
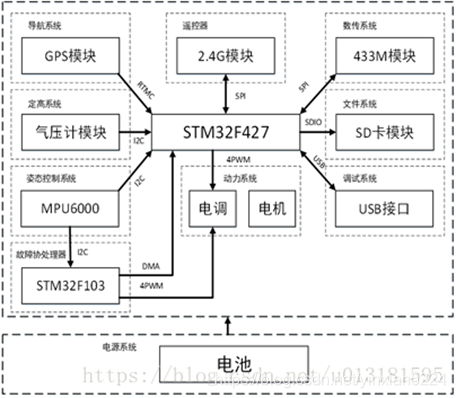
STM32F427芯片作为主控器承担着全部传感器的数据读写,姿态的结算及控制,以及其他信息的处理和控制。
对于其它外围系统以及和主控器的通信方式分别如下所示:动力系统由主控器的四路PWM控制,调试系统通过microUSB接口和主控器交互,文件系统通过SDIO协议和主控制器交互,遥控系统通过SPI协议和主控制器交互,GPS系统通过RTMC协议和主控器交互,定高及姿态控制系统都是通过I2C协议和主控器交互。这里比较故障协处理器比较有趣,当飞机的主控制器发生错误导致无法对电机进行控制时,可以由协控制器感知到,进而获得电机的控制权,将电机控制在安全的模式下,直到检测到主控器对电机的控制恢复正常。协控制器不定时的读取主控器的DMA计数寄存器,当这次计数寄存器的值和上去读取到的值一致时说明主控器没有对电机的PWM进行更新,主控制器失去了对电机的控制,这时协控制器得知主控制器异常,开始接管对电机的控制,直到DMA计数器更新,主控制器恢复对电机的控制。
具体传感器协议使用情况如上图所示。
版权声明:本文为yinxian5224原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。