目录
(5) 测试是否正常安装 (成功会出现带 “hello opcv” 字样的窗口)
四、安装Eigen3.3.7 (建议源码安装) Eigen3.3.7链接 提取码:slam
五、安装 运行ORB_SLAM2 (如果在ROS下 推荐工程目录: orbslam_ws/src )
一、预备安装工具
(1)更新apt库,更新软件列表
sudo apt-get update
(2)安装git
sudo apt-get install git
(3)安装cmake
sudo apt-get install cmake
(4)安装gcc、g++
sudo apt-get install g++
二、安装Pangolin作为可视化和用户界面
(1)安装依赖项
sudo apt-get install libglew-dev
sudo apt-get install cmake
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
(2)将项目从github上下载到本地
git clone https://github.com/stevenlovegrove/Pangolin.git
(3)编译安装
cd Pangolin
mkdir build
cd build
cmake ..
make -j
sudo make install
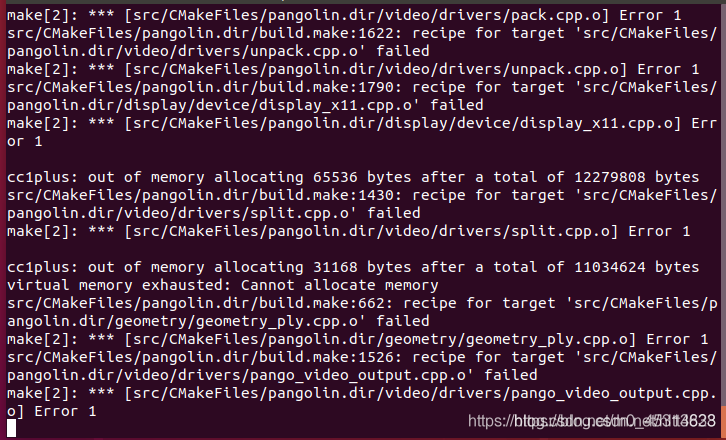
cmake 出现以下情况,就将
cmake 改为
make 就可以了
三、安装opencv,用于处理图像和特征
(1)安装依赖项
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
(2)下载 相关的包
opencv3.4.5链接:https://pan.baidu.com/s/1XFsJMEgDPWRLiyGrAzVl4A提取码都是:slam
wget -O opencv-3.4.5.zip https://github.com/Itseez/opencv/archive/3.4.5.zip
(3)编译安装
cd ~/opencv-3.4.5 // 看看自己包的位置在哪
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j8
编译过程会花费较长时间,可以使用make -jx,x表示线程,可以加速编译
编译成功如下图:
sudo make install
(4)配置opencv的编译环境
将opencv的库添加到路径
sudo gedit /etc/ld.so.conf.d/opencv.conf
在文件末尾添加:
上面的程序执行后会出现文档,添加下面的内容
/usr/local/lib 保存回到命令行界面,执行命令让刚才的配置路径生效:
sudo ldconfig
配置bash
sudo gedit /etc/bash.bashrc
在最末尾添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH 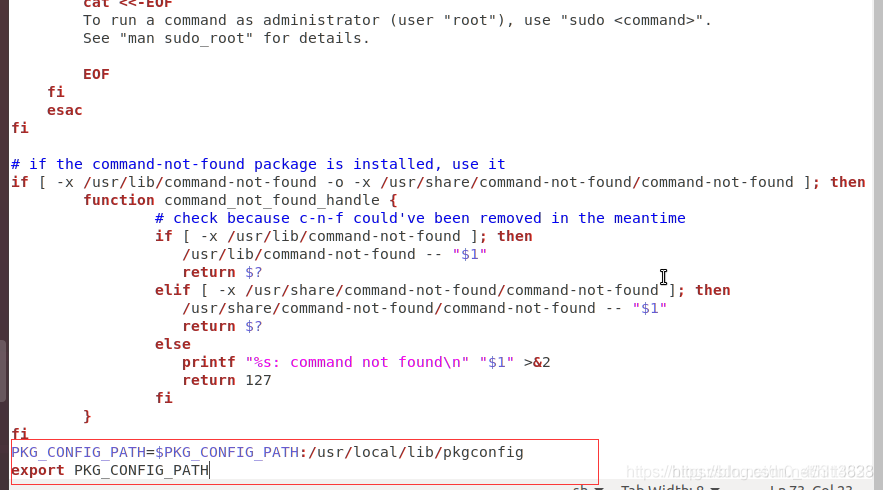
source /etc/bash.bashrc
(5) 测试是否正常安装 (成功会出现带 “hello opcv” 字样的窗口)
cd opencv-3.4.5/samples/cpp/example_cmakecmake .make./opencv_example
四、安装Eigen3.3.7 (建议源码安装) Eigen3.3.7链接 提取码:slam
eigen3.3.7链接:https://pan.baidu.com/s/1AOKO3Xk9_Rg_qUPTaTKoW提取码都是:slam
cd eigen-git-mirrormkdir buildcd buildcmake ..sudo make install
安装后 头文件安装在
/usr/local/include/eigen3/
移动头文件
–
r /usr/local/include/eigen3/Eigen /usr/local/include
在很多程序中
include
时经常使用
#include <Eigen/Dense>
而不是使用 #include <eigen3/Eigen/Dense>
五、安装 运行ORB_SLAM2 (如果在ROS下 推荐工程目录: orbslam_ws/src )
mkdir orb_slamcd orb_slammkdir srccd srcgit clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2cd orb_slam/src/ORB_SLAM2
//我的程序放的位置,根据你自己的进入chmod +x build.sh./build.sh
在对应的头文件中加上
#include <unistd.h>

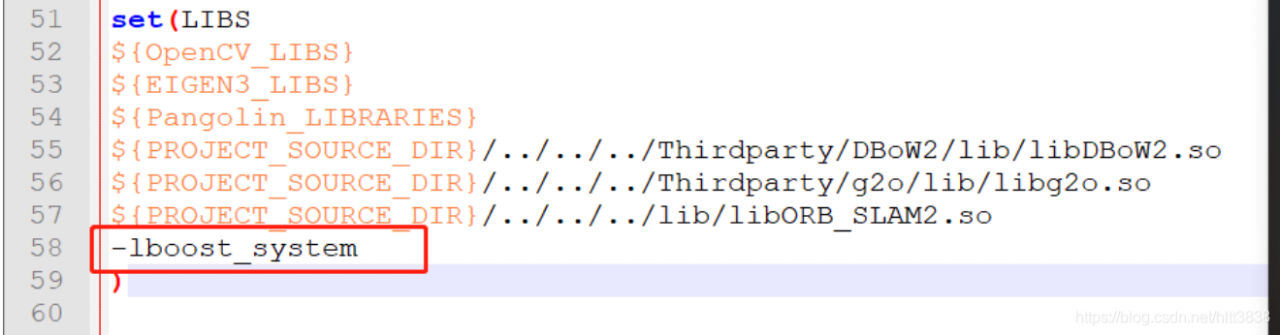
boost
库
相关错误:
修改
Examples/ROS/ORB_SLAM2/
文件夹下的
CMakeLists.txt
文 件

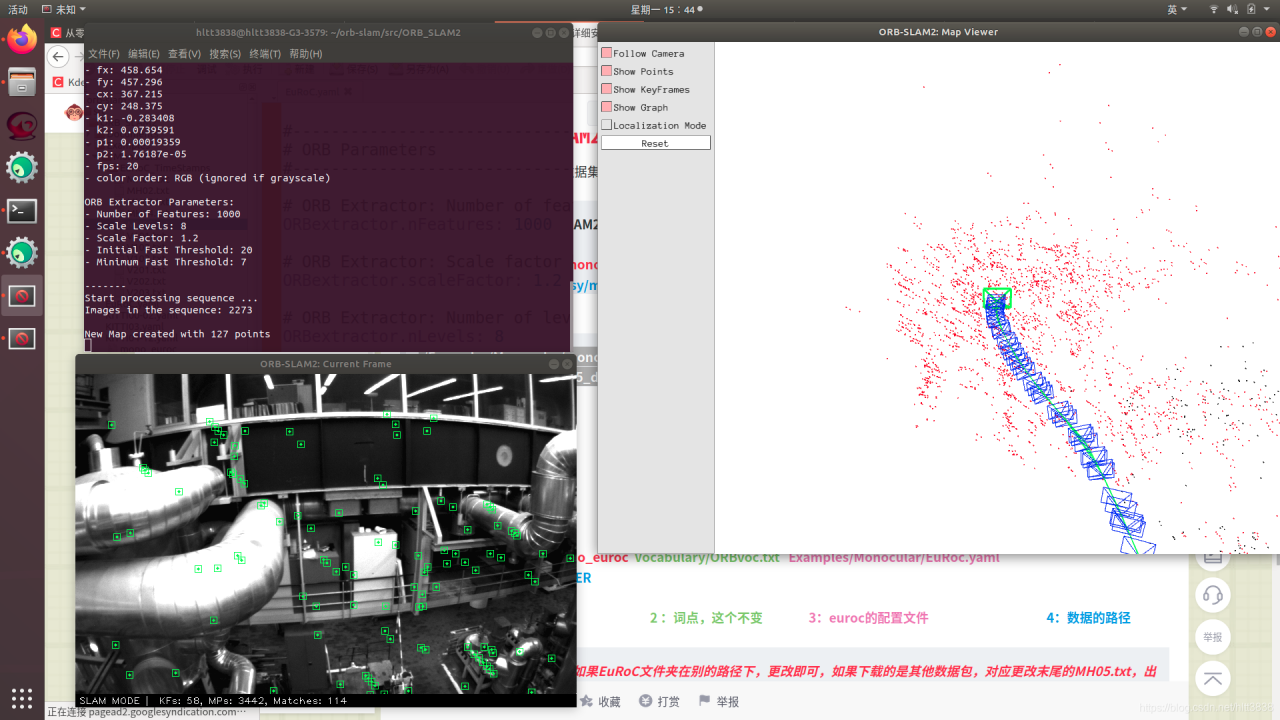
六、 运行ORB_SLAM2 程序
cd orb_slam/src/ORB_SLAM2
./Examples/Monocular/mono_euroc
Vocabulary/ORBvoc.txt
Examples/Monocular/EuRoC.yaml
/home/hltt3838/EuRoC_data/MH_01_easy/mav0/cam0/data
Examples/Monocular/EuRoC_TimeStamps/MH01.txt
./Examples/Monocular/mono_euroc
Vocabulary/ORBvoc.txt
Examples/Monocular/EuRoC.yaml
/media/hltt3838/DATA/EuRoc_data/MH_05_difficult/mav0/cam0/data
Examples/Monocular/EuRoC_TimeStamps/MH05.txt
1: 对应的mian.c 函数
2 :词点,这个不变
3:euroc的配置文件
4:数据的路径
用户名写你的客户机名称,如果EuRoC文件夹在别的路径下,更改即可,如果下载的是其他数据包,对应更改末尾的MH05.txt,出现任何问题基本都是路径问题,仔细检查路径。
理解:运行的程序只是他们提供的一种方式,当你真的掌握这套程序后,很多的内容是可以改的!
Ctrl + c 可以停止运行的程序
运行中的状态,结束后窗口自动关闭,并在终端显示这一行
![]()
七、 EVO评测
这部分借鉴博客
https://blog.csdn.net/gyhjlauy/article/details/100598260
https://blog.csdn.net/A_L_A_N/article/details/88708979
https://blog.csdn.net/gaoyuzhong123/article/details/103211830