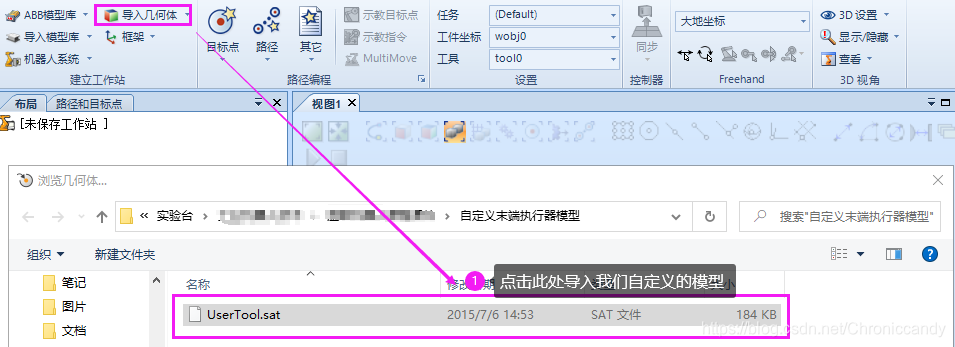
导入自定义的末端执行器模型

安装自定义工具模型的安装原理为:
首先将
工具模型的本地坐标系
与
机器人法兰盘坐标系Tool0重合
,
工具末端的
工具坐标系框架
即作为
机器人的工具坐标系
,所以需要对此工具模型做以下两步图形处理:1.首先在
工具法兰盘端创建
本地坐标系框架
2.之后在
工具末端创建
工具坐标系框架
.这样自建的工具就有了跟系统库里默认的工具同样的属性了
在工具法兰盘端面创建本地坐标系框架
使自定义工具模型的法兰盘所在面与大地坐标系正交
首先
放置
工具模型的位置,使其法兰盘所在面与大地坐标系
正交
,以便于处理坐标系的方向

将工具法兰盘所在平面的上边缘与工作站大地坐标系的X轴重合
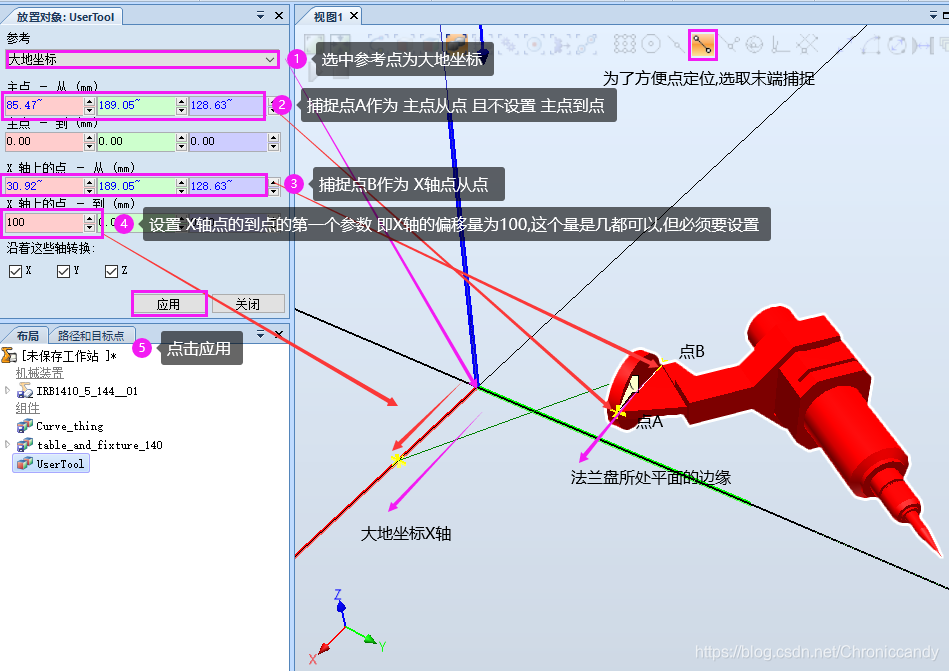
二点法放置后,此时导入的工具有了坐标系这个图形特征,且其坐标系与大地坐标系对齐,此时法兰盘所在面与大地坐标系
正交
,接下来处理坐标系的方向
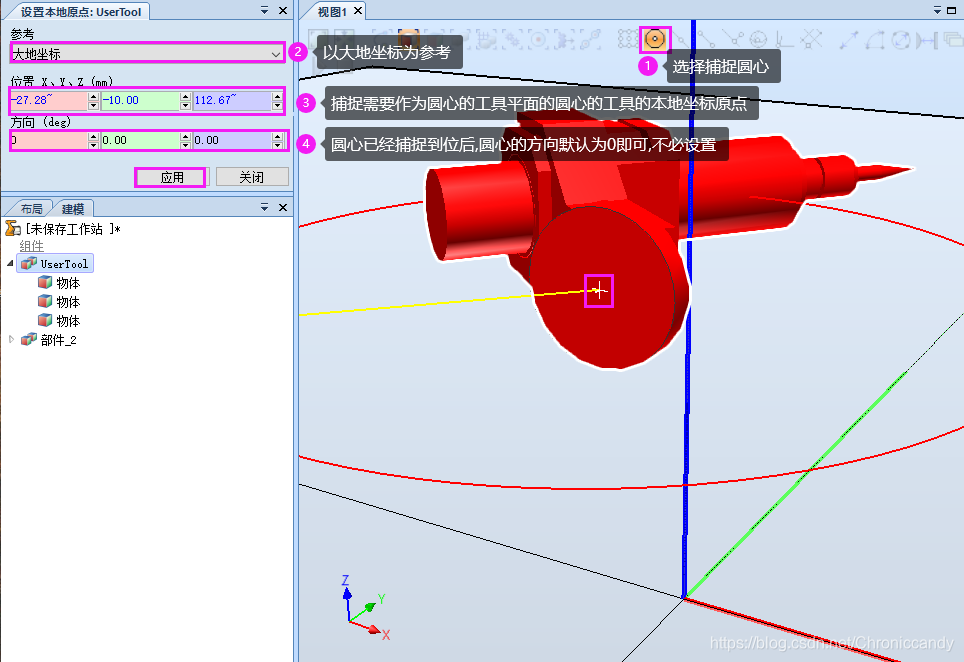
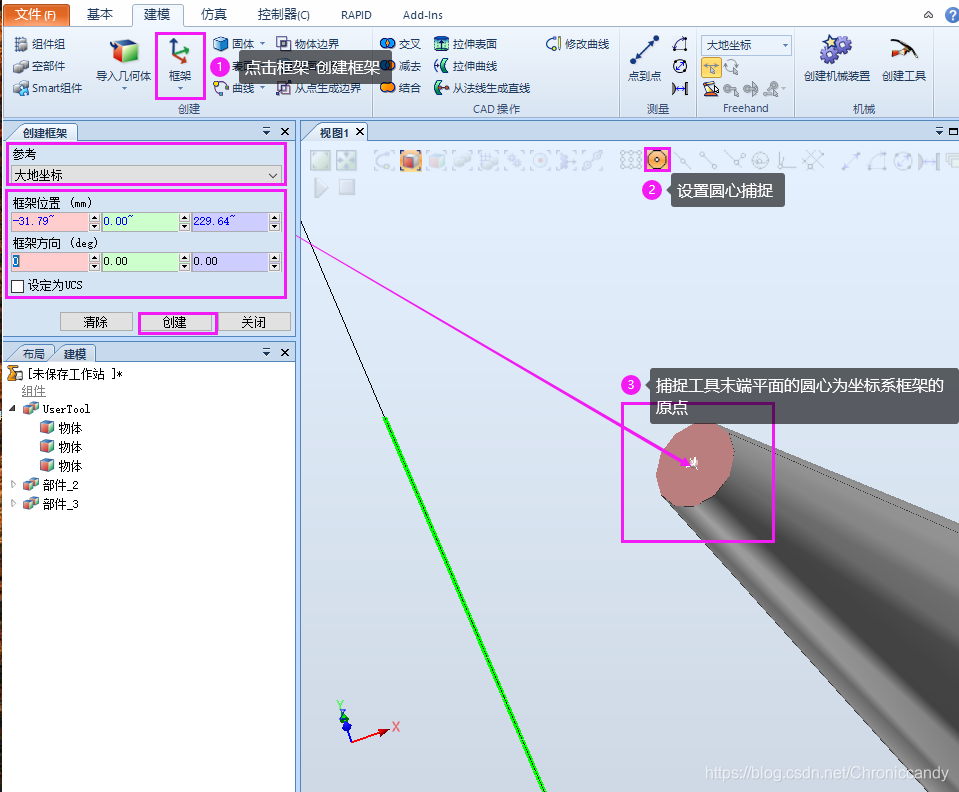
设置自定义工具的本地原点
在需要自定义工具需要设置原点的面上设置边界(方便原点的定位)


捕捉工具面圆心并作为工具的本地坐标

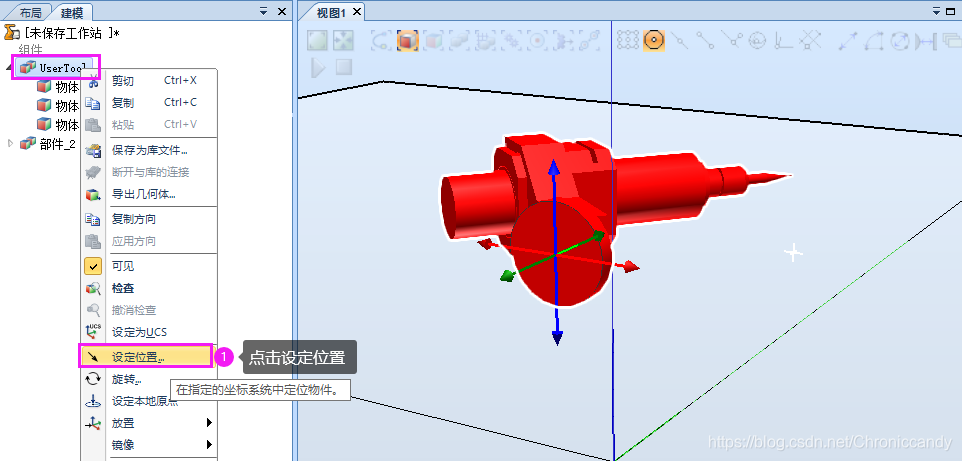
设置自定义工具的位置到大地坐标原点

设置自定义工具坐标系的方向
此时,工具模型的本地坐标系的原点已经设定完成,但
工具的本地坐标系的方向
还需进一步设定,这样才能保证当安装到机器人法兰盘末端时能够保证其工具的方向和姿态也是其所想要的
如何设定工具的本地坐标系的方向:
使工具
法兰盘表面和大地水平面
重合,工具
末端
位于
大地坐标系X轴负方向

再次设置自定义工具坐标系的原点
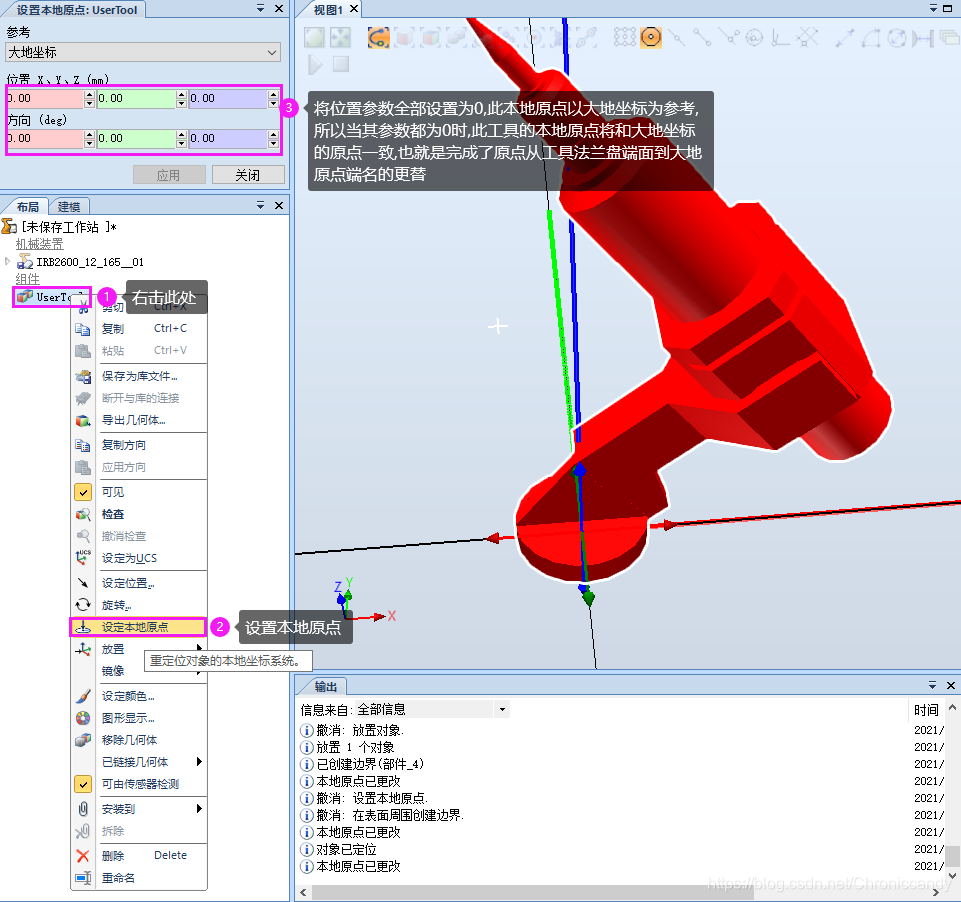
此时,该工具模型的本地坐标系的原点以及坐标系的方向就已经全部设定完毕了,接下来我们开始创建工具坐标系的框架
设定工具的坐标系框架(建立工具末端坐标框架)
为什么我们需要建立工具末端坐标框架?
因为我们需要在机器人末端执行器(即我们导入的工具模型)的末端建立一个坐标,用于
对
待加工工件的目标点
进行定位
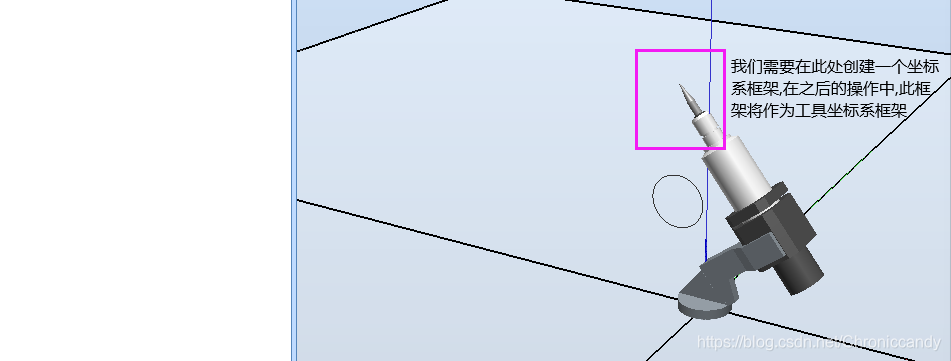
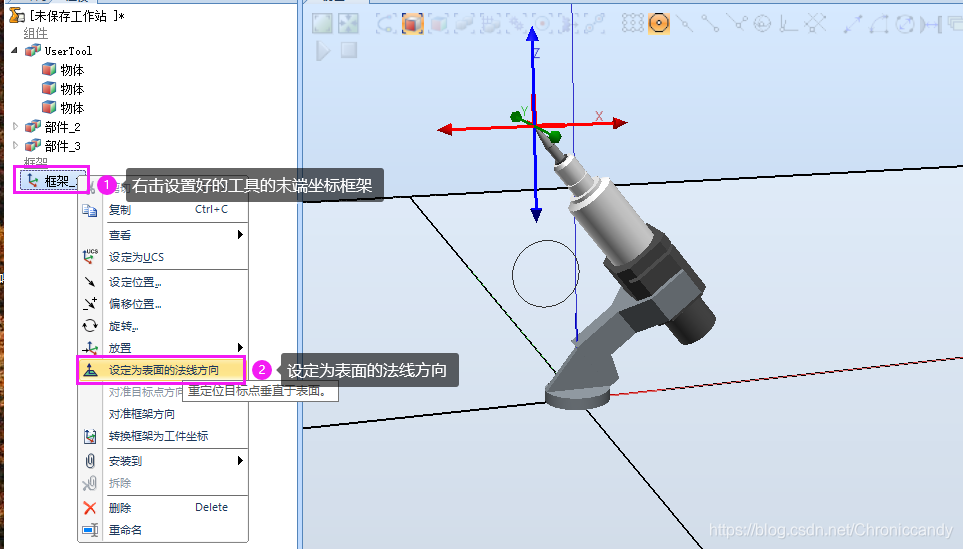
由于创建坐标系框架时需要捕捉原点,而此时工具末端没有图形特征,其原点难以捕捉,所以此时我们先进行表面捕捉
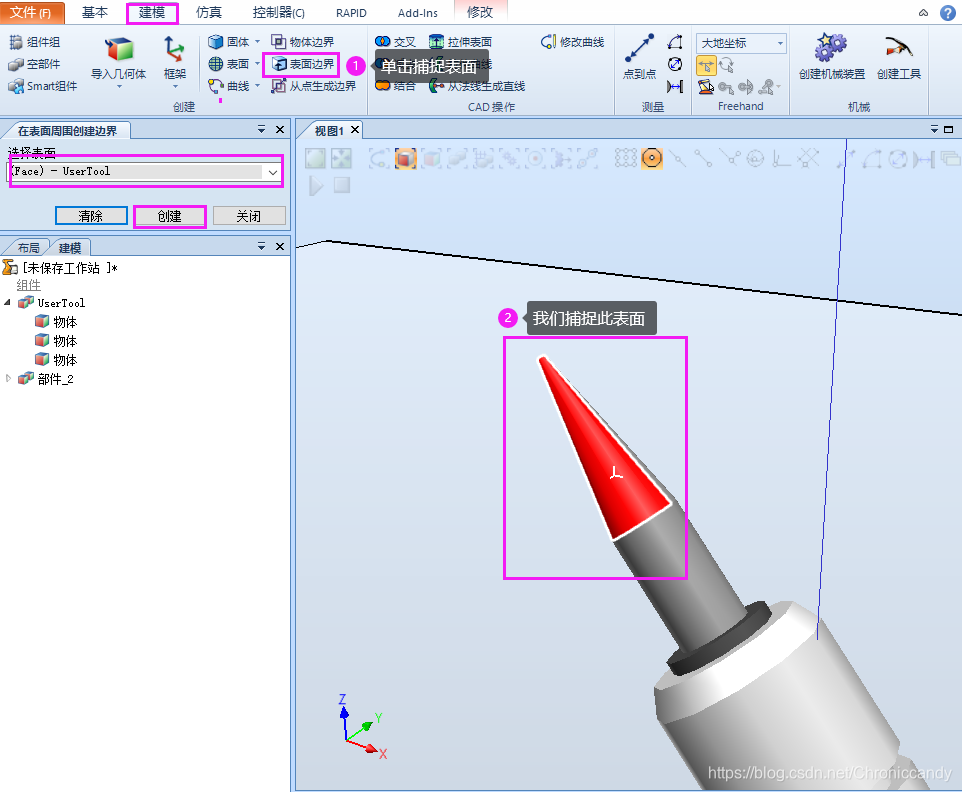
设置自定义工具末端坐标系为表面的法线方向
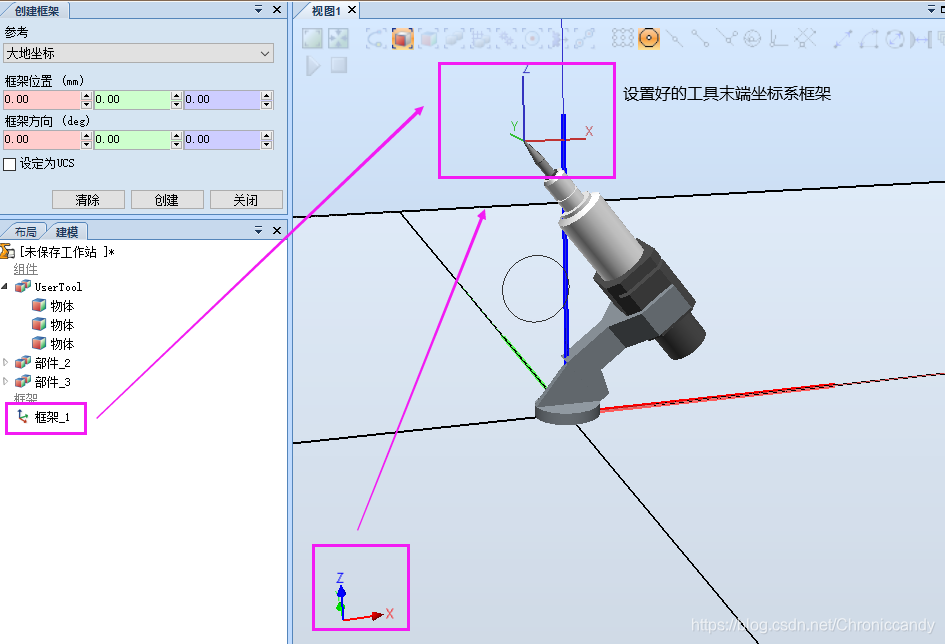
此时我们已经生成了工具的末端的坐标系框架,此时我们设定此工具坐标系的方向,
一般期望的
坐标系的Z轴
是与
工具末端表面垂直
(即末端指针的中线和末端面垂直)

此时我们已经完成了工具末端坐标系框架Z轴方向的设定,至于其X轴和Y轴的朝向按照经验设定即可,只要保证前面设定的模型本地坐标系是正确的,XY采用默认方向即可
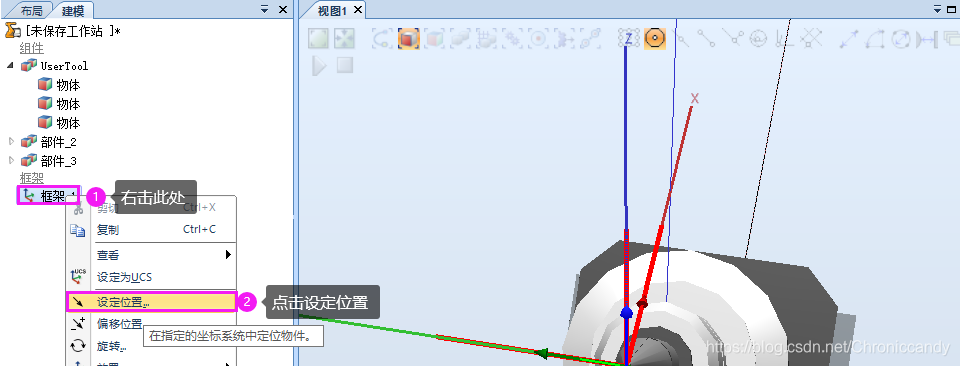
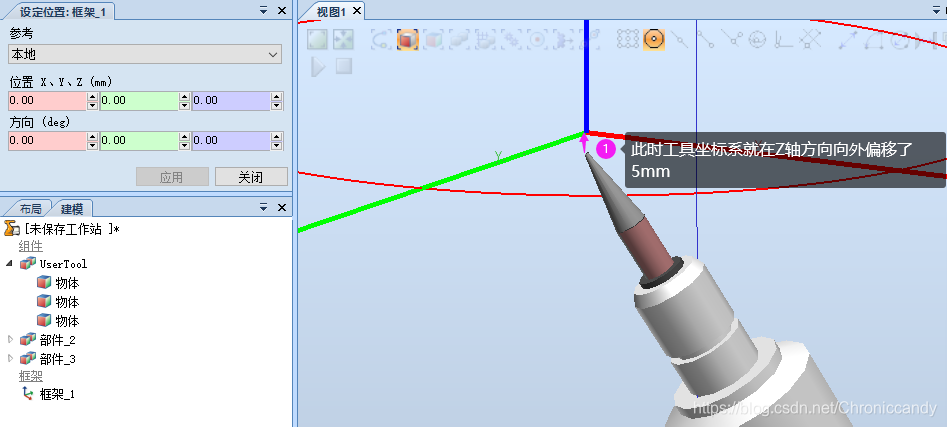
设置自定义工具末端坐标系Z轴偏移位置
在实际应用过程中,工具坐标系原点一般与工具末端有一段间距,例如
焊丝伸出的距离,或者激光切割枪,涂胶枪
需要与加工表面保持一段距离,在此处,我们只需
将工具末端坐标系框架本身的
Z轴正向移动一定距离
就能够满足实际需求

创建工具
此时我们已经将导入工具模型的所有图形特征建立完毕,此时我们需要将导入的工具模型创建为系统工具



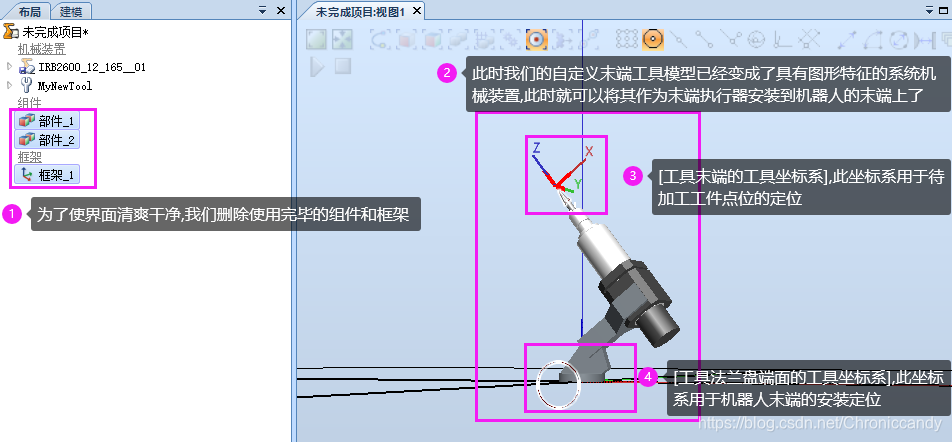
安装自定义的工具到机器人末端上
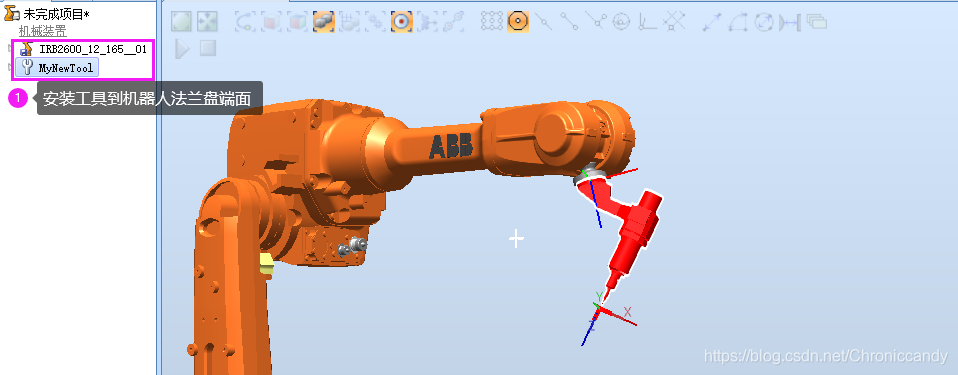

运行结果:
详见:
创建机器人用工具🔍
