5. 阈值分隔
5.1 全局阈值分隔
全局阈值分割指的是将灰度值大于 thresh(阈值)的像素设为白色,小于或者等于 thresh 的像素设为黑色;或者反过来,将大于 thresh 的像素设为黑色,小于或者等于 thresh 的像素设为白色,两者的区别只是呈现形式不同。
OpenCV提供的函数如下:
double cv::threshold(cv::InputArray src, cv::OutputArray dst, double thresh, double maxval, int type)
src:单通道矩阵,数据类型为 CV_8U 或者 CV_32F。
type = THRESH_OTSU 或 THRESH_TRIANGLE 时,src 只支持 uchar 类型。
dst:输出矩阵,即阈值分割后的矩阵
thresh:阈值
maxVal:在图像二值化显示时,一般设置为 255
type:阈值分隔类型
使用方法如下:
//输入矩阵为 5 行 3列
Mat src = (Mat_<uchar>(5, 3) << 123, 234, 68, 33, 51, 17,
48, 98, 234, 129, 89, 27, 45, 167, 134);
//第一种情况:手动设置阈值
double the = 150;
Mat dst;
threshold(src, dst, the, 255, THRESH_BINARY);
//第二种情况:Otsu 算法
double otsuThe=0;
Mat dst_Otsu;
otsuThe = threshold(src, dst_Otsu, otsuThe, 255, THRESH_OTSU + THRESH_BINARY);
//第三种情况:TRIANGLE 算法
double triThe=0;
Mat dst_tri;
triThe = threshold(src, dst_tri, 0, 255, THRESH_TRIANGLE + THRESH_BINARY);
return 0;
5.1.1 利用熵算法计算阈值
信息熵(entropy)的概念来源于信息论,假设信源符号 ? 有 ? 种取值,记为
u
1
,
u
2
,
⋯
,
u
N
u_1,u_2,\cdots,u_N
u
1
,
u
2
,
⋯
,
u
N
且每一种信源符号出现的概率,记为
p
1
,
p
2
,
⋯
,
p
N
p_1,p_2,\cdots,p_N
p
1
,
p
2
,
⋯
,
p
N
那么该信源符号的信息熵,记为
entropy
(
u
)
=
−
∑
i
=
1
N
p
i
log
p
i
\text{entropy}(u)=-\sum\limits_{i=1}^{N}{
{
{p}_{i}}\log {
{p}_{i}}}
entropy
(
u
)
=
−
i
=
1
∑
N
p
i
lo
g
p
i
图像也可以看作一种信源,假设输入图像为
I
\mathbf{I}
I
,
normHis
t
I
\text{normHis}{
{\text{t}}_{\mathbf{I}}}
normHis
t
I
代表**
归一化
**的图像灰度直方图,那么对于 8 位图可以看成由 256 个灰度符号,且每一个符号出现的概率为
normHis
t
I
(
k
)
\text{normHis}{
{\text{t}}_{\mathbf{I}}}(k)
normHis
t
I
(
k
)
组成的信源,其中 0 ⩽ ? ⩽ 255。
利用熵计算阈值的步骤如下:
第一步:计算
I
\mathbf{I}
I
的累加概率直方图,又称零阶累积矩,记为
cumuHist
(
k
)
=
∑
i
=
0
k
normHis
t
I
(
k
)
,
k
∈
[
0
,
255
]
\text{cumuHist}(k)=\sum\limits_{i=0}^{k}{\text{normHis}{
{\text{t}}_{\mathbf{I}}}(k)},k\in [0,255]
cumuHist
(
k
)
=
i
=
0
∑
k
normHis
t
I
(
k
)
,
k
∈
[
0
,
2
5
5
]
第二步:计算各个灰度级的熵,记为
entropy
(
t
)
=
−
∑
k
=
0
t
normHis
t
I
(
k
)
log
(
normHis
t
I
(
k
)
)
,
t
∈
[
0
,
255
]
\text{entropy}(t)\text{=}-\sum\limits_{k=0}^{t}{\text{normHis}{
{\text{t}}_{\mathbf{I}}}(k)\log (\text{normHis}{
{\text{t}}_{\mathbf{I}}}(k))},t\in [0,255]
entropy
(
t
)
=
−
k
=
0
∑
t
normHis
t
I
(
k
)
lo
g
(
normHis
t
I
(
k
)
)
,
t
∈
[
0
,
2
5
5
]
第三步:计算使
f
(
t
)
=
f
1
(
t
)
+
f
2
(
t
)
f(t)={
{f}_{1}}(t)+{
{f}_{2}}(t)
f
(
t
)
=
f
1
(
t
)
+
f
2
(
t
)
最大化的
t
t
t
值,该值即为得到的阈值,其中
KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ & {
{f}_{1}}(…
5.2 局部阈值分隔(自适应阈值分隔)
背景:光照不均的情况下,全局阈值分隔的效果不是很理想。在这种情况下,使用局部阈值(自适应阈值)进行分隔可以产生好的效果。
局部阈值分隔不再像全局阈值一样,对整个矩阵只有一个阈值,而是针对输入矩阵的每一个位置的值都有相对应的阈值,这些阈值构成了
和输入矩阵同等尺寸
的矩阵
t
h
r
e
s
h
\mathbf{thresh}
t
h
r
e
s
h
。
局部阈值分隔的核心是计算阈值矩阵,方法如下:
第一步:对图像进行平滑处理,平滑结果记为
f
smooth
(
I
)
{
{f}_{\text{smooth}}}(\mathbf{I})
f
smooth
(
I
)
,其中平滑可以是均值平滑、高斯平滑、中值平滑,但是平滑算子的宽和高必须都是奇数。
第二步:自适应阈值矩阵
T
h
r
e
s
h
=
(
1
−
ratio
)
⋅
f
smooth
(
I
)
\mathbf{Thresh}=(1-\text{ratio})\cdot {
{f}_{\text{smooth}}}(\mathbf{I})
T
h
r
e
s
h
=
(
1
−
ratio
)
⋅
f
smooth
(
I
)
,一般令
ratio
=
0.15
\text{ratio}=0.15
ratio
=
0
.
1
5
。
第三步:利用局部阈值分隔的规则进行阈值分隔。
在自适应阈值处理中,平滑算子的尺寸决定了分割出来的物体的尺寸,如果滤波器尺寸太小,那么估计出的局部阈值将不理想。凭经验,
平滑算子的宽度必须大于被识别物体的宽度
,平滑算子的尺寸越大,平滑后的结果越能更好地作为每个像素的阈值的参考,当然也不能无限大。
OpenCV提供的自适应阈值函数如下:
void cv::adaptiveThreshold(cv::InputArray src, cv::OutputArray dst, double maxValue, int adaptiveMethod, int thresholdType, int blockSize, double C)
src:单通道矩阵,数据类型为 CV_8U
dst:输出矩阵,即阈值分割后的矩阵
maxValue:与函数 Threshold 类似,一般取 255
adaptiveMethod:
ADAPTIVE_THRESH_MEAN_C:采用均值平滑
ADAPTIVE_THRESH_GAUSSIAN_C:采用高斯平滑
thresholdType:THRESH_BINARY、THRESH_BINARY_INV
blockSize:平滑算子的尺寸,且为奇数
C:比例系数。这个参数实际上是一个偏移值调整量,用均值和高斯计算阈值后,再减或加这个值就是最终阈值。
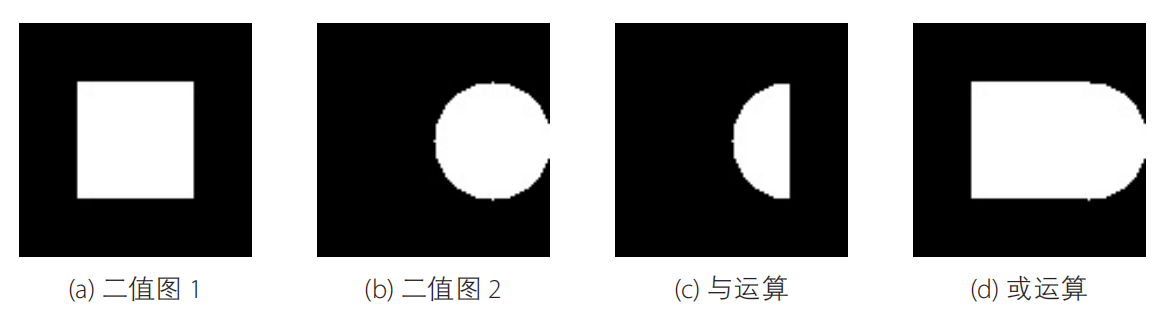
5.3 二值图的逻辑运算
“与”运算
void cv::bitwise_and(cv::InputArray src1, cv::InputArray src2, cv::OutputArray dst, cv::InputArray mask = noArray())
“或”运算
void cv::bitwise_or(cv::InputArray src1, cv::InputArray src2, cv::OutputArray dst, cv::InputArray mask = noArray())
效果如下: