今天要聊的论文是斯坦福大学Charles等人在CVPR2017上发表的论文,提出了一种直接处理点云的深度学习网络——PointNet。这篇论文具有里程碑意义,标志着点云处理进入一个新的阶段。为什么会给这么高的评价呢?
因为在PointNet之前,点云没办法直接处理,因为点云是三维的、无序的,别说深度神经网络了,就是普通算法很多都不能奏效。于是人们想出来各种办法,比如把点云拍扁成图片(MVCNN),比如把点云划分成体素(类似游戏“我的世界”里的场景),再比如把点云划分成节点然后按顺序拉直(O-CNN)等等。总之,点云先要被处理成“非点云”。
这些想法怎么样呢?其实也挺不错的,也能取得不错的结果。比如MVCNN的有些指标就不输PointNet。
这时候我们就会觉得,冥冥中一定会有一种网络出现,摆脱上面这些操作。于是,PointNet出现了,从此点云处理领域分成“前PointNet时代”和“后PointNet时代”。接着,各种直接处理点云的网络也纷纷出现,如PointCNN、SO-Net,效果也是越来越好。
下面进入正题,看看PointNet有哪些创新点。
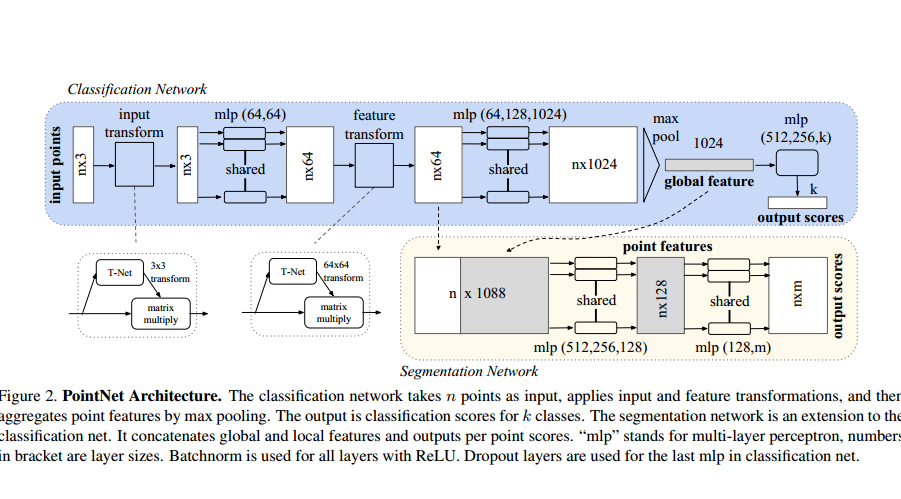
1、针对点云无序性——采用Maxpooling作为对称函数。最大池化操作就是对所有成员进行比较,把最大的留下来,其余舍弃掉,所以,不管顺序如何变化,最大值是不会改变的。
对称函数是什么意思?例如加法就是对称函数,1+2+3+
版权声明:本文为qq_33278989原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。