本篇文章主要讲pcl中如何生成点云AABB包围盒和OBB包围盒
包围盒定义:
包围体是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的主要的目的是快速进行碰撞检测。包围体类型包括球体、轴对齐包围盒(AABB)、有向包围盒(OBB)等。
这里主要介绍AABB和OBB:
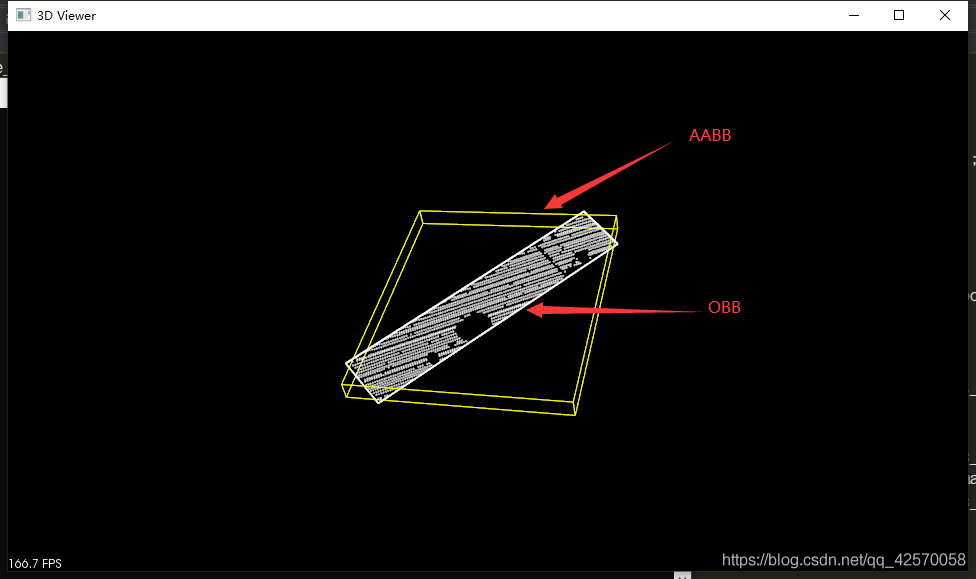
轴对齐包围盒(AABB)就是包围盒对齐坐标轴,如上图黄色的包围盒;
有向包围盒(OBB)就是根据物体本身的几何形状来决定盒子的大小和方向,盒子无须和坐标轴垂直,这是一种最为选择最合适、紧凑的包围盒,如上图白色包围盒。
在pcl教程中提供了两种包围盒的生成方法:
使用 pcl::MomentOfInertiaEstimation 就可计算得到两种包围盒。
主要代码:
#include <pcl/features/moment_of_inertia_estimation.h>
#include <vector>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <boost/thread/thread.hpp>
int main (int argc, char** argv)
{
if (argc != 2)
return (0);
//读取
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ> ());
if (pcl::io::loadPCDFile (argv[1], *cloud) == -1)
return (-1);
//实例化一个Momentof...
pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor;
feature_extractor.setInputCloud (cloud);
feature_extractor.compute ();
//声明一些必要的变量
std::vector <float> moment_of_inertia;
std::vector <float> eccentricity;
pcl::PointXYZ min_point_AABB;
pcl::PointXYZ max_point_AABB;
pcl::PointXYZ min_point_OBB;
pcl::PointXYZ max_point_OBB;
pcl::PointXYZ position_OBB;
Eigen::Matrix3f rotational_matrix_OBB;
//计算描述符和其他的特征
feature_extractor.getMomentOfInertia (moment_of_inertia);
feature_extractor.getEccentricity (eccentricity);
feature_extractor.getAABB (min_point_AABB, max_point_AABB);
feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB);
//显示
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->setBackgroundColor (0, 0, 0);
viewer->addCoordinateSystem (1.0);
viewer->initCameraParameters ();
viewer->addPointCloud<pcl::PointXYZ> (cloud, "sample cloud");
//addCube
viewer->addCube (min_point_AABB.x, max_point_AABB.x, min_point_AABB.y, max_point_AABB.y, min_point_AABB.z, max_point_AABB.z, 1.0, 1.0, 0.0, "AABB");//AABB盒子
Eigen::Vector3f position (position_OBB.x, position_OBB.y, position_OBB.z);
Eigen::Quaternionf quat (rotational_matrix_OBB);
viewer->addCube (position, quat, max_point_OBB.x - min_point_OBB.x, max_point_OBB.y - min_point_OBB.y, max_point_OBB.z - min_point_OBB.z, "OBB");//OBB盒子
viewer->setRepresentationToWireframeForAllActors();//线框模式
viewer->resetCameraViewpoint();
//addLine画线
//Eigen::Vector3f p1 (min_point_OBB.x, min_point_OBB.y, min_point_OBB.z);
//Eigen::Vector3f p2 (min_point_OBB.x, min_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p3 (max_point_OBB.x, min_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p4 (max_point_OBB.x, min_point_OBB.y, min_point_OBB.z);
//Eigen::Vector3f p5 (min_point_OBB.x, max_point_OBB.y, min_point_OBB.z);
//Eigen::Vector3f p6 (min_point_OBB.x, max_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p7 (max_point_OBB.x, max_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p8 (max_point_OBB.x, max_point_OBB.y, min_point_OBB.z);
//p1 = rotational_matrix_OBB * p1 + position;
//p2 = rotational_matrix_OBB * p2 + position;
//p3 = rotational_matrix_OBB * p3 + position;
//p4 = rotational_matrix_OBB * p4 + position;
//p5 = rotational_matrix_OBB * p5 + position;
//p6 = rotational_matrix_OBB * p6 + position;
//p7 = rotational_matrix_OBB * p7 + position;
//p8 = rotational_matrix_OBB * p8 + position;
//pcl::PointXYZ pt1 (p1 (0), p1 (1), p1 (2));
//pcl::PointXYZ pt2 (p2 (0), p2 (1), p2 (2));
//pcl::PointXYZ pt3 (p3 (0), p3 (1), p3 (2));
//pcl::PointXYZ pt4 (p4 (0), p4 (1), p4 (2));
//pcl::PointXYZ pt5 (p5 (0), p5 (1), p5 (2));
//pcl::PointXYZ pt6 (p6 (0), p6 (1), p6 (2));
//pcl::PointXYZ pt7 (p7 (0), p7 (1), p7 (2));
//pcl::PointXYZ pt8 (p8 (0), p8 (1), p8 (2));
//viewer->addLine (pt1, pt2, 1.0, 0.0, 0.0, "1 edge");
//viewer->addLine (pt1, pt4, 1.0, 0.0, 0.0, "2 edge");
//viewer->addLine (pt1, pt5, 1.0, 0.0, 0.0, "3 edge");
//viewer->addLine (pt5, pt6, 1.0, 0.0, 0.0, "4 edge");
//viewer->addLine (pt5, pt8, 1.0, 0.0, 0.0, "5 edge");
//viewer->addLine (pt2, pt6, 1.0, 0.0, 0.0, "6 edge");
//viewer->addLine (pt6, pt7, 1.0, 0.0, 0.0, "7 edge");
//viewer->addLine (pt7, pt8, 1.0, 0.0, 0.0, "8 edge");
//viewer->addLine (pt2, pt3, 1.0, 0.0, 0.0, "9 edge");
//viewer->addLine (pt4, pt8, 1.0, 0.0, 0.0, "10 edge");
//viewer->addLine (pt3, pt4, 1.0, 0.0, 0.0, "11 edge");
//viewer->addLine (pt3, pt7, 1.0, 0.0, 0.0, "12 edge");
while(!viewer->wasStopped())
{
viewer->spinOnce (100);
boost::this_thread::sleep (boost::posix_time::microseconds (100000));
}
return (0);
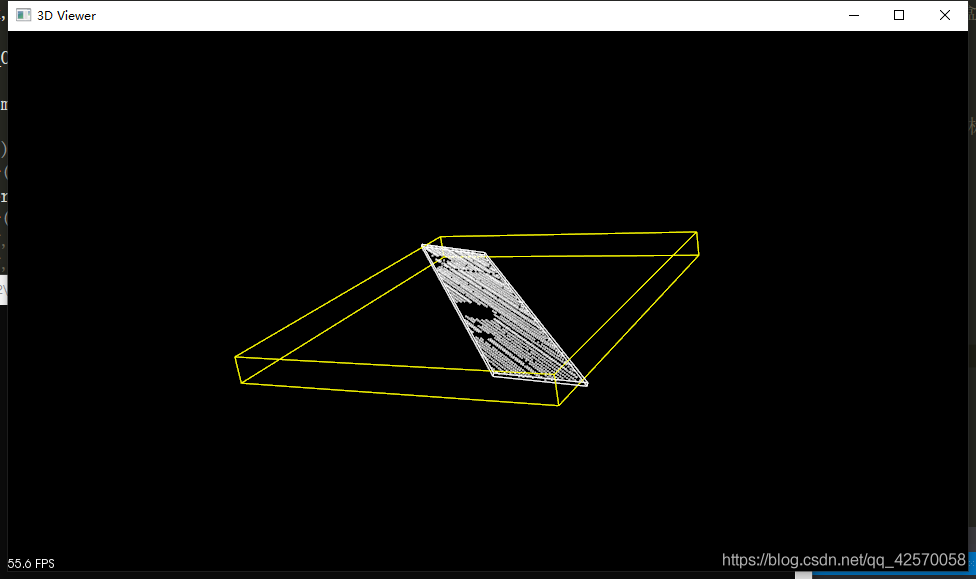
}运行效果:
版权声明:本文为qq_42570058原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。