三维几何平移与三维坐标轴旋转
三维集合变换的方法是在二维方法的基础上扩充了z坐标而得到。多数情况下,该扩充比较直接,但有一些情况,比如旋转,该扩充就不那么明显。
一个三维位置在齐次坐标中表示为4元列向量。因此,每一次几何变换操作表示为一个从左边去乘坐标向量的4×4矩阵。
1. 三维平移
其矩阵变换形式为:
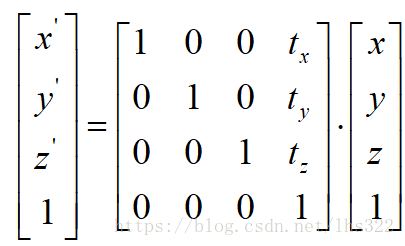
类似二维坐标变化的实现,我们可以构造一个平移矩阵,如果不懂,请转到
矩阵表示和齐次坐标
:
void Matrix4x4SetIdentity(Matrix4x4 matIdent4x4)
{
//生成一个单位矩阵
GLint row, col;
for (row = 0; row < 4;++row)
for (col = 0; col < 4;++col)
{
matIdent3x3[row][col] = (row==col);
}
}
void translate3D(GLfloat tx, GLfloat ty,GLfloat tz)
{
/*通过偏移量tx,ty产生平移矩阵matTransl之后,再通过矩阵的乘法,实现对象的平移*/
Matrix3x3 matTransl;//平移矩阵
Matrix3x3SetIdentity(matTransl);
matTransl[0][3] = tx;
matTransl[1][3] = ty;
matTransl[2][3] = tz;
/*矩阵乘法,平移*/
matrix3x3Premultiply(matTransl,matComposite);
}
1. 三维旋转
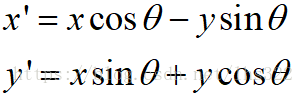
1.1 三维坐标轴旋转
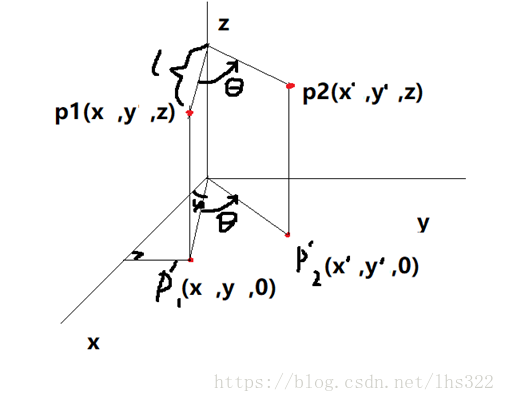
上图为绕z轴的坐标旋转,坐标旋转后x,y轴的坐标位置推导如下:
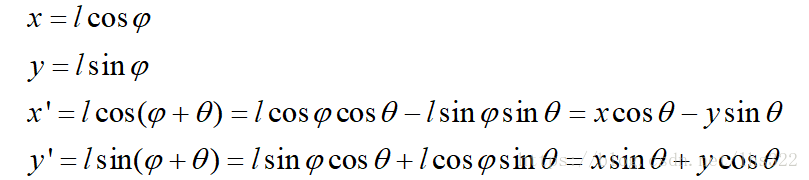
Z=Z’
矩阵形式:
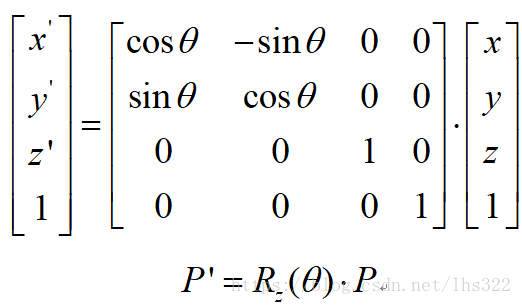
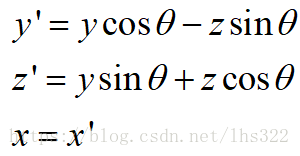
绕另外两个坐标轴的旋转变换公式,可以由
将x、y、z循环替换而得到:
循环替换顺序为:x->y->z->x
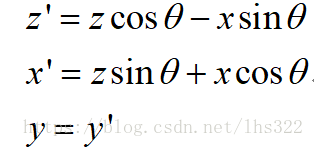
因此,为了得到x轴旋转变换,我们用y替代x,z替代y:
为了得到x轴旋转变换,我们用z替代y,x替代z
版权声明:本文为lhs322原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。