传统的图方法都是直推式(transductive)的,学习到的是结构固定的图模型,一旦有新的节点加入,便需要重新训练整个图网络,泛化性不强。GraphSAGE是归纳式(inductive)的,它学习一种映射:通过采样和聚合邻居节点信息来生成当前节点的表征。GraphSAGE可扩展性更强,对于节点分类和链接预测问题的表现也比较突出。
模型结构
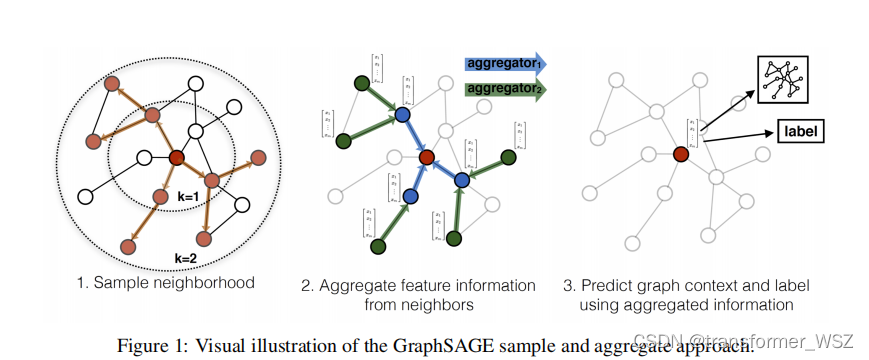
- 采样一跳和二跳的邻居节点
- 聚合邻居节点的特征信息
- 预测图上下文和当前节点标签信息
算法流程
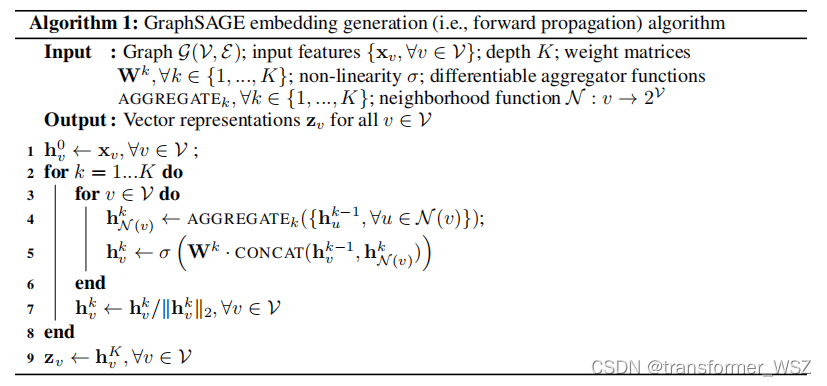
整体上还是非常通俗易懂的。
损失函数
- 有监督:跟常规的分类任务一样,使用交叉熵损失函数
- 无监督:根据节点间共现关系来定义损失函数:
J
G
(
z
u
)
=
−
log
(
σ
(
z
u
⊤
z
v
)
)
−
Q
⋅
E
v
n
∼
P
n
(
v
)
log
(
σ
(
−
z
u
⊤
z
v
n
)
)
J_{\mathcal{G}}\left(\mathbf{z}_u\right)=-\log \left(\sigma\left(\mathbf{z}_u^{\top} \mathbf{z}_v\right)\right)-Q \cdot \mathbb{E}_{v_n \sim P_n(v)} \log \left(\sigma\left(-\mathbf{z}_u^{\top} \mathbf{z}_{v_n}\right)\right)
J
G
(
z
u
)
=
−
lo
g
(
σ
(
z
u
⊤
z
v
)
)
−
Q
⋅
E
v
n
∼
P
n
(
v
)
lo
g
(
σ
(
−
z
u
⊤
z
v
n
)
)
-
uu
u
表示当前节点,而
vv
v
是跟它在一条随机路径上共现的节点,两者相似,内积很大,则
−log
(
σ
(
z
u
⊤
z
v
)
)
-\log \left(\sigma\left(\mathbf{z}_u^{\top} \mathbf{z}_v\right)\right)
−
lo
g
(
σ
(
z
u
⊤
z
v
)
)
接近0 -
Pn
(
v
)
P_n(v)
P
n
(
v
)
表示负采样分布,
QQ
Q
为负样本个数,
uu
u
与
vn
v_n
v
n
负内积很大,则
−Q
⋅
E
v
n
∼
P
n
(
v
)
log
(
σ
(
−
z
u
⊤
z
v
n
)
)
-Q \cdot \mathbb{E}_{v_n \sim P_n(v)} \log \left(\sigma\left(-\mathbf{z}_u^{\top} \mathbf{z}_{v_n}\right)\right)
−
Q
⋅
E
v
n
∼
P
n
(
v
)
lo
g
(
σ
(
−
z
u
⊤
z
v
n
)
)
接近 0
实验结果
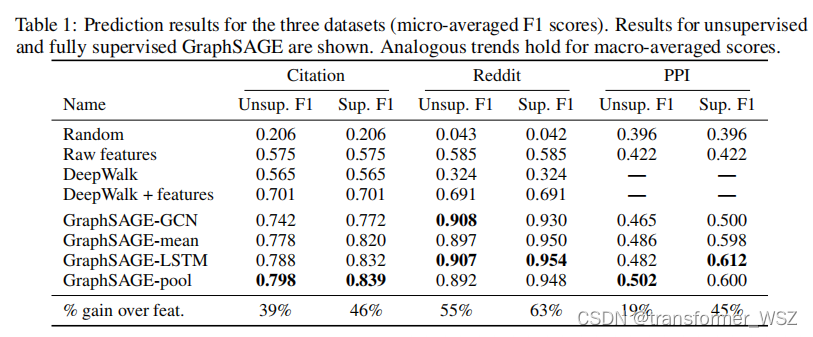
在三个数据集上大幅领先baseline。
参考