做完标定后,测试避障功能,都是坑
typedef pcl::PointXYZRGB PointT;
pcl::transformPointCloud(*cloud_in,*cloud,cam2rb);
pcl::copyPointCloud(*cloud_in,*cloud);
pcl::io::savePCDFileASCII ("cloud1_trans.pcd", *cloud); //pcl::io::savePCDFileBinary("cloud1_trans.pcd", *cloud);
若以pcl::PointXYZRGB读取pcd文件,copy一份然后保存到硬盘,用pcl_viewer看不到保存的点云
而后以pcl::PointXYZ读取,便可以看到。之前遇到到这个问题,如果pcd文件不含有rgb信息但强行以pcl::PointXYZRGB读取会自动赋值rgb为黑色(0, 0, 0),而pcl_viewer背景为黑色,所以看不到任何点云。but这次我读取的是带有rgb信息的pcd啊…
这是小插曲,后面开始踩坑
坑一
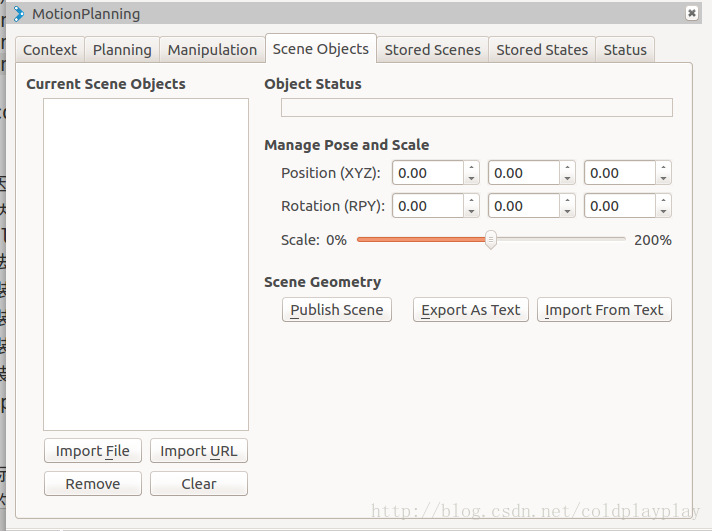
方法:moveit自带的MotionPlanning可以直接import file
试了下不能直接导入.pcd文件,但是可以直接导入.ply文件,所以直接运用
pcl::transformPointCloud(*cloud_in,*cloud,cam2rb);
得到基于机械臂base的点云,然后直接通过终端命令
pcl_pcd2ply xxx.pcd xxx.ply运行打开rviz
roslaunch ur3_moveit_config moveit_rviz.launch config:=true
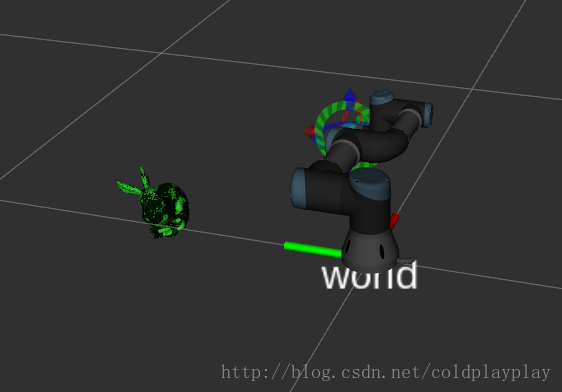
import网上的standford bunny,效果如图:
import刚才生成的xxx.ply文件,报错如下:
eigen: too many iterations in Jacobi transform.
rviz: /build/ogre-1.9-mqY1wq/ogre-1.9-1.9.0+dfsg1/OgreMain/include/OgreAxisAlignedBox.h:252:void Ogre::AxisAlignedBox::setExtents(const Ogre::Vector3&, const Ogre::Vector3&): 假设 ‘(min.x <= max.x && min.y <= max.y && min.z <= max.z) && "The minimum corner of the box must be less than or equal to maximum corner"’ 失败。
未解决。
坑二
方法:直接发布octomap给PlanningScene
定义PlanningScene的发布器
ros::Publisher octomap_pub = n.advertise<moveit_msgs::PlanningScene>("/planning_scene", 1);获取octomap数据
octomap::OcTree* octree = new octomap::OcTree(argv[1]);//命令行参数读入xxx.bt文件
static octomap_msgs::Octomap octomap;
octomap_msgs::binaryMapToMsg(*octree, octomap);//转换成消息格式定义planningscene的消息
moveit_msgs::PlanningScene planning_scene;
planning_scene.world.octomap.header.frame_id = "odom_combined";
planning_scene.world.octomap.header.stamp = ros::Time::now();
planning_scene.world.octomap.octomap.header.frame_id = "odom_combined";
planning_scene.world.octomap.octomap.header.stamp = ros::Time::now();
planning_scene.world.octomap.octomap.binary = true;
planning_scene.world.octomap.octomap.id = "OcTree";
planning_scene.world.octomap.octomap.data = octomap.data;发布PlanningScene消息
octomap_pub.publish(planning_scene);由于rviz一直没有显示出octomap数据,添加如下语句,验证rviz有在订阅消息
while (octomap_pub.getNumSubscribers() < 1)
{
ros::WallDuration sleep_t(0.5);
sleep_t.sleep();
}
ROS_INFO("more than one subscriber, start publishing msgs on and on...");
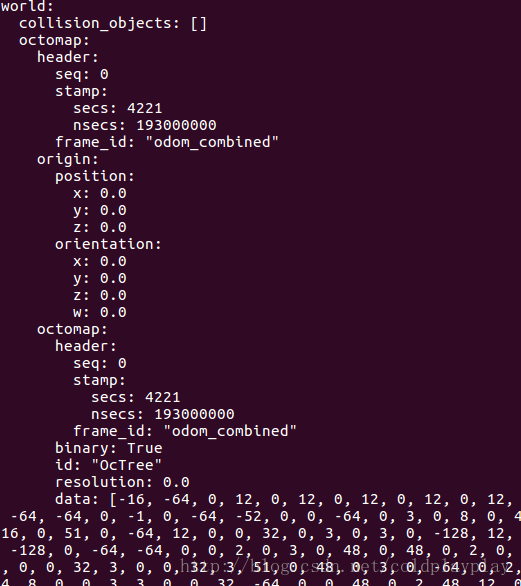
但是rviz什么场景都显示不出来,通过
rostopic echo /planning_scene
发现主要问题是消息的seq为0
网上说主要是没有订阅者。。。
未解决。
最后尝试了config的方法,终于可行了
建立sensor_moveit_config包(我放在了universial_robot文件夹内,新建一个package专门放sensor配置,方便ur3/5/10调用)
catkin_create_pkg sensor_moveit_config roscpp rospy std_msgs moveit_ros_move_group moveit_ros_visualization
在sensor_moveit_config包内新建config和launch文件夹
config文件夹内新建sensors_rgbd.yaml,填入如下内容
sensors:
- sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
point_cloud_topic: /zed_trans
max_range: 10
padding_offset: 0.01
padding_scale: 1.0
point_subsample: 1
filtered_cloud_topic: output_cloud
# this last topic is just to debug, having it adds processing time
# sensors:
# - sensor_plugin: occupancy_map_monitor/DepthImageOctomapUpdater
# image_topic: /head_mount_xtion/depth/image_raw
# queue_size: 5
# near_clipping_plane_distance: 0.3
# far_clipping_plane_distance: 5.0
# skip_vertical_pixels: 1
# skip_horizontal_pixels: 1
# shadow_threshold: 0.2
# padding_scale: 4.0
# padding_offset: 0.03
# filtered_cloud_topic: output_cloud在launch文件夹内新建kinect2_moveit_sensor_manager.launch.xml和sensor_manager.launch.xml
<launch>
<rosparam command = "load" file="$(find sensor_moveit_config)/config/sensors_rgbd.yaml" />
</launch><launch>
<!-- This file makes it easy to include the settings for sensor managers -->
<!-- Params for the octomap monitor -->
<!-- <param name="octomap_frame" type="string" value="some frame in which the robot moves" /> -->
<param name="octomap_resolution" type="double" value="0.025" />
<param name="max_range" type="double" value="5.0" />
<!-- Load the robot specific sensor manager; this sets the moveit_sensor_manager ROS parameter -->
<arg name="moveit_sensor_manager" default="kinect2" />
<include file="$(find sensor_moveit_config)/launch/$(arg moveit_sensor_manager)_moveit_sensor_manager.launch.xml" />
</launch>编译
catkin_make在ur3_moveit_config/launch/move_group.launch添加如下程序
<include ns="move_group" file="$(find sensor_moveit_config)/launch/sensor_manager.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_sensor_manager" value="kinect2" />
</include>命令行按顺序调用:
roslaunch ur_gazebo ur3_joint_limited.launch
roslaunch ur3_moveit_config ur3_moveit_planning_execution.launch sim:=true limited:=true
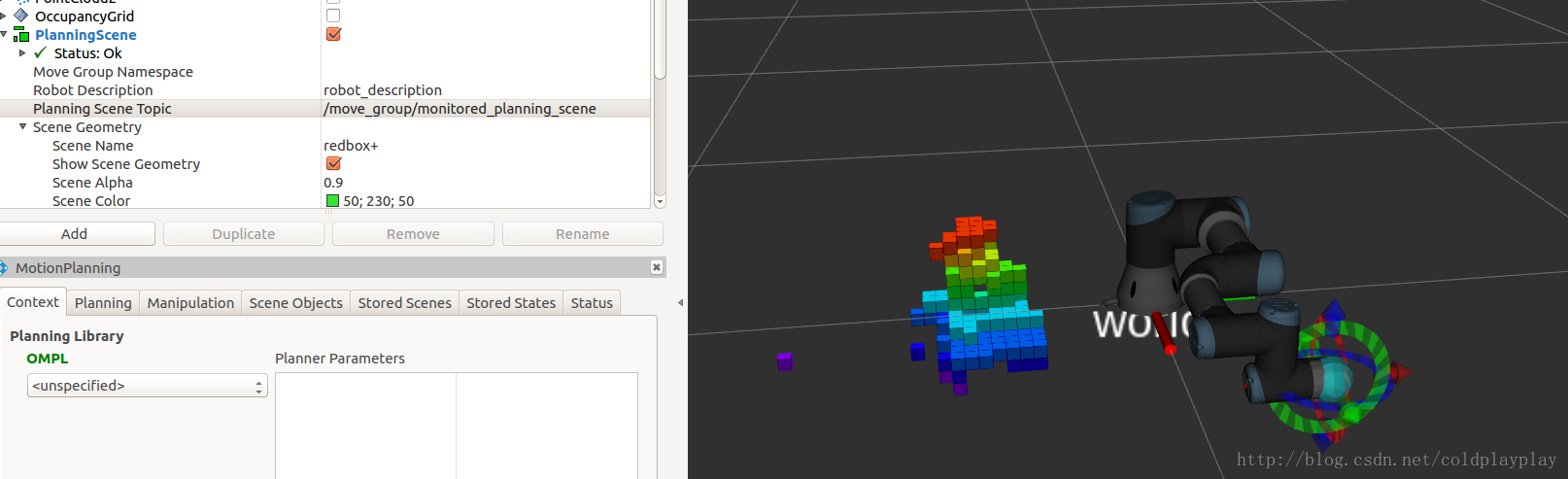
roslaunch ur3_moveit_config moveit_rviz.launch config:=true
rosrun rviz_show rviz_show_octo_from_pcd redbox.pcd
结果如下:
参考
3D Perception Moveit Docs
ros机器人程序设计Indigo
github——pr2 moveit config
坑二相关
moveit_msgs——PlanningScene
添加各种格式的planningScene
seq = 0的问题
Why does ROS overwrite my sequence number?