3.摇杆模块测试
摇臂模块实际上是两个可调电阻(X轴和Y轴)和一个开关,当摇臂头位于中间时是电阻的一半,当移动到一侧时,电阻减小到最小值,移向另一个电阻最大,X / Y轴是相同的,当下压头摇臂开关接地时,没有按下开关为高电平,因为不下拉/处理,水平有浮动是正常的。
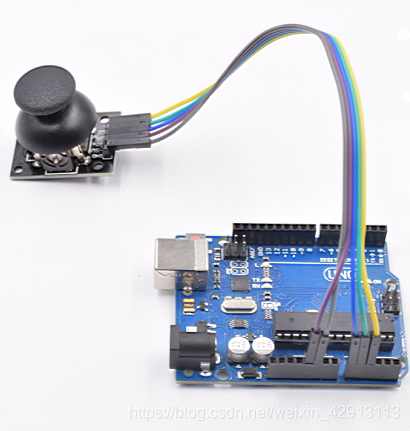
接线模式:
摇杆模块 arduino
GND ——————————————GND
+5V——————————————— 5V
VRX———————————————A0
VRY———————————————-A1
SW ———————————————–A2
代码:
int xpotpin=0;
int ypotpin=1;
int bpotpin=2;
int xval=0;
int yval=0;
int bval=0;
void setup() {
// put your setup code here, to run once:
pinMode(xpotpin,INPUT);
pinMode(ypotpin,INPUT);
pinMode(bpotpin,INPUT);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
xval=analogRead(xpotpin);
Serial.print("X= ");
Serial.println(xval);
yval=analogRead(ypotpin);
Serial.print("Y= ");
Serial.println(yval);
bval=analogRead(bpotpin);
Serial.print("B= ");
Serial.println(bval);
delay(6000);
}
版权声明:本文为weixin_42913113原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。