Dymola2018安装程序链接:https://pan.baidu.com/s/11cOTNqg-OhhHGOjX65Kllg
提取码:ol8p
安装了2018的破解版,奈何该软件过于高深,网络上找不到中文教程。准备强行按着官方文档一步一步学习。写文档也是一种整理和跟大家一起交流吧。接下来主要是入门,试着仿真一个工业机器人。
第一步:打开demo。
File > Demos >Robot.

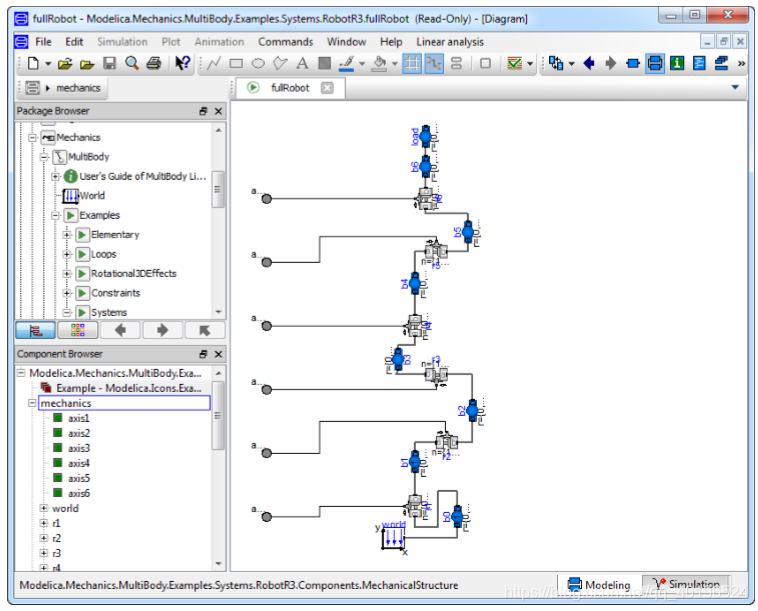
之后就可以看到这个界面啦

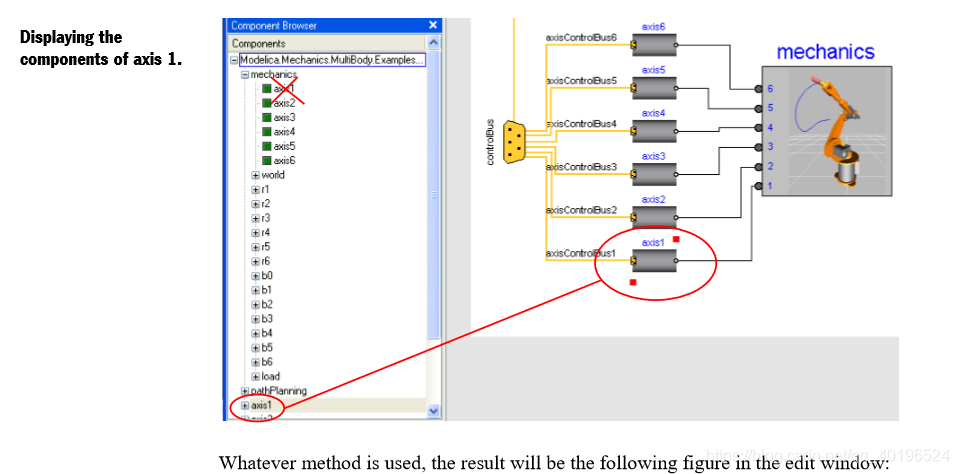
左上方子窗口中的包浏览器显示包层次结构,现在打开它,选择并突出显示机器人模型。编辑窗口中的模型图(右侧的子窗口)显示模型的顶级结构。模型图有一个机器人模型的图标,其中有关节的连接驱动线。通过路径规划模块计算到驱动线的参考角度,该模块在给定约束下给出最快的运动学运动。编辑窗口默认显示模型图(“图层”),但是用户可以选择要显示的其他信息(其他图层),例如,文档或Modelica文本。有关详细信息,请参阅“开发模型”一章。左下方子窗口中的组件浏览器还在树形结构视图中显示机器人实验的组件。要检查机器人模型,请在编辑窗口中选择图标(出现红色手柄,见下文),然后右键单击(按鼠标右侧的按钮)。弹出一个菜单,其中包含可以对所选对象进行的一系列操作(上下文菜单)。从上下文菜单中,选择“显示组件”。

只需将光标放在“mechanics”上,然后右键单击以获取“mechanics”的上下文菜单。组件浏览器提供组件结构的树表示。显示图层和组件浏览器的编辑窗口将同步,以提供一致的视图。在编辑窗口中选择组件时,它也会在组件浏览器中突出显示,反之亦然。编辑窗口的图层提供了一个组件的组件结构,而组件浏览器提供了更全局的视图;有助于避免在分层组件结构中丢失。编辑窗口现在显示由连接的关节和质量组成的机械结构。打开组件浏览器以显示力学模型组件的内部。
例如,双击编辑窗口底部的r1。 这是一个轮回的联合。 出现该组件的参数对话框。 也可以从右键菜单访问参数对话框。 双击左键可从右键菜单中选择第一个选项。
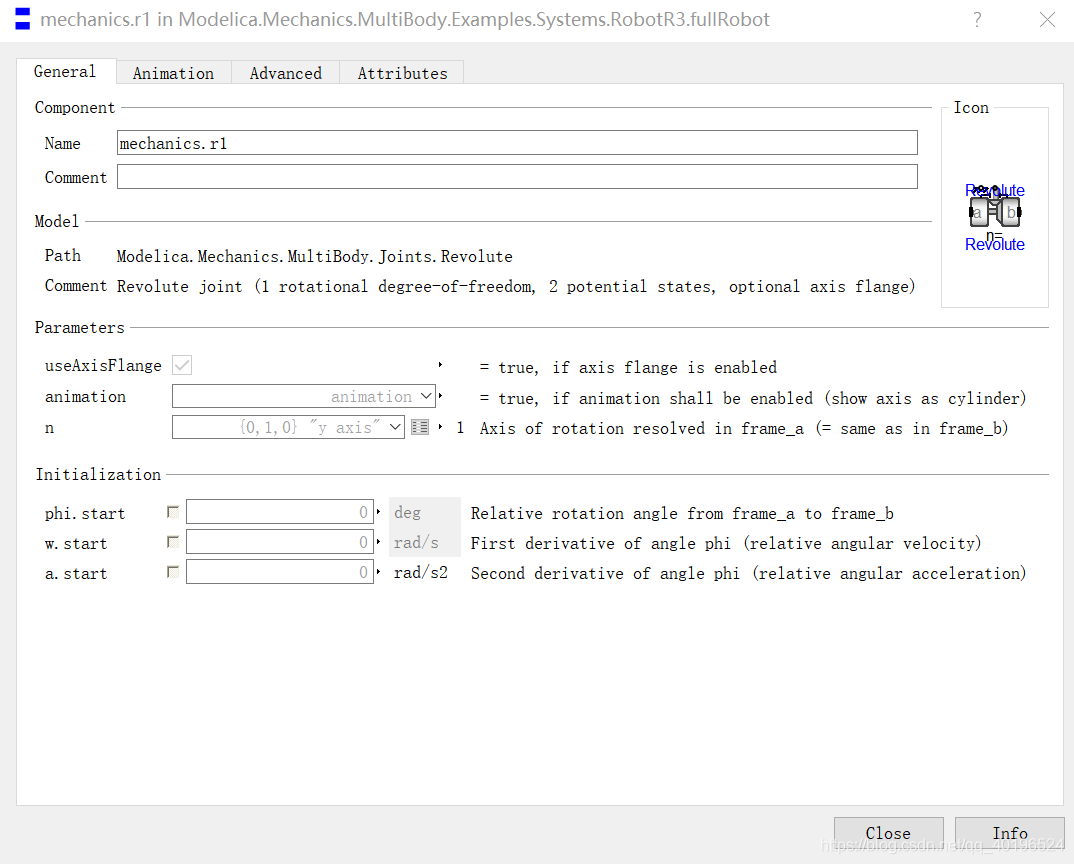
参数对话框允许用户检查实际参数值。在演示中,参数值被写保护以避免演示示例的无意更改 – 然后对话框只有一个关闭按钮(和一个信息按钮)。当参数值可以更改时,有一个OK按钮和一个Cancel按钮可供选择。值变暗以指示它们不是在顶级模型中给出,而是在组件层次结构中的某处。参数对话框可能有多个选项卡。此对话框包含选项卡:常规,动画,高级和添加修改器。在选项卡中,参数可以进一步构造成组,如图所示。模型开发人员可以轻松自定义参数对话框。 (有关自定义的更多信息,请参见“开发模型”一章的“高级模型编辑”一节,“参数,变量和常量”小节)。可以包括图形说明以显示参数的含义。如果准备好,可以在对话框中选择显示单位。具有替代品的单位用白色背景标记(这里phi.start和w.start具有可选择的显示单位)。将光标放在这样的单元上,会显示一个按钮。
到这里我还是比较懵逼的,整个界面都点不动,英文文档接下来都进行设置了,于是我仔细读了读上面这段话的第二句,发现原来需要重新保存一个文件,点file>save as就好了。
可选择的显示单元。


每个参数字段旁边都是一个三角形,这为您提供了一组用于编辑参数的选项。 编辑提供矩阵编辑器/函数调用编辑器; 编辑文本提供更大的输入字段等。例如,对于第一个参数useAxisFlange,可以使用命令编辑文本输入表达式(为了启用轴法兰,该命令应该为true)。 如果输入了这样的表达式,则复选框将显示为

。
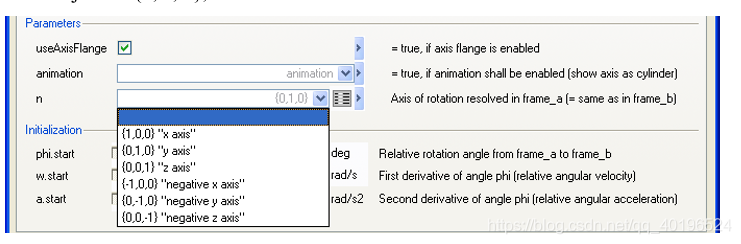
某些参数有一个选项列表,您可以在其中选择值而不是编写它们。 一个例子是参数n,它定义了旋转轴。 该旋转关节的值是{0,1,0},即旋转轴是垂直的。
要了解有关该组件的更多信息,请选择信息。 打开信息浏览器以显示旋转关节的文档。 文档中的链接可以轻松导航到例如 包含旋转关节的包装的描述。 现在请关闭浏览器并在参数对话框中按关闭以保留它。 (如果要在不通过参数对话框的情况下查看文档,请右键单击图中的组件并选择“信息”。)现在让我们检查传动系模型。 有几种可能的方法来显示它。 按“返回”按钮(带有粗体左箭头的工具栏按钮)一次以转到机器人模型,然后将光标放在其中一个轴图标上并单击鼠标右键。 请注意,robot.mechanics还有组件axis1,…,axis6,但这些只是连接器。 您必须检查例如robot.axis1(参见下图)。
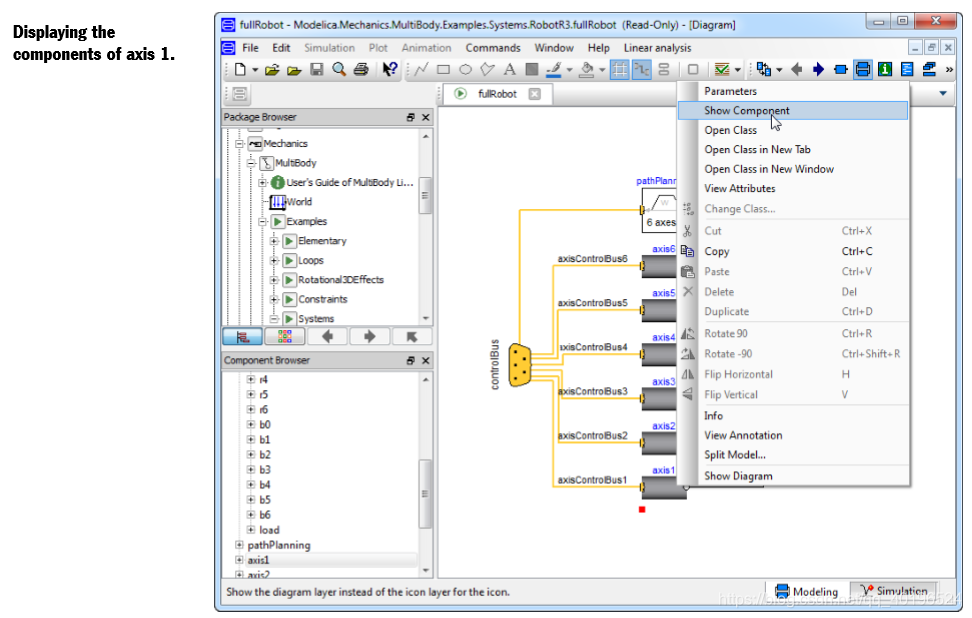
另一种方便的方法是使用组件浏览器。 将光标放在浏览器中所需组件的顶部,然后右键单击以获取上下文菜单。 选择Show Component,如下图所示。 (在这种情况下,还必须注意不要选择模块机制的任何轴。组件浏览器已在图中放大以说明这一点。)由于Show Component是第一个菜单选项,双击将产生相同的结果。 请记住,双击编辑窗口中的组件会弹出参数对话框(比较上图和下图中的两个菜单!)。
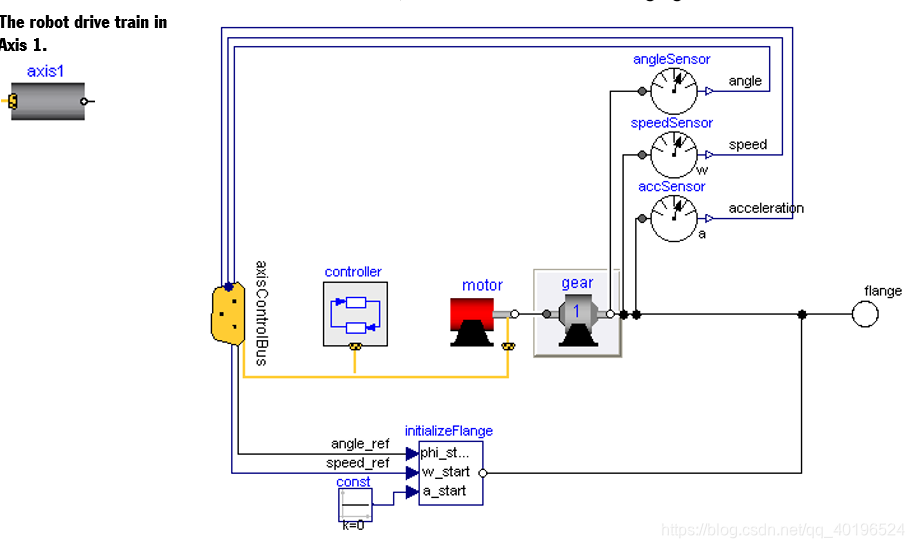
传动系包括控制器。 数据总线用于将测量和参考信号发送到控制器,并控制从控制器到执行器的信号。 一个轴的总线有以下信号:
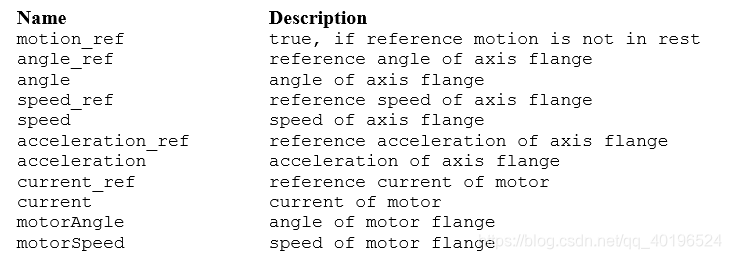
来自路径规划模块的总线被构建为具有用于轴的总线的6个元件的阵列。 通过选择控制器并显示其组件来显示下图。
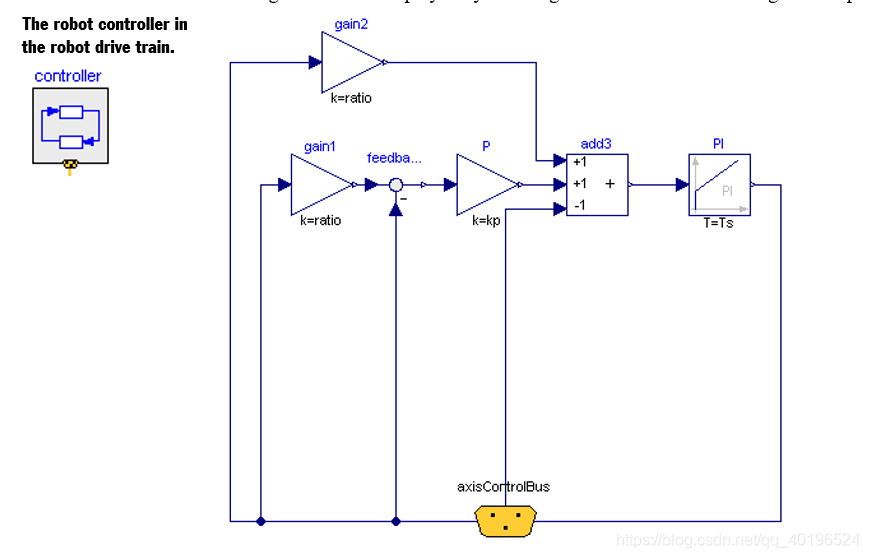
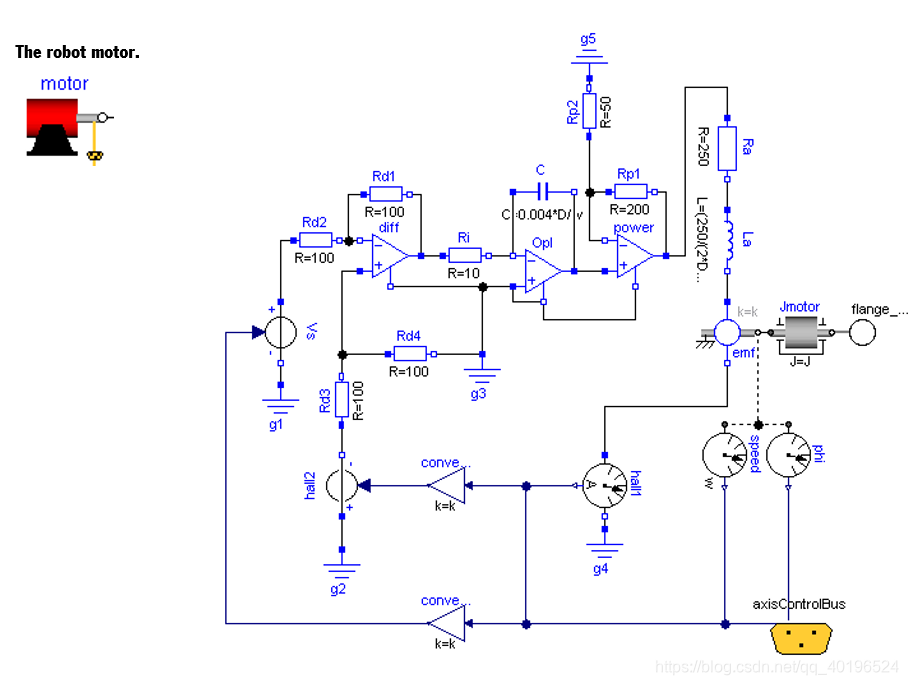
轴的控制器从路径规划模块获取角位置和速度的参考以及它们的实际值的测量。 控制器输出电动机电流的参考值,驱动变速箱。 电机模型由电动力,三个运算放大器,电阻器,电感器和反馈回路传感器组成。
以与其他组件类似的方式查看组件齿轮。 它显示了齿轮箱和轴承的摩擦模型以及轴的弹性。
前面都是讲解,后面开始仿真实操了。
让我们模拟机器人模型。 要进入模拟模式,请单击主窗口右下角的“simulink”选项卡。 请注意,选择模拟模式与模拟机器人不同; 但是它提供了这样做的可能性 – 在这种模式下可以使用所需的菜单。
Simulation菜单包含设置和运行模拟的命令。 还提供快捷按钮。 但是,该演示还准备了一个模拟模型的命令脚本。 选择“命令”>“模拟”执行脚本。 请使用该命令。

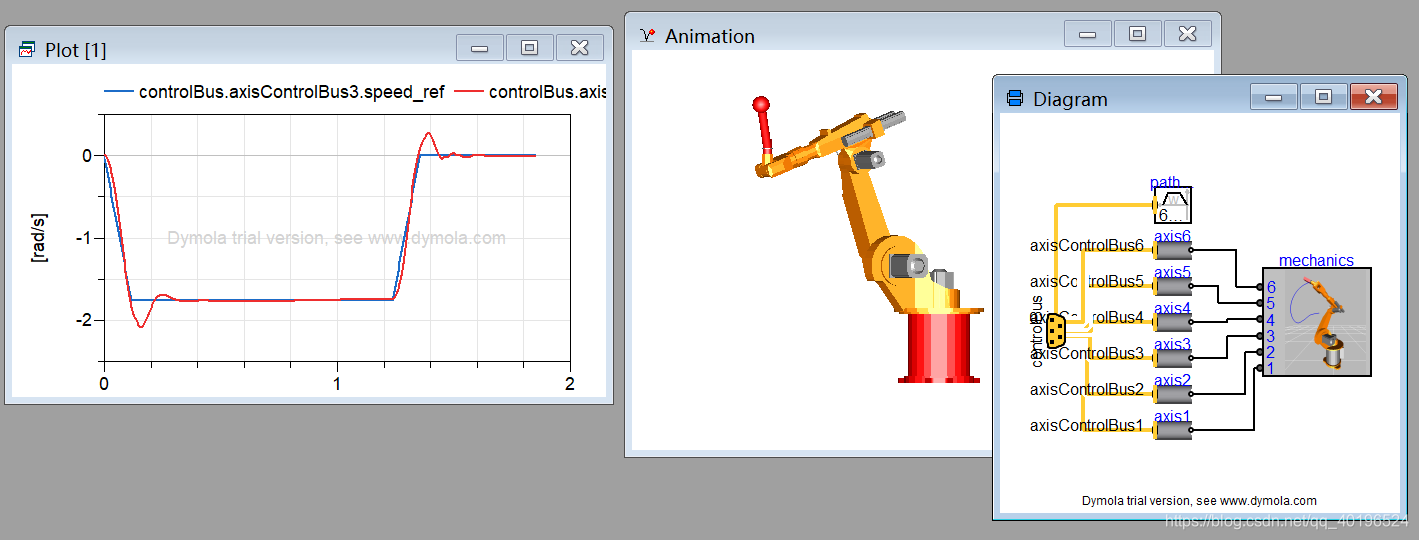
现在可以自动翻译和模拟模型。 该脚本还包含一些绘图窗口和动画窗口的设置。 放大Dymola主窗口后,它将看起来如下:

万万没想到竟然是这样的结局,不过不慌,可以看看错误原因嘛,显示我没有安装编译器。大家可以上他给的网址去看编译器的配置,我是Windows,然后选择了Visual C++ 2015 Express,官网下载的,由于怎么都捣鼓不出来,我把dymola卸载了,重装了一次
。。。。。。。。卡在这装了一晚上还是失败了。
最后的解决方法在CSDN上下载了2010版本,链接:https://pan.baidu.com/s/1cjhJahMFTkHocrxF9HLRGg
提取码:7jxx
复制这段内容后打开百度网盘手机App,操作更方便哦。
配置环境的时候会发现2010只能用于32位,32位就32位把,反正先得让马跑起来。(下载的dymola同时安装了32,64位,打开32的就好拉)
安好后在此处配置编译器
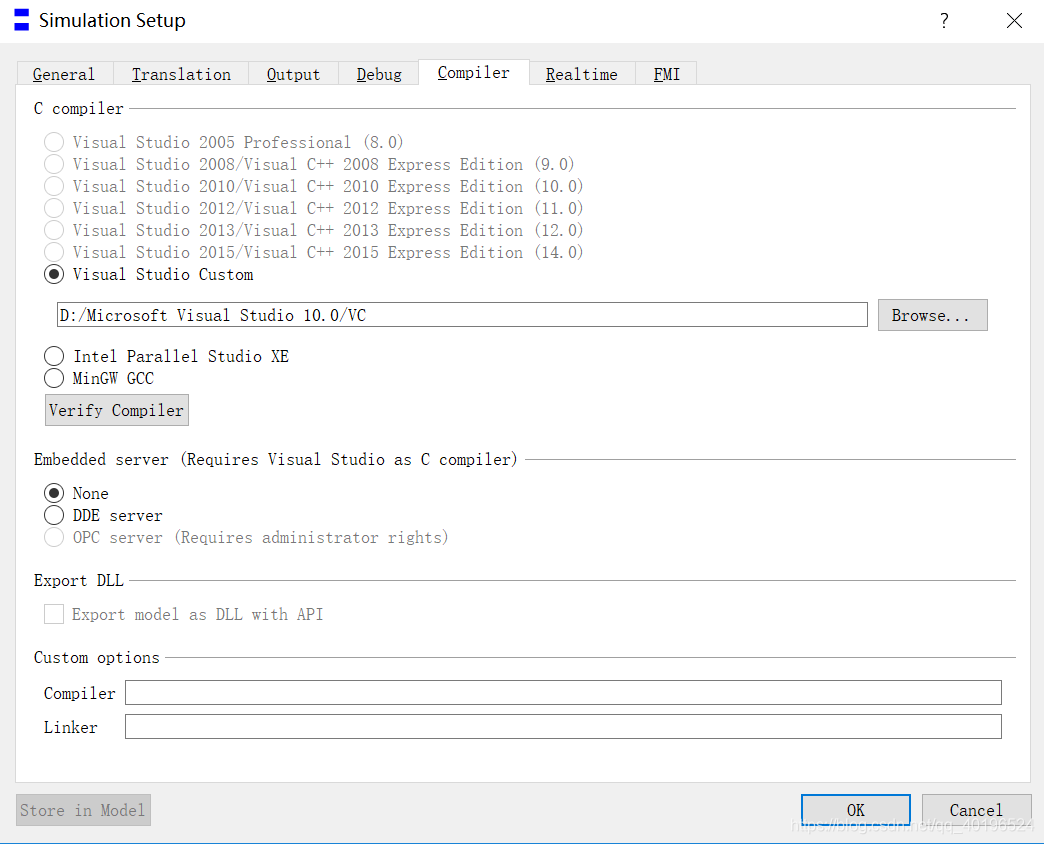
再次运行后就出现了
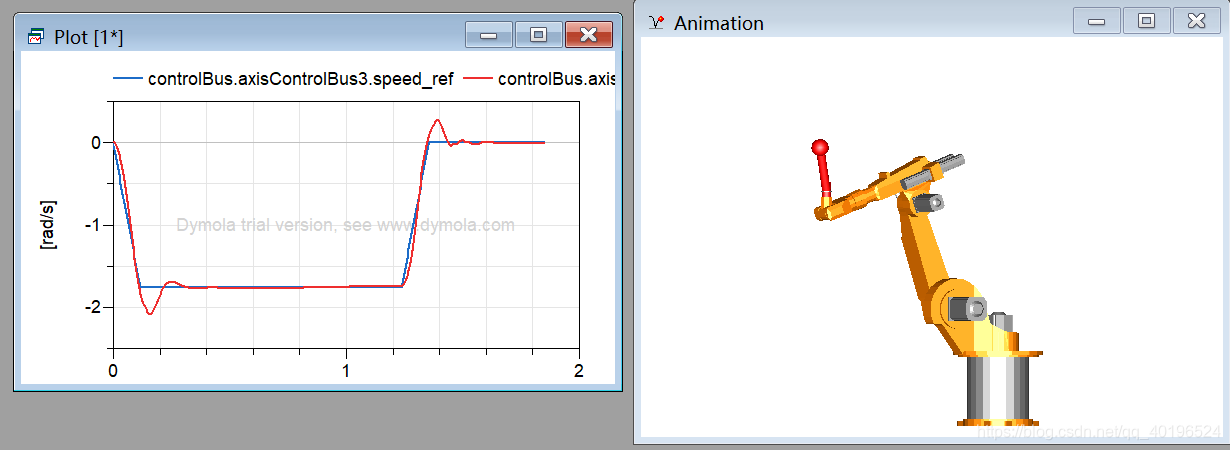
让我们开始为机器人制作动画。 通过选择“ Animation > Run ”或单击工具栏上的“run”按钮(最左侧的按钮)来启动动画

此工具栏分别包含运行,暂停,倒带和前进和后退的常用按钮。 此外,还显示了时间流,并且可以设置动画的速度(更高的数字意味着更高的速度)请注意,动画窗口可以用通常的方式在主窗口中最大化。
机器人的动画3D视图。
如果删除了错误的“动画”窗口,则可以使用“动画”>“新建动画窗口(Animation > New Animation Window. )”命令显示新窗口。 已经实现了使用鼠标直接操纵动画窗口中的视图。 可以使用鼠标移动结合Meta键移动,旋转和缩放视图
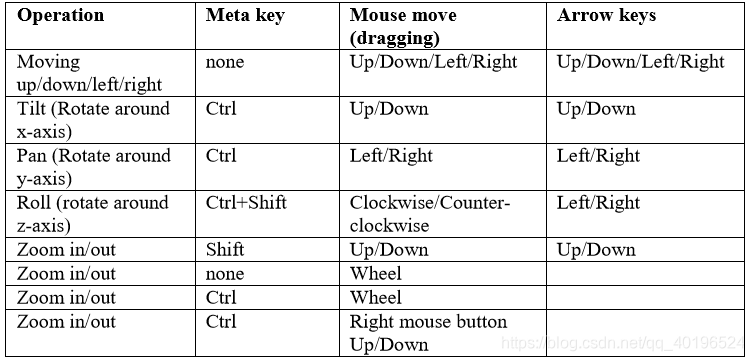
要在所选组件上设置旋转中心,请使用对象的上下文菜单,然后选择“当前对象”>“设置旋转中心(Current Object > Set Rotation Center. )”。 箭头键以5度的固定增量平移和倾斜,此外页面向上/向下翻页倾斜45度。 Home键重置查看转换。 现在让我们看一下情节窗口。 该图显示了第三关节的速度参考和实际速度。 显示感兴趣的特定组件的变量的一种非常方便的方法是在模拟模式下也使用编辑窗口的图层。 图层使用户能够通过显示变量来跟踪模拟,并通过设置参数来控制变量。 用户可以下降到模型的任何级别,以绘制或显示变量
按 Diagram layer button in the diagram layer toolbar to show the diagram

然后界面上就出现了上图的图框,根据官方的图片我好像少了个可以看参数的框。
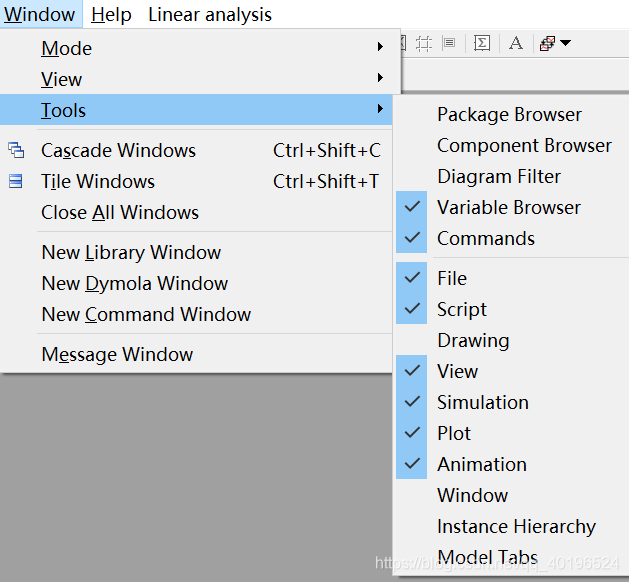
按照上图的位置选定variable browser就好了,这一页里面后很多其他的,根据自己需求显示把。