来参考安装。
1、添加ROS软件源
将下面这条命令复制到
ubuntu
的终端执行
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
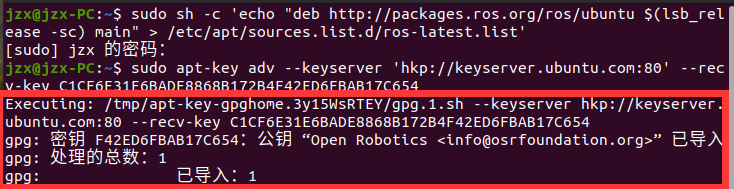
2、添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
成功后会显示如下界面:
3、更新软件源
sudo apt update
4、出现的问题
在这里遇到了无法添加软件源,以及之后出现的安装依赖包出错的问题,于是我在软件管理器里更改为清华源

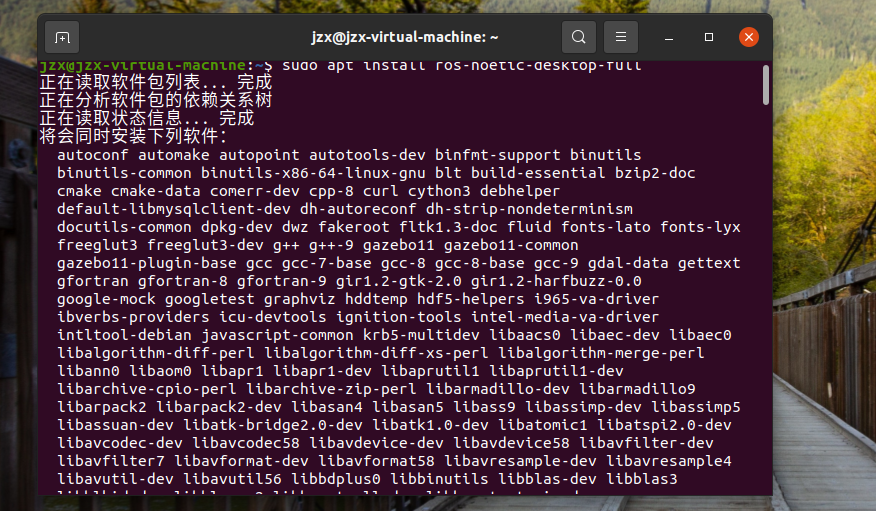
5、开始安装ROS
因ubuntu版本的不同其安装指令也有可能不同,在最开始的学习过程中,我选择安装melodic版本的ros,但因为不兼容,所以无法进行,20版本我们只能安装neotic:
sudo apt install ros-noetic-desktop-full
在这过程中,我遇到了如下问题,这是问题的翻译:
下列软件包有未满足的依赖关系:
ros-noetic-desktop-full : 依赖: ros-noetic-desktop 但是它将不会被安装
依赖: ros-noetic-perception 但是它将不会被安装
依赖: ros-noetic-simulators 但是它将不会被安装
依赖: ros-noetic-urdf-sim-tutorial 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
我选择了网上推荐的方法,即用sudo apt-get install aptitude 来自动适应版本,但是出现了aptitude也出现了依赖包缺失的问题,于是我根据如下文章换了方法:
Ubuntu20.04安装ROS Neotic修复依赖问题过程记录_canmoumou的博客-CSDN博客
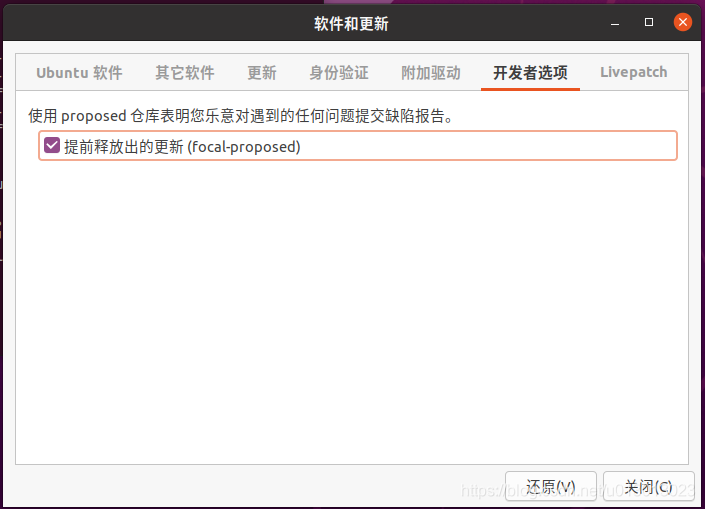
勾选focal-proposed选项:
(勾选这个选项以后,可安装的核心组件会变多,然而继续不更新)
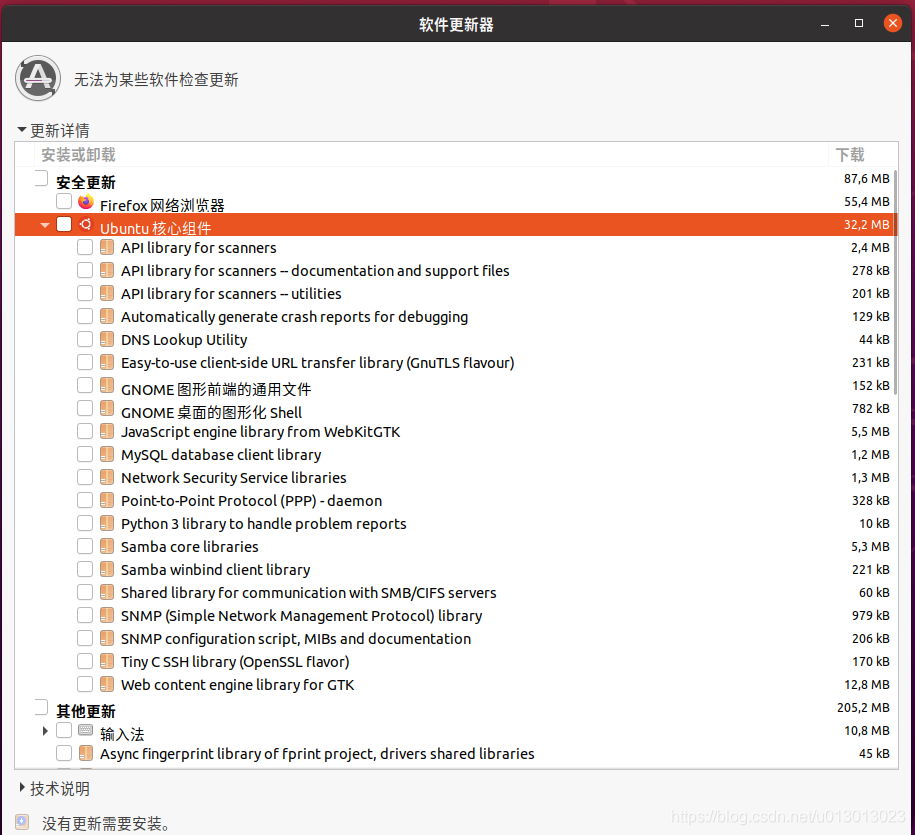
此时可以软件更新器中可以安装的更新分为 【安全更新】和【其他更新】,后者是勾选了focal选项后多出来的。
firefox和输入法也不要管,这时候只选择【安全更新】中的Ubuntu核心组件。
安装完毕后,sudo apt update。
接下来再次进行安装桌面版neotic会出现以下画面就算成功了:
jillian@jillian-VirtualBox:~$ sudo apt update
忽略:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal InRelease
获取:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal Release [3.788 B]
命中:3 http://mirrors.huaweicloud.com/repository/ubuntu focal InRelease
获取:4 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal Release.gpg [819 B]
命中:5 http://mirrors.huaweicloud.com/repository/ubuntu focal-updates InRelease
命中:6 http://mirrors.huaweicloud.com/repository/ubuntu focal-backports InRelease
获取:7 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal/main i386 Packages [15,4 kB]
命中:8 http://mirrors.huaweicloud.com/repository/ubuntu focal-security InRelease
获取:9 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal/main amd64 Packages [276 kB]
命中:10 http://mirrors.huaweicloud.com/repository/ubuntu focal-proposed InRelease
已下载 296 kB,耗时 1秒 (315 kB/s)
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
有 90 个软件包可以升级。请执行 ‘apt list --upgradable’ 来查看它们。
6、初始化rosdep
sudo rosdep init
rosdep update
幸运的是,在这一步我没有出现问题,那么接着做吧。
7.设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8、 安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
9、 验证ROS是否安装成功
roscore
若是出现以下画面,即安装成功

在最初的安装melodic的版本时,我将两个版本安装混淆了,所以会出现以下状况:

这里更换一下路径就可以了
source /opt/ros/noetic/setup.bash
接下来查阅古月居的教程,我们就可以尝试第一次使用海龟仿真器啦
