1.正文
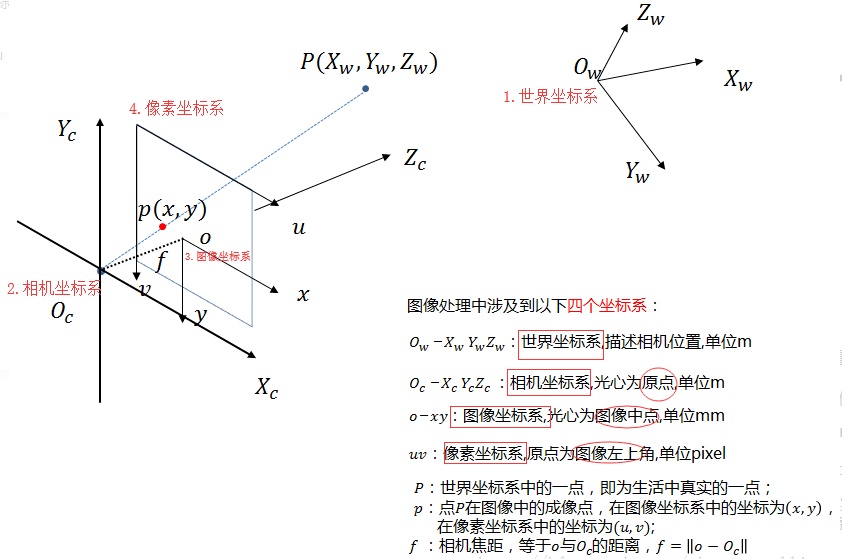
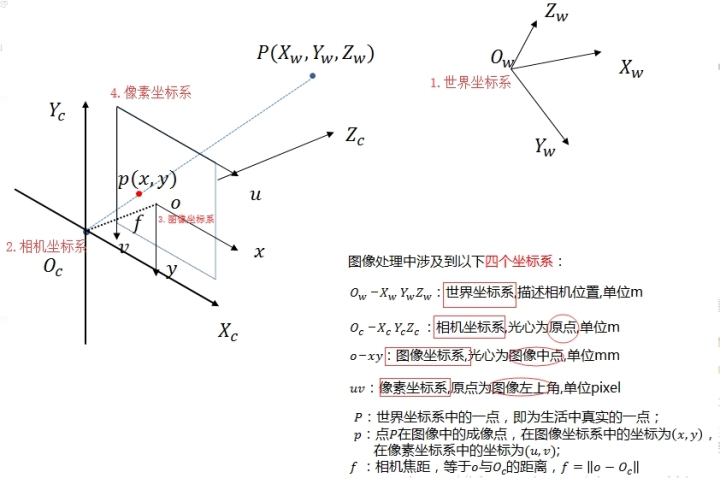
四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。
世界坐标系:机器人或相机运动过程中,肯定需要知道它的位置,因此需要设定世界坐标系,认定固定不动,作为 参考坐标系,描述世界中的任何一点P(Xw,Yw,Zw)。
相机坐标系:相机或机器人运动的一个坐标系,通过世界坐标系的变换(旋转R,平移T)计算得到。因此主要是将 世界坐标系描述的点坐标P(Xw,Yw,Zw)转换成相机坐标系下描述P(Xc,Yc,Zc),方便计算得到在成像坐标系的坐 标。
图像(成像)坐标系:描述点在图像坐标系的成像点位置。
像素坐标:在相机中得到的是一个像素,因此主要将图像坐标系的点转换成像素坐标系下。
1.1.将世界坐标系转换得到相机坐标系

旋转 平移
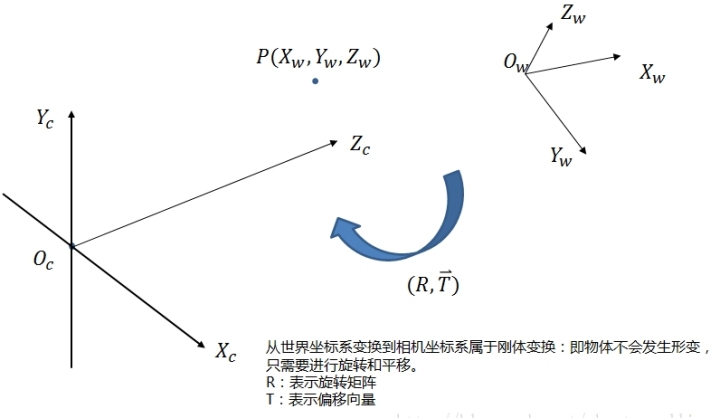
旋转矩阵:R,三维旋转矩阵构成特殊正交群SO(3)。知道它的物理意义就是表示旋转即可。
变换矩阵:T,旋转+平移.变换矩阵构成特殊欧式群SE(3)。
旋转向量(轴角):一个旋转轴+一个旋转角,外积表示旋转,
欧拉角:绕z轴旋转,得到偏航角yaw,绕旋转之后Y轴旋转,得到俯仰角pitch,绕旋转之后X轴旋转,得到滚转角 roll。
四元数,q=a+bi+cj+dk,类比虚数,同样用来表示旋转。
a.欧式变换:有6个自由度,在变换前后,保持不变的性质是长度、夹角、体积。
b.相似变换:有7个自由度,在变换前后,保持不变的性质是体