系统Ubuntu 18.04
ROS版本: Melodic
1 创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_tf roscpp rospy tf turtlesim2创建Python文件
1 创建scripts文件夹和.py文件
touch turtle_tf_broadcaster.py
touch turtle_tf_listener.py
修改.py文件属性(允许作为执行文件)

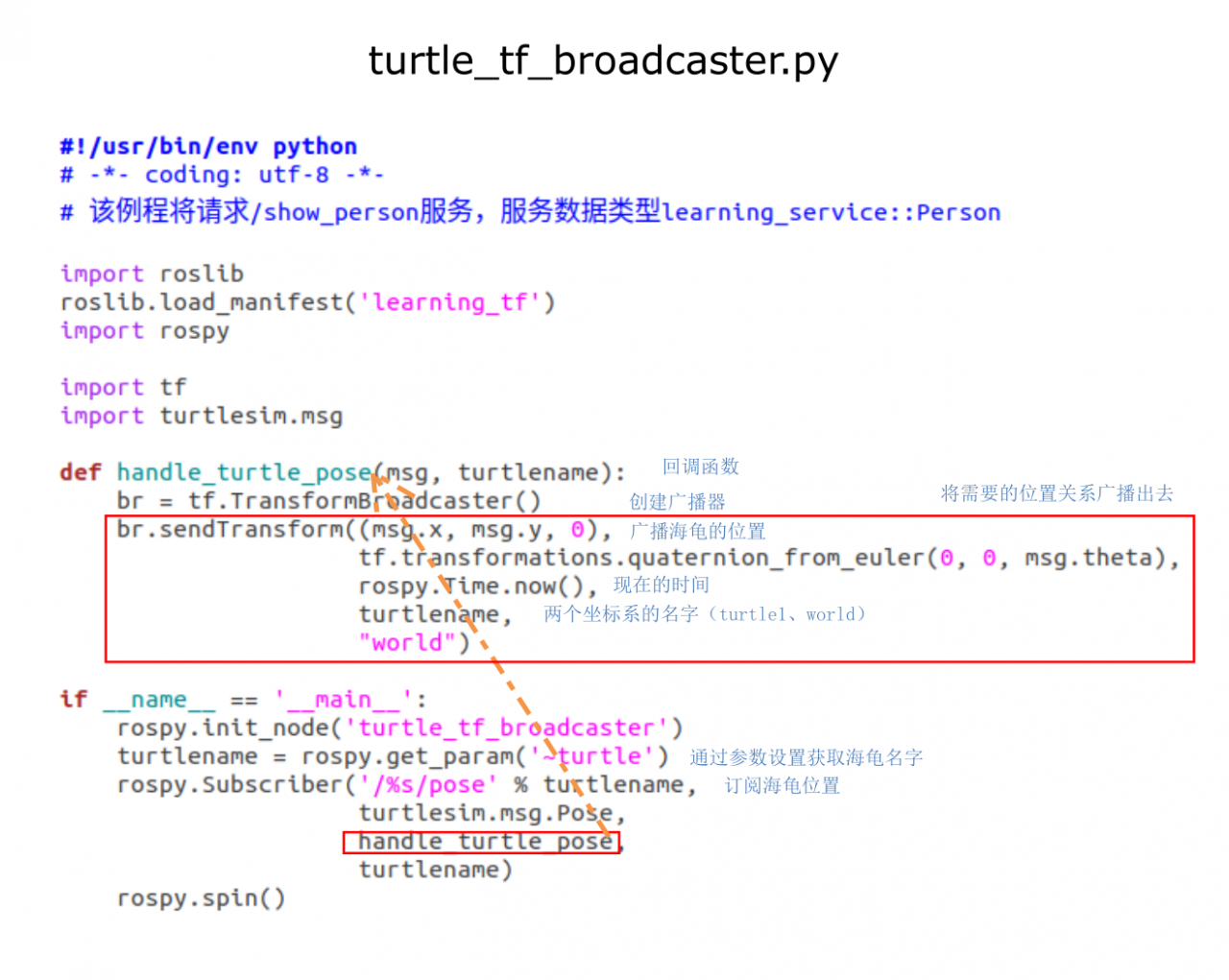
2 实现一个tf广播器(turtle_tf_broadcaster.py)
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### 广播器 ###
########################################################################
import roslib
roslib.load_manifest('learning_tf')
import rospy
import tf
import turtlesim.msg
def handle_turtle_pose(msg, turtlename):
br = tf.TransformBroadcaster()
br.sendTransform((msg.x, msg.y, 0),
tf.transformations.quaternion_from_euler(0, 0, msg.theta),
rospy.Time.now(),
turtlename,
"world")
if __name__ == '__main__':
rospy.init_node('turtle_tf_broadcaster')
#获取海龟的名字
turtlename = rospy.get_param('~turtle')
#订阅海龟的位置
rospy.Subscriber('/%s/pose' % turtlename,
turtlesim.msg.Pose,
handle_turtle_pose,
turtlename)
rospy.spin()
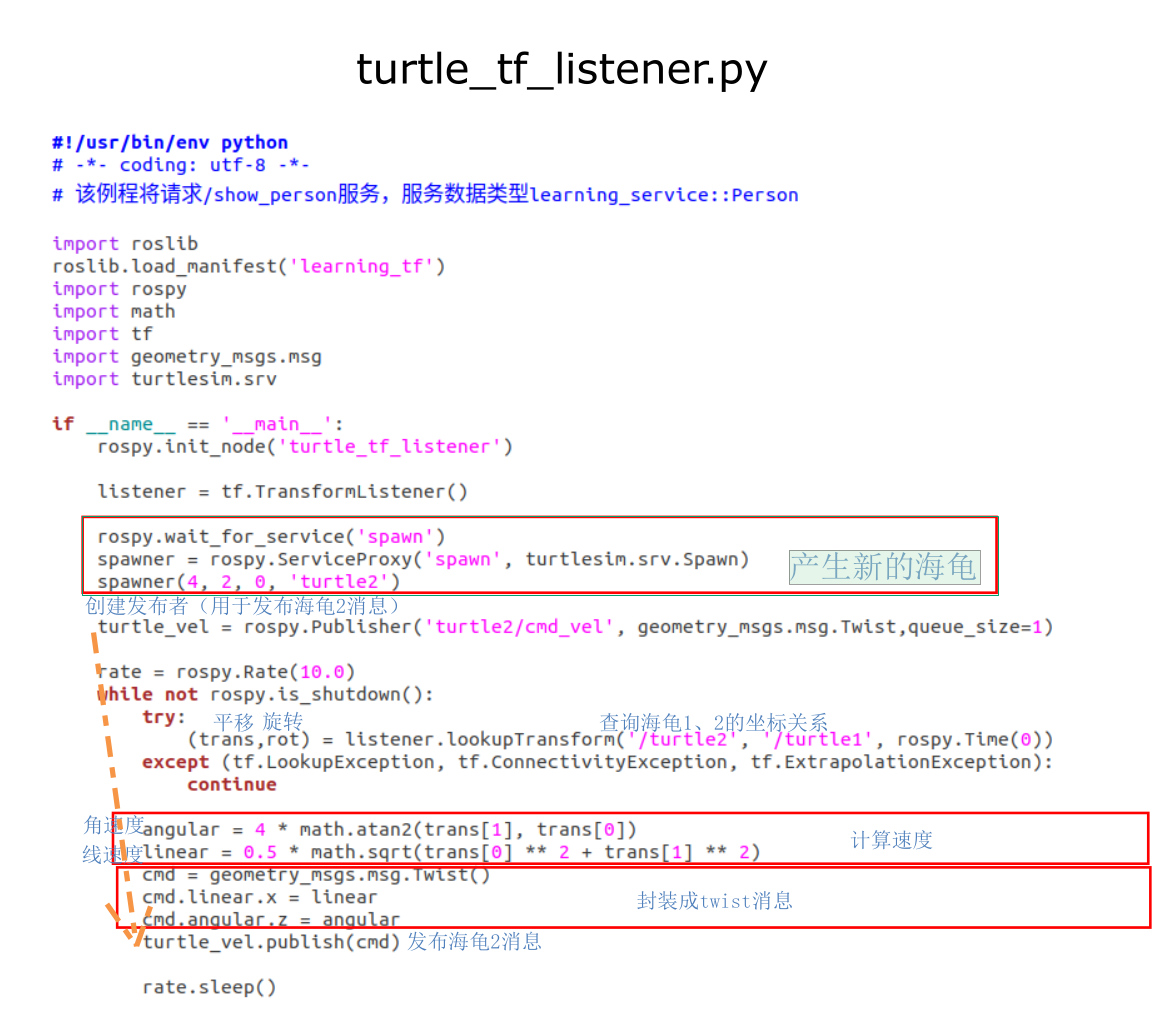
3 实现一个tf监听器(turtle_tf_listener.py)
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### tf监听器 ###
########################################################################
import roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srv
if __name__ == '__main__':
rospy.init_node('turtle_tf_listener')
listener = tf.TransformListener()
rospy.wait_for_service('spawn')
spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)
spawner(4, 2, 0, 'turtle2')
turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist,queue_size=1)
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
try:
(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
angular = 4 * math.atan2(trans[1], trans[0])
linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)
cmd = geometry_msgs.msg.Twist()
cmd.linear.x = linear
cmd.angular.z = angular
turtle_vel.publish(cmd)
rate.sleep()3.运行
使用python文件可以省略编译部分,直接启动。
启动ROS核心、海龟仿真器、键盘节点
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key启动代码文件
source devel/setup.bash
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
source devel/setup.bash
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
source devel/setup.bash
rosrun learning_tf turtle_tf_listener4 效果

查看节点控制图:
rqt_graph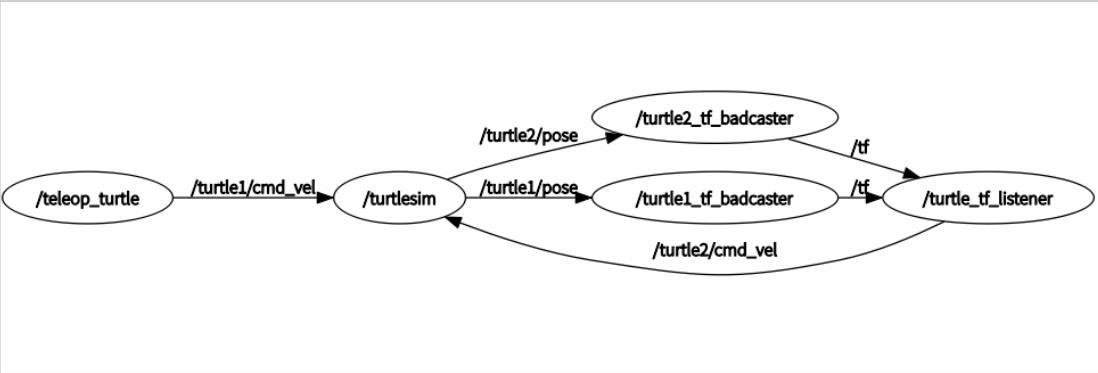
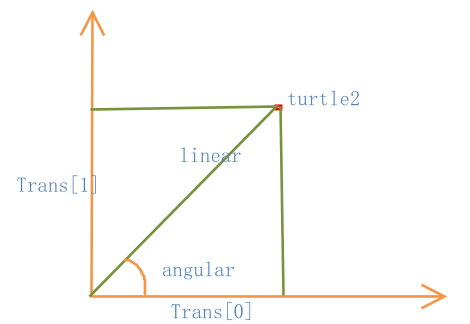
代码的部分解释:
在math库函数中,atan2(y,x)表示求y/x(弧度表示)的反正切值。则速度表示如下:
版权声明:本文为ftraa原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。