上一篇写了地图的格式,主要是由-1,0,1组成的矩阵。有了地图,还要有初始点和目标点的位置才能进行路径规划。
位置获取
初始点和目标点主要是矩阵中的位置,但是从rivz中获取的是地图坐标,所以获取之后还要进行转换成栅格地图坐标。
查看初始点发布的话题和发布者
我选择的话题是/amcl_pose,接收的数据类型是PoseWithCovarianceStamped
查看数据类型:
[geometry_msgs/PoseWithCovarianceStamped]:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float64[36] covariance
对于最初始的路径规划,我们只需要x,y的坐标,其他的后续才能用到。
获取初始点
from geometry_msgs.msg import PoseWithCovarianceStamped
def getIniPose(self):
'''
获取初始坐标点
'''
self.IniPose = rospy.wait_for_message("/amcl_pose", PoseWithCovarianceStamped,timeout=None)
self.init_x = self.IniPose.pose.pose.position.x
self.init_y = self.IniPose.pose.pose.position.y
self.start_point = self.worldToMap(self.init_x,self.init_y)
打印出来(0.03650604122402327 -0.025128637246311626)很显然这不是我们想要的点的格式。这里面的worldToMap函数是rviz坐标到矩阵位置的转换。
查看目标点发布的话题和发布者
选择的话题是/move_base_simple/goal, 数据类型为PoseStamped,这个获取的点就是在rviz菜单栏中选择的那个粉色的箭头(2D nav goal)标注的点
[geometry_msgs/PoseStamped]:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
同理,这里只需要x,y
获取目标点
from geometry_msgs.msg import PoseStamped
def getTarPose(self):
'''
获取目标坐标点
'''
self.TarPose = rospy.wait_for_message("/move_base_simple/goal", PoseStamped,timeout=None)
self.tar_x = self.TarPose.pose.position.x
self.tar_y = self.TarPose.pose.position.y
self.final_point = self.worldToMap(self.tar_x,self.tar_y)
rviz地图坐标和栅格坐标的转换
获取地图大小
由于我的地图绘制完有大量的没有用到的区域,所以我自行给它截图了,截完之后机器人和地图的相对位置变了,需要重新调整配置文件(麻烦),而且也要测量一下地图尺寸。
这里可以用rviz箭头获取目标点的方法测量四个角。
原理
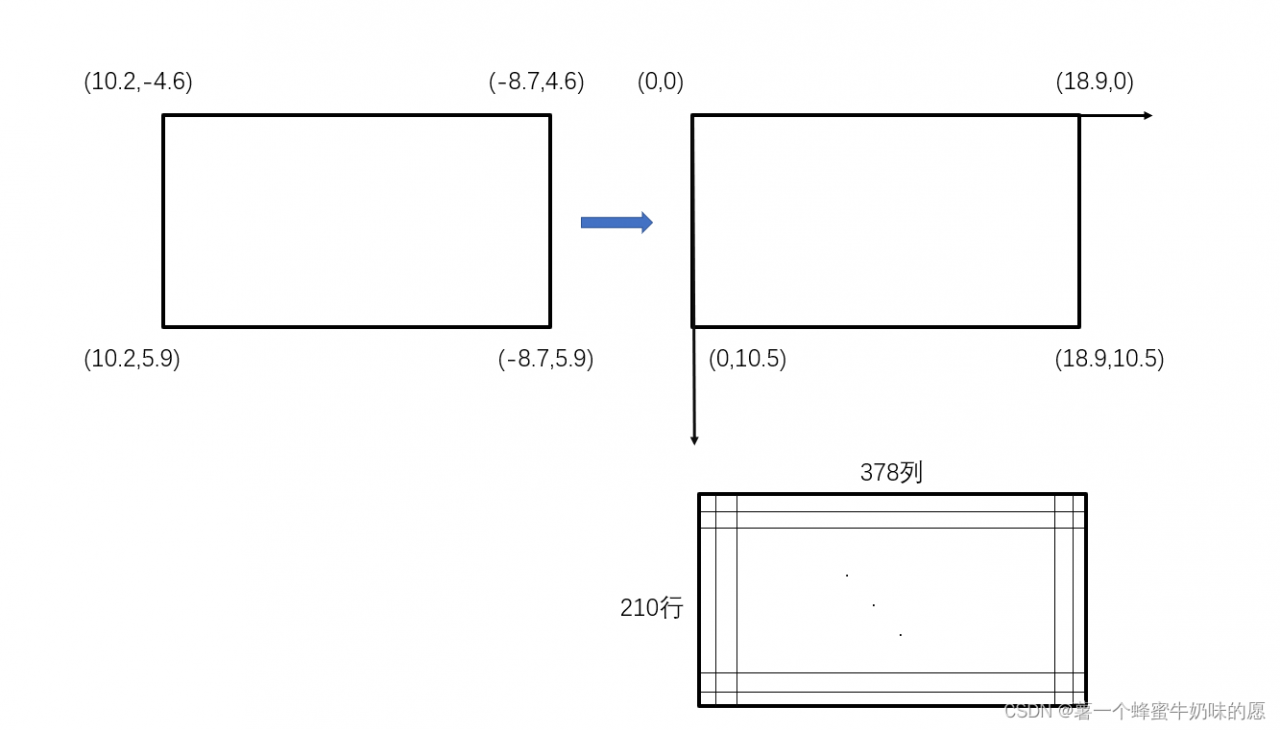
经过测量,获取到地图的四个点坐标如下图,因为矩阵是左上角为0行0列,为了和矩阵对应,所以我们要把当前坐标系移动到左上角,这样就有转换公式:
xnew = 10.5 – x
ynew = -(-4.6-y)
下一步,任意给定(xnew,ynew),如何找到对应的矩阵所在的位置。
这里就要用到分辨率,如果不知道分辨率是什么,不妨根据这个例子看看。可以通过获取矩阵的长宽,得到其是一个(210,378)的矩阵块。
我们把这两个矩阵的长和宽分别做比:
10.5/210 =0.05
18.9/378 = 0.05
这个0.05就是分辨率,也就是一个矩阵格子对应多少米,而且应该是向下取整,所以转换公式为:
x_m = (10.5 – x) / 0.05
y_m = -(-4.6-y) / 0.05
代码实现
pixwidth = 10.197194 #10.2
pixheight = 4.625010 #4.6
def worldToMap(self,x,y):
#将rviz地图坐标转换为栅格坐标
#这里10.2和-4.6需要自动添加,目前不知道怎么添加
mx = (int)((pixwidth-x) /self.resolution)
my = (int)(-(-pixheight-y) /self.resolution)
return [mx,my]
这样上游所有的数据就处理好了。