ROS全覆盖规划算法 Coverage Path Planning 采坑
1.参考
ROS全覆盖规划算法逻辑整理笔记
2.源码下载:
算法源码
3.ros 编译:
mkdir -p ./ipa-rmb/src
cd ./ipa-rmb/src/
#把下载源码解压放在./ipa-rmb/src/
cd ./ipa-rmb
#想全部模块编译执行
catkin_make
#中间会有缺少ros 模块包根据编译出错安装包
sudo apt-get install ros-版本-报错后面提示缺少包
#只编译 ipa_room_exploration模块,就按照下面命令编译
catkin_make -DCATKIN_WHITELIST_PACKAGES="ipa_building_msgs;ipa_building_navigation;ipa_room_exploration"
3.中间遇到
libconcorde_tsp_solver
包错误问题,ubuntu6.04 ros kinetic版本上
有,20.04 ros noetic没有这个包, 18.04版本没有测试,
sudo apt-get install ros-kinetic-libconcorde-tsp-solver
#这个问题就能过了 20.04把下载的包拷贝过去是否可以没有试验过。
cmake 指定 c++ 11
在src目录打开CmakeLists.txt 文件
在set(…)下面添加如下
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 11)
endif()
4.后面安装一大堆ros包.中间我的遇到一个链接问题;
libproj.so链接问题
sudo ln -s /usr/lib/arm-linux-gnueabihf/libproj.so.9 /usr/lib/arm-linux-gnueabihf/libproj.so
#根据自己实际目录情况改/arm-linux-gnueabihf/
5:还有一个大坑:包
coinutils
问题,cmake里面不要去屏蔽掉相应包,不然编译完成后面会出问题。
参考
sudo apt-get install coinor-*
coinutils这个
COIN-OR的开源模块简绍
后面基本上能编译通过了,不行先把三个包编译通过,看到点希望,在编译其他的
编译完成在ros工作空间开两个终端:
#第一个终端
cd ipa-rmb//
#快捷键Ctrl+Alt+T
source ./devel/setup.bash
rosrun ipa_room_exploration room_exploration_server
#Ctrl+Alt+T
#第二个终端
source ./devel/setup.bash
rosrun ipa_room_exploration room_exploration_client
- 等待 sleep …
-
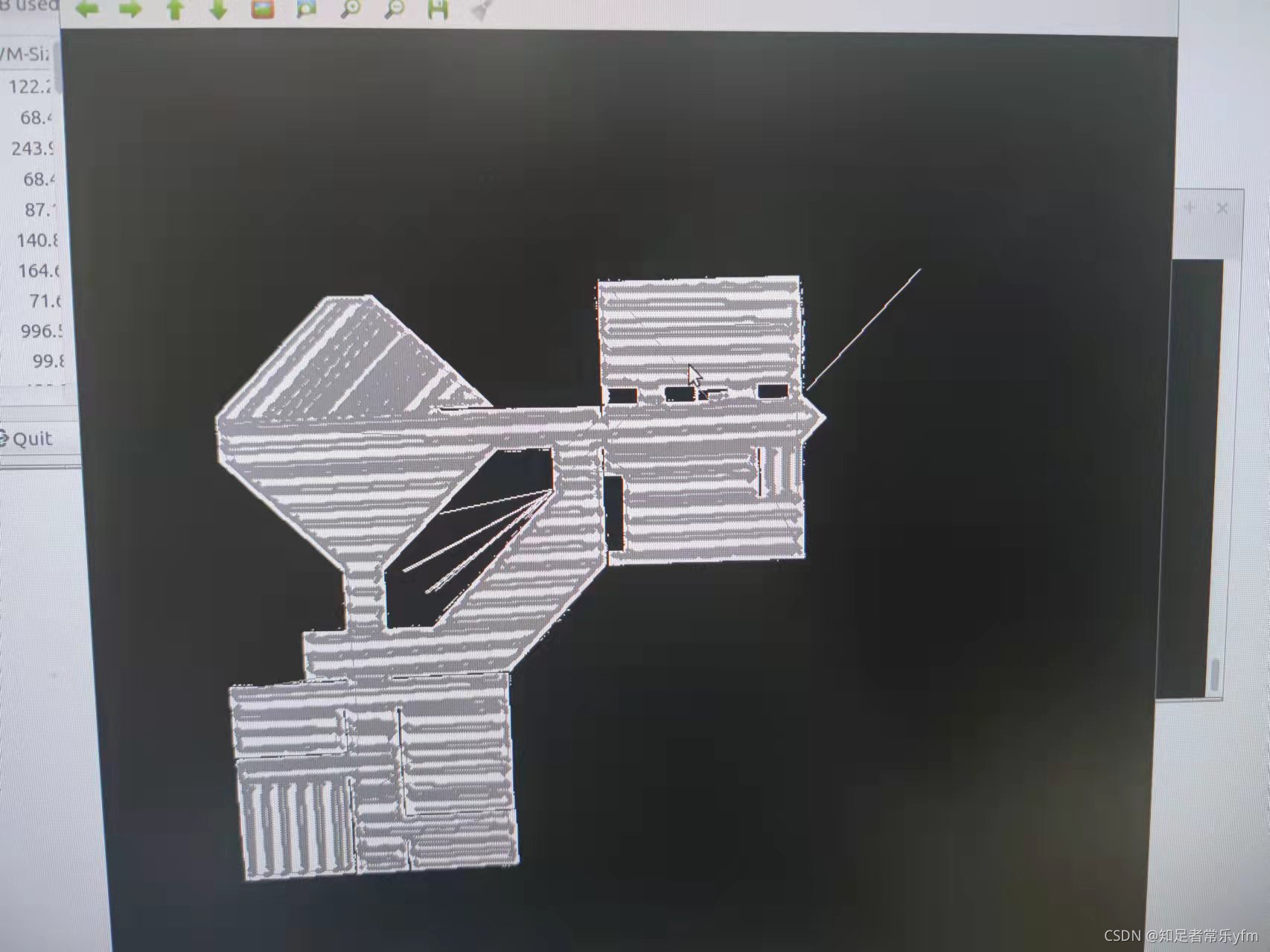
出现demo图片
版权声明:本文为weixin_42179076原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。