最近公司业务需求,今年又要开始研究室内自主巡检无人机,无人机作为现在机器人技术应用较为广泛的产品之一,相信很多小伙伴们或多或少都知道了像大疆、易航这些牛逼的国货之光了,不过除了这些,或许还有很多你可能不知道的无人机秘密。
这是笔者下了100多篇国内外论文、文献,精心整理出来的关于室内无人机的综述、技术现状等等,分享给大家,希望能帮助到喜欢无人机行业、想深入研究无人机的小伙伴们。
综述
无人机应用
1、商业小型消费级无人机
电子消费品市场可以说是无人机应用最广泛的领域之一,市场上有很多其它做消费级无人机的公司哈,因为不是我研究的重点,所以就简单收集了几个带摄像头的消费无人机代表性产品,分享给大家,感兴趣的小伙伴们可以自己再百度搜下。

2、室内安防防控
无人机应用在室内安防防控,这个功能估计小伙伴们可能第一次听吧。但国外确实已经有人在研究了。想要了解的小伙伴们,千万不要错过了。
视频链接:
室内安防巡检无人机

3、室外自主巡检无人机
国内像大疆经纬系列无人机,已经广泛应用于国内政府事业单位、农业植保行业了,有兴趣的可以直接上其官网了解哈。
接下来讲下我了解到的国外的一些无人机。下面这个是以色列的一个公司的主打产品,主要应用于一些矿业、能源、重工业领域的多任务一体无人机,有自己的充电仓,可以进行巡回检查、工作进度监控等特定任务。
自充电室外巡检无人机:Sparrow Autonomous Drone

4、室内管道检查、故障检修、救援无人机
这是一个瑞士公司的产品,主要应用于室内高风险和狭窄空间进行无人机检查和探索。

这是国外一种
双螺旋桨无人机ASIO
,专门从事受限工业资产的检查。该飞机基于自主研发的由保护罩包围推进专利系统,在飞行时间和冗余度方面都有很大的创新。

当然无人机的应用还远不止于此,也还有很多国内外优秀的公司正在努力地推动无人机的发展,篇幅有限,这里就不展开讲了。不过说不定过个几十年,就会出现天上飞的载人汽车,到时地面上的汽车说不定就都淘汰了,所以喜欢无人机行业的小伙伴们,要坚持下去,我们一起加油。


无人机定位技术
接下来给大家分享下目前主流的
四种室内外无人机定位技术
方法。
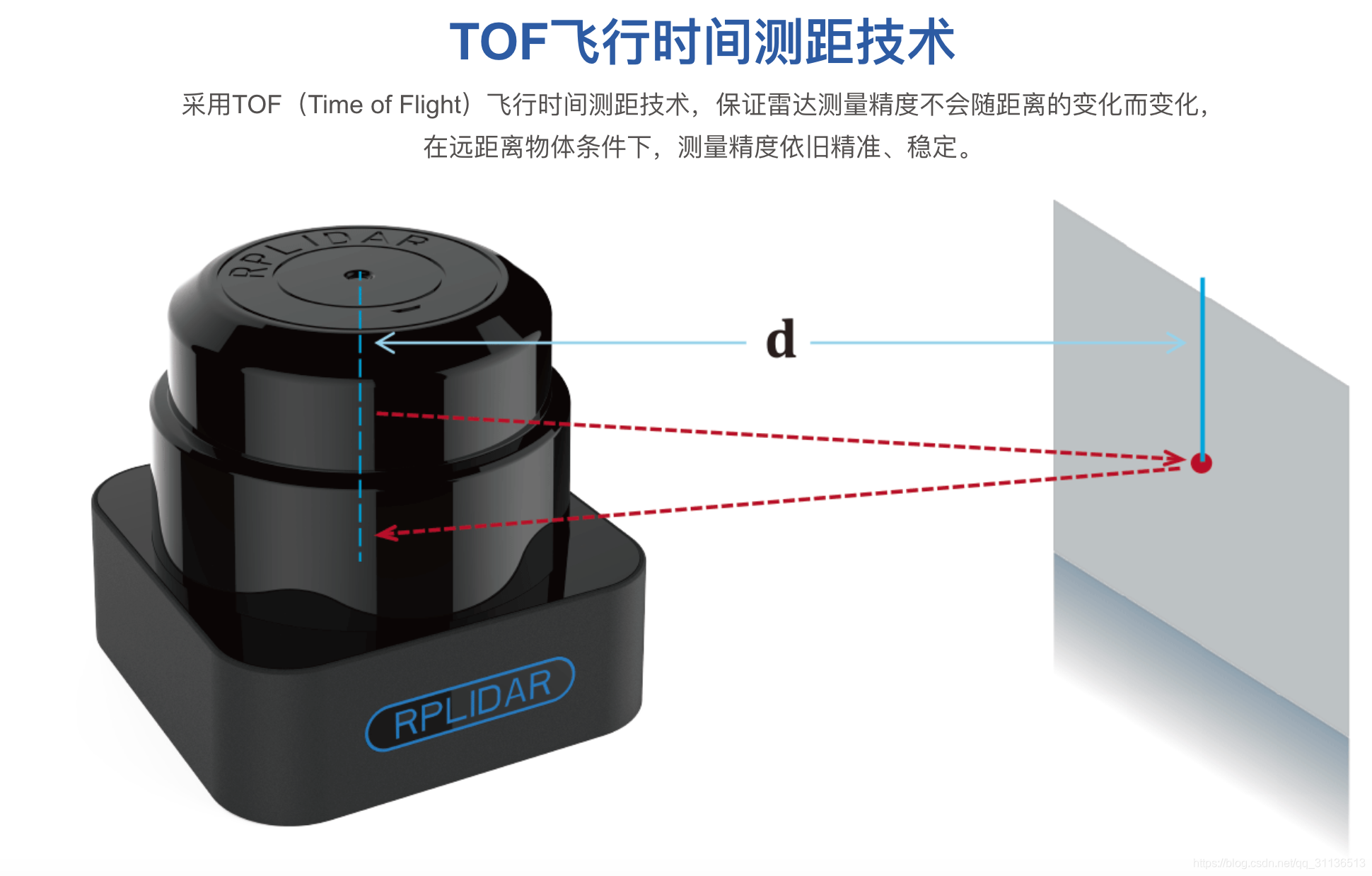
基于激光雷达/测距仪LiDAR的定位方式
激光雷达LiDAR(LightLaser Detection and Ranging),是激光探测及测距系统的简称。
百度百科:
激光雷达LiDAR
- 优点:激光测距仪具有定位精度高、抗干扰能力强、实时性强等优点;
- 缺点:1)成本较高,平均都1000元以上起;2)激光射到环境中的玻璃或表面比较光滑的物体时,由于镜面折损,激光会接收不了损失的光束,这样会导致信息缺失从而影响定位精度。
基于惯性导航系统(Inertial Navigation System,INS)的定位方法
惯性导航系统(INS,以下简称惯导)是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。

百度百科:
惯性导航系统
- 优点:通过陀螺仪可直接获取速度和位置,多运用于移动机器人定 位领域
- 缺点:随着时间的推移会造成误差的累积,影响定位精度
基于全球定位系统(Global Positioning System,GPS)的定位方式
全球定位系统(Global Positioning System,GPS)是一种以人造地球卫星为基础的高精度无线电导航的定位系统,它在全球任何地方以及近地空间都能够提供准确的地理位置、车行速度及精确的时间信息。

百度百科:
全球定位系统
- 优点:在室外比较空矿的环境下能达到的定位精度很高,为 10cm 左右。
- 缺点:当在室内环境中使用 GPS定位系统时,由于捕获的无线信号强度不足,无法满足室内定位的需求。
基于视觉系统Visual System的定位方式

主要是通过摄像头获取环境图像,再经过处理分析得出目标物体实际位置的过程。采用视觉定位方法构建无人机室内定位与导航系统已成为无人机领域的研发热点。
- 优点:相比激光测距仪、INS 和GPS全球定位系统等如今众多的定位方式,视觉定位不但解决了室内定位面临的无线屏蔽、干扰等不利因素的影响,而且更好地解决了诸如激光测距定位价格昂贵、INS定位误差大等一系列定位问题。
- 缺点:面临着光照条件、高动态环境、快速运动、剧烈旋转和低纹 理环境等重要障碍
今天先更新到这里,下一篇,会继续更新关于国内外微小型飞行器视觉避障研究近况以及如何技术实现的干货,喜欢的小伙伴们不要错过,可以一键三连哈。你的支持,就是我持续更新的重要力量。谢谢!
参考论文:
基于多传感器融合的室内环境探测飞行器设计-西南科技大学-张樱凡
基于visual_SLAM算法的四旋翼无人机室内定位研究-哈尔滨工业大学-徐铎
小型无人机双目视觉定位系统实现与探索-江苏大学-陈晔
写这篇博客的过程中,参考了我在知网上下载的一些论文(有些论文没有记录下来了,如果引用了关于您论文的资料,请告知我,及时附上您的论文链接)。
本文只供大家学习相关知识使用,不以任何商业盈利为目的,转载或分享请注明相关来源。如涉及到相关侵权,请联系我删除。
欢迎志同道合者互相交流学习,可以加我微信号:Zhihua_Steven,或者扫以下二维码添加我的微信。
