1.
minDisparity
最小可能的视差值。通常为
零
,但有时校正算法会偏移图像,因此需要相应地调整此参数。
2.numDisparities 最大视差减去最小视差。该值始终大于零。在当前的实现中,此参数必须可被16整除。
3.
P1
控制视差平滑度的第一个参数。此参数用于倾斜表面(非正视平行)的情况。
4.
P2
第二个参数控制视差平滑度。此参数用于“解决”深度不连续性问题。值越大,视差越平滑。P1是对相邻像素之间视差变化加或减1的惩罚。P2是相邻像素之间视差变化大于1的代价。该算法要求P2> P1。一些相当不错的P1和P2值(分别为8 * number_of_image_channels * SADWindowSize * SADWindowSize和32 * number_of_image_channels * SADWindowSize * SADWindowSize)。
5.
disp12MaxDiff
左右视差检查中允许的最大差异(以整数像素为单位)。将其设置为非正值可禁用检查。
preFilterCap 预过滤图像像素的截断值。该算法首先在每个像素处计算x导数,然后按[-preFilterCap,preFilterCap]间隔裁剪其值。结果值传递到Birchfield-Tomasi像素成本函数。
唯一性比率 最佳(最小)计算成本函数值应“赢得”次优值以认为找到的匹配正确的百分比裕度。通常,在5到15范围内的值就足够了。
6.
speckleWindowSize
平滑视差区域的最大大小,以考虑其噪声斑点并使其无效。将其设置为0以禁用斑点过滤。否则,将其设置在50-200范围内。
斑点范围 每个连接组件内的最大视差变化。如果执行斑点过滤,请将参数设置为正值,它将隐式乘以16。通常,1或2就足够了。
7.
块大小
匹配的块大小。它必须是> = 1的奇数。通常,它应该在3…11范围内。
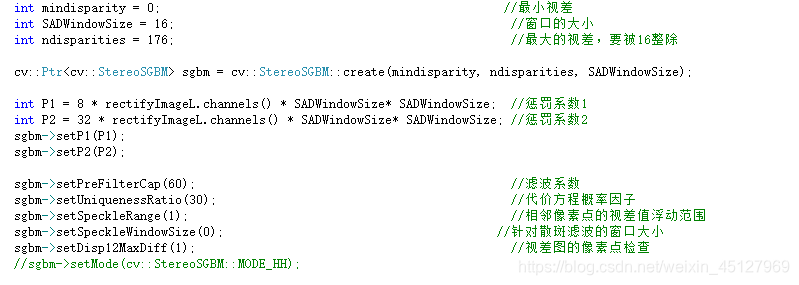
这是我设置的参数,仅供参考。