在无线电导航中,常用的坐标系有三种。
一 :三种坐标系
1 ECEF坐标系
也叫地心地固直角坐标系。其原点为地球的质心,x轴延伸通过本初子午线(0度经度)和赤道(0deglatitude)的交点。 z轴延伸通过的北极(与地球旋转轴重合)。 y轴完成右手坐标系,穿过赤道和90度经度。
2 WGS-84坐标系(LLA)
也就是也叫经纬高坐标系(经度(longitude),纬度(latitude)和高度(altitude)LLA坐标系)。,全球地理坐标系、大地坐标系。可以说是最为广泛应用的一个地球坐标系,它给出一点的大地纬度、大地经度和大地高程而更加直观地告诉我们该点在地球中的位置,故又被称作经纬高坐标系。WGS-84坐标系的X轴指向BIH(国际时间服务机构)1984.0定义的零子午面(Greenwich)和协议地球极(CTP)赤道的交点。Z轴指向CTP方向。Y轴与X、Z轴构成右手坐标系。
ECEF与WGS-84坐标系:将ECEF坐标系用在GPS中,就是WGS-84坐标系。
3 东北天坐标系(ENU)
ENU坐标系也叫站心坐标系,它是以用户所在位置P为坐标原点, X轴:指向东边, Y轴:指向北边 ,Z轴:指向天顶
ENU局部坐标系采用三维直角坐标系来描述地球表面,实际应用较为困难,因此一般使用简化后的二维投影坐标系来描述。
二: 坐标系之间的转换
- WGS-84坐标系的经纬高坐标系转换为ECEF空间直角坐标系XYZ
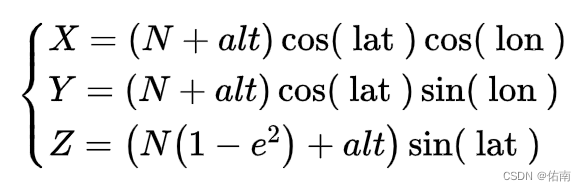
其中: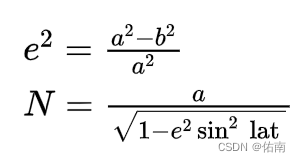
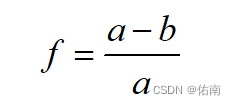
WGS-84坐标系下,基准椭球体的极扁率f
偏心率e与极扁率f的关系可以表示为
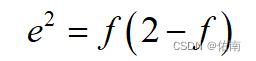
注:公式中的偏心率可以使用两种表达式求解都可以。
- ECEF xyz转经纬高
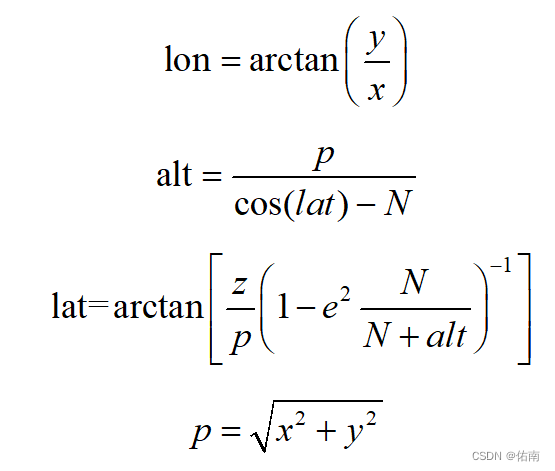
这里需要先设置一个假定lon,经过几次迭代之后收敛,然后获取最优。
- 经纬高转东北天坐标系
这个转换也是我写这篇文章的主要目的,在最近的编程中需要进行坐标系之间的转换。站心坐标系有其独一无二的优势,给与编程实现带来了无与伦比的好处。
在此我们需要注意,将经纬高转为东北天坐标系的时候,先将经纬高转换为xyz,转为东北天坐标系(ENU)。
相反,我们想要从东北天坐标系转为经纬高坐标系,也需要先转到xyz坐标系。
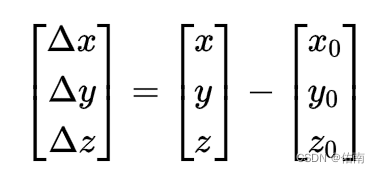
这里只介绍xyz转ENU坐标系
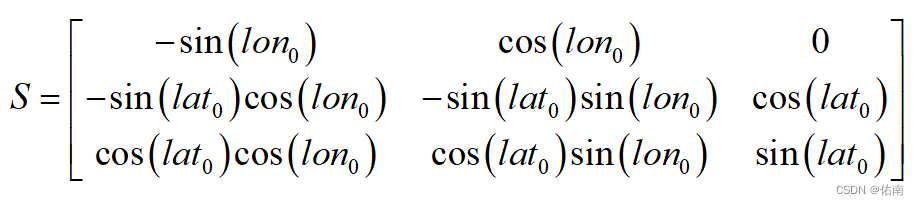
用户所在坐标原点𝑃0=(𝑥0,𝑦0,𝑧0),计算点𝑃=(𝑥,𝑦,𝑧)在以点𝑃0为坐标原点的ENU坐标系位置(e,n,u)这里需要用到LLA坐标系的数据,𝑃0的LLA坐标点为𝐿𝐿𝐴0=(𝑙𝑜𝑛0,𝑙𝑎𝑡0,𝑎𝑙𝑡0)

坐标旋转矩阵:
下面是代码下载链接,MATLAB版本的。
https://download.csdn.net/download/sj664163/86884756