1、源码
#include <iostream>
#include <Eigen/Eigen>
#include <stdlib.h>
#include <Eigen/Geometry>
#include <Eigen/Core>
#include <vector>
#include <math.h>
using namespace std;
using namespace Eigen;
Eigen::Quaterniond euler2Quaternion(const double roll, const double pitch, const double yaw)
{
Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitZ());
Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitY());
Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitX());
Eigen::Quaterniond q = rollAngle * yawAngle * pitchAngle;
cout << "Euler2Quaternion result is:" <<endl;
cout << "x = " << q.x() <<endl;
cout << "y = " << q.y() <<endl;
cout << "z = " << q.z() <<endl;
cout << "w = " << q.w() <<endl<<endl;
return q;
}
Eigen::Vector3d Quaterniond2Euler(const double x,const double y,const double z,const double w)
{
Eigen::Quaterniond q;
q.x() = x;
q.y() = y;
q.z() = z;
q.w() = w;
Eigen::Vector3d euler = q.toRotationMatrix().eulerAngles(2, 1, 0);
cout << "Quaterniond2Euler result is:" <<endl;
cout << "x = "<< euler[2] << endl ;
cout << "y = "<< euler[1] << endl ;
cout << "z = "<< euler[0] << endl << endl;
}
Eigen::Matrix3d Quaternion2RotationMatrix(const double x,const double y,const double z,const double w)
{
Eigen::Quaterniond q;
q.x() = x;
q.y() = y;
q.z() = z;
q.w() = w;
Eigen::Matrix3d R = q.normalized().toRotationMatrix();
cout << "Quaternion2RotationMatrix result is:" <<endl;
cout << "R = " << endl << R << endl<< endl;
return R;
}
Eigen::Quaterniond rotationMatrix2Quaterniond(Eigen::Matrix3d R)
{
Eigen::Quaterniond q = Eigen::Quaterniond(R);
q.normalize();
cout << "RotationMatrix2Quaterniond result is:" <<endl;
cout << "x = " << q.x() <<endl;
cout << "y = " << q.y() <<endl;
cout << "z = " << q.z() <<endl;
cout << "w = " << q.w() <<endl<<endl;
return q;
}
Eigen::Matrix3d euler2RotationMatrix(const double roll, const double pitch, const double yaw)
{
Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitZ());
Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitY());
Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitX());
Eigen::Quaterniond q = rollAngle * yawAngle * pitchAngle;
Eigen::Matrix3d R = q.matrix();
cout << "Euler2RotationMatrix result is:" <<endl;
cout << "R = " << endl << R << endl<<endl;
return R;
}
Eigen::Vector3d RotationMatrix2euler(Eigen::Matrix3d R)
{
Eigen::Matrix3d m;
m = R;
Eigen::Vector3d euler = m.eulerAngles(0, 1, 2);
cout << "RotationMatrix2euler result is:" << endl;
cout << "x = "<< euler[2] << endl ;
cout << "y = "<< euler[1] << endl ;
cout << "z = "<< euler[0] << endl << endl;
return euler;
}
int main(int argc, char **argv)
{
//this is euler2Quaternion transform function,please input your euler angle//
euler2Quaternion(0,0,0);
//this is Quaternion2Euler transform function,please input your euler angle//
Quaterniond2Euler(0,0,0,1);
//this is Quaternion2RotationMatrix transform function,please input your Quaternion parameter//
Quaternion2RotationMatrix(0,0,0,1);
//this is rotationMatrix2Euler transform function,please input your RotationMatrix parameter like following//
Eigen::Vector3d x_axiz,y_axiz,z_axiz;
x_axiz << 1,0,0;
y_axiz << 0,1,0;
z_axiz << 0,0,1;
Eigen::Matrix3d R;
R << x_axiz,y_axiz,z_axiz;
rotationMatrix2Quaterniond(R);
//this is euler2RotationMatrix transform function,please input your euler angle for the function parameter//
euler2RotationMatrix(0,0,0);
//this is RotationMatrix2euler transform function,please input your euler angle for the function parameter//
RotationMatrix2euler(R);
cout << "All transform is done!" << endl;
}
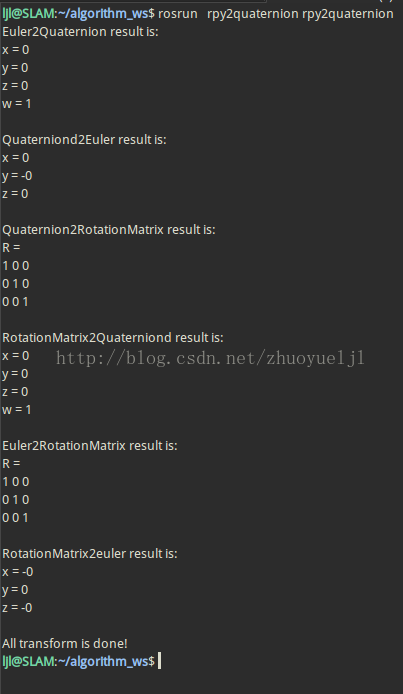
2、测试结果
版权声明:本文为zhuoyueljl原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。