Ubuntu16.04下ROS、usb_cam安装、rosdep更新错误
ros安装
1.添加源,设置秘钥
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
//设置秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
2.安装
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
这个过程有点慢
3.配置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
4.rosdep初始化,更新(这个方法可以避免rosdep init和update出错)
参考链接:https://zhuanlan.zhihu.com/p/398754989
rosdepc,c指的是China中国,主要用于和rosdep区分。rosdep官方最新版源码直接修改的,小鱼只动了名称和源地址,将其地址修改为国内gitee地址。
sudo apt-get install python3-pip
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
5. 安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
6.测试
打开一个新终端
roscore
打开一个新终端
rosrun turtlesim turtlesim_node
打开一个新终端
rosrun turtlesim turtle_teleop_key
此时在这个terminal内可以通过按键控制乌龟移动
打开一个新终端
rqt_graph
usb_cam安装
1.下载
cd catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
2.编译
cd catkin_ws
catkin_make
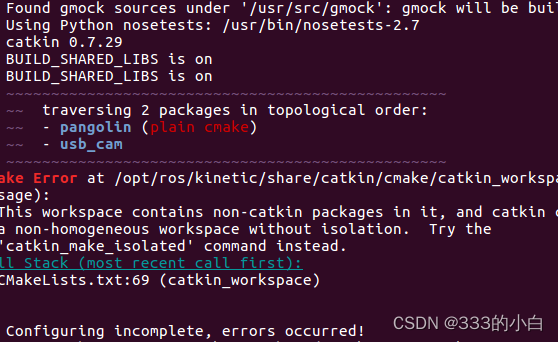
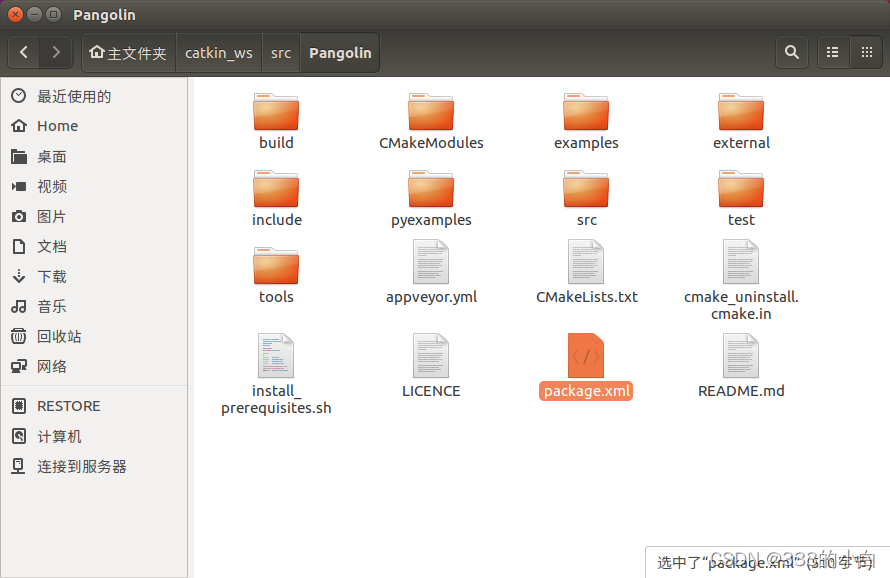
注:若是将Pangolin放在catkin_ws/src,会报错
解决方法删除Pangolin文件下的package.xml
source ./devel/setup.bash
cd src/usb_cam
mkdir build
cd build
cmake ..
make -j8
3.运行
代开新终端
roscore
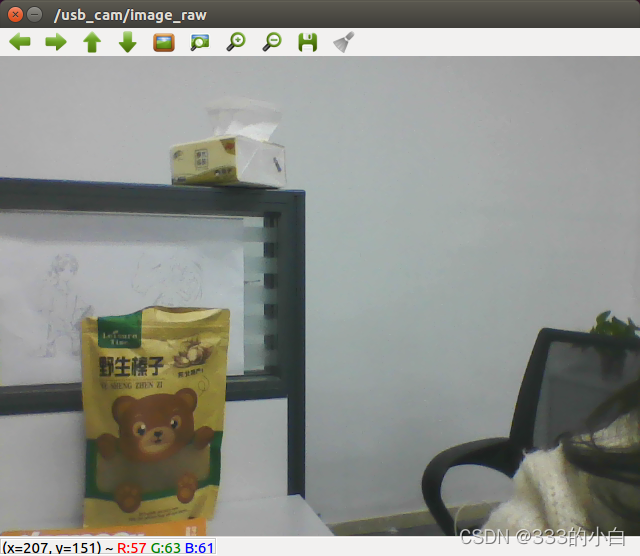
打开新终端运行usb_cam下的launch文件夹,运行相机节点
roslaunch usb_cam usb_cam-test.launch
最后发现报以下错误的原因是要将保证source ~/catkin_ws/devel/setup.bash这句始终在配置文件bashrc的最后一行,
![]()
若报错如下:

执行以下代码
source ~/catkin_ws/devel/setup.bash
roslaunch usb_cam usb_cam-test.launch
。。。。。。
版权声明:本文为creative1原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。