里程计面临的挑战:
- 6 DOF,精确,无偏的里程计信息
- 实时高速,硬件结构小巧
- 对抖动等鲁棒
- 对传感器限制(高速公路等重复度高的场景精确度低)鲁棒
Point-to-point ICP
步骤:
- 扫描两个相关点的集合
- 做最近匹配
- 使用牛顿法或者LM迭代优化

缺陷:精度高度依赖于初始化情况
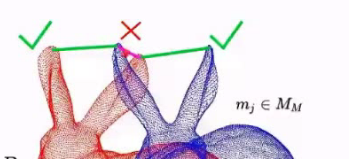
图中的错误匹配没有办法remove,于是有人提出了Point-to-plane ICP
Point-to-plane ICP
- 扫描两个相关点的集合
- 做最近匹配
- 计算集合中的点的法向量
- 使用牛顿法或者LM迭代优化
法向量求解:
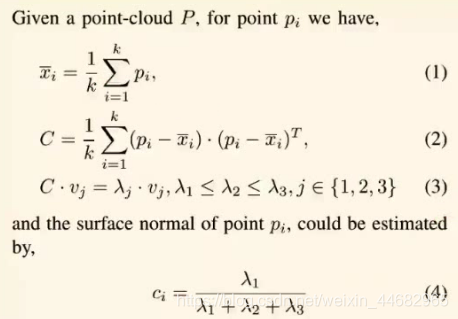

加入了方向和法向量之间的夹角,可以remove图中兔子耳朵部分的错误匹配
缺陷:图中类似于兔子嘴巴部分的错误匹配依然无法被remove
于是有人提出了Plane-to-plane ICP
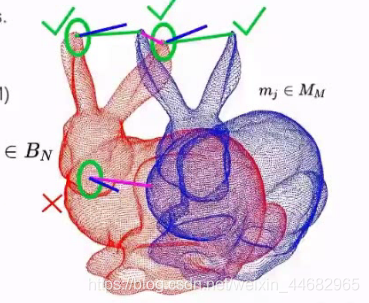
Plane-to-plane ICP
- 扫描两个相关点的集合
- 做最近匹配
- 计算集合中的点的法向量
- 计算另一个集合中的点的法向量和二者的方向向量
- 使用牛顿法或者LM迭代优化
设红色点云:B,蓝色点云:M
服从高斯分布
比较:
Point-to-point ICP:快,但是不鲁棒
Point-to-plane ICP:速度、鲁棒性中等
Plane-to-plane ICP:最慢,精度最高
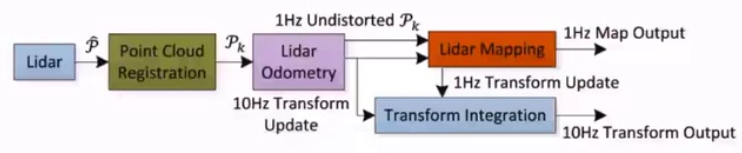
激光里程计 LiDAR Odometry
setting:里程计信息+地图信息
假设:运动过程相对匀速,抖动不明显
改进:
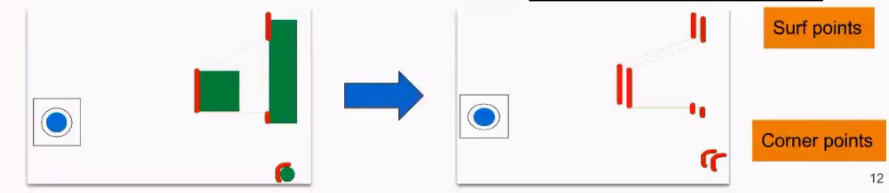
激光扫描可以很容易的获得点的曲率(利用当前点和周围点近似估计)

X:集合中的点,N:激光的线数,n:第n根线
将点分成两类点:平面的点(surf points)、角上的点(Corner points)
计算距离:
Corner points:
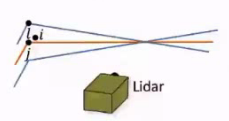
蓝色点:上一时刻的线扫
黄色点:本时刻的线扫
点到点的计算:

surf points:
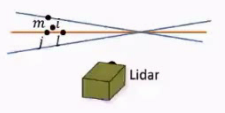
点到面的计算:
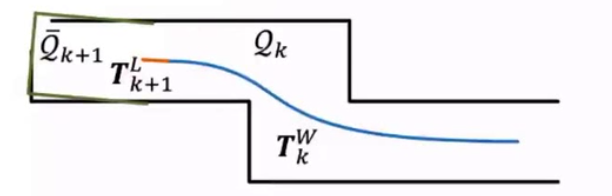
激光的插值:
目的:提高激光的精度(激光在tk时刻发射,等收集到一定数据之后再将数据打包回传,但此时已经是tk+1时刻,传感器已经运动了一段距离,但传感器依旧以tk时刻作为参照,要通过差值提高精度)

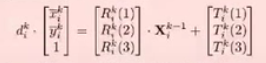
因此已知tk时刻的位置信息和tk+1时刻的位置信息,中间时刻的位置信息由以下插值函数计算:
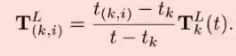
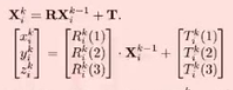
求解旋转平移矩阵
上一时刻点: X(k-1,i)
此时刻点: X(k,i)
旋转矩阵:R(k,i) ,平移矩阵:τ(k,i)
得到:X(k,i) = R(k,i) × X(k-1,i) + τ(k,i)
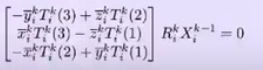
距离:
F(Tk(t)) = d
求解旋转平移矩阵Tk(t)
平移:τ:x,y,z
旋转矩阵表达方式:Rodrigues‘ Formula(易求导)
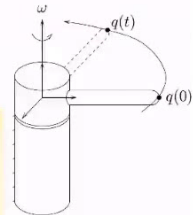
当前位置:q,旋转轴:w
角速度:
叉乘运算,求角速度,利用反对称矩阵将叉乘计算转换为点乘计算
![]()
整理得:
旋转一定角度:

定理1:

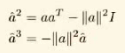
假设:

可得:
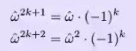
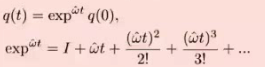
exp(wt)可以转换为:
化成此形式最大的优点就是求导简易:
优化方法:

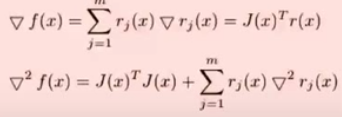
假定r是向量矩阵,形式:

雅可比矩阵:
![]()
一阶导数、二阶导数,求导
梯度下降法:

缺点:
梯度下降法在陡峭的部分下降快,但在平缓的部分十分慢
牛顿法:
改进梯度下降法(依赖于一阶导),更依赖于二阶导

优点:速度快
缺点:对初值的要求高,初值选的好,会非常快,初值选的不好,效果很一般
于是有人提出了LM算法
LM:
梯度下降法和牛顿法的融合,不仅考虑了二阶导,还考虑了一阶导

缺点:系数只能手动调整,不能动态调整
改进:
![]()
优点:
在平滑的区域,H矩阵发挥作用较大,趋向于使用牛顿法
在陡峭的区域,即远端处,起更大作用的是系数,趋向于使用梯度下降法
激光里程计步骤:
- 激光扫描计算曲率
- 通过插值的方法优化每个点的信息
- 分别计算surf点和corner点的距离关系
- LM优化(在实际工程中,更倾向于使用高斯牛顿优化)
Local Mapping
- local map被储存到kd-tree中(可快速查找)
- 后面的点被丢弃(为了保证效率,kd-tree不能过大)
- 此时提取特征点是之前的十倍,精度更高
已达到目标:6-DOF,精度高,低漂移,实时,速度快
但是对抖动剧烈的情况不鲁棒
改进:
Visual LiDAR Odometry
以激光得到的深度信息补充视觉里程计中的深度信息
Visual Odometry:
将Xk改为:

得到:
若是有深度信息的特征点(恰巧这个点的位置也有激光扫过得到的深度信息)
构建约束:

没有深度信息构建约束:

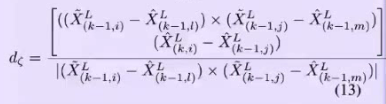
残差约束:
![]()
若有深度信息特征点n个,没有深度信息特征点m个,则约束2n+m+1(残差约束)
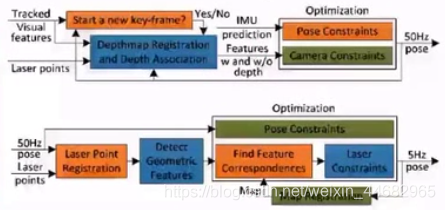
视觉雷达里程计步骤:
- feature tracking
- 获取depth信息
- 利用2n+m+1个约束构建loss function
- 激光里程计

已达到目标:6-DOF,精度高,低漂移,实时,速度快,克服aggressive motion(剧烈抖动)
但是对传感器的limitation不鲁棒
改进:
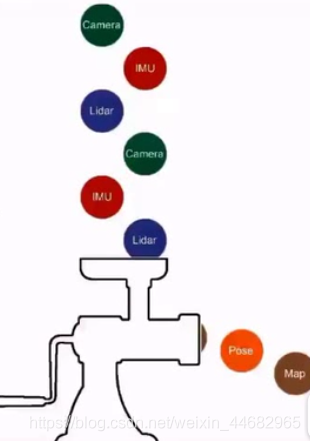
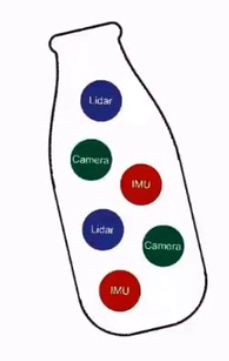
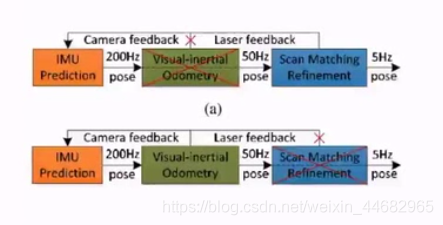
Sensor Fusion
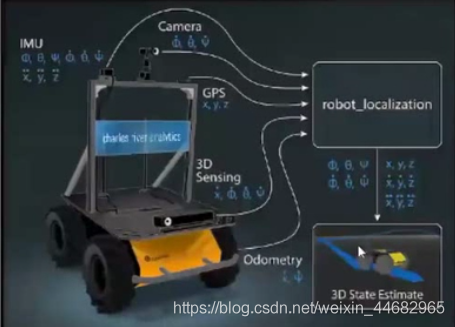
顺序问题很重要
基于图优化:
重点是各传感器数据之间的关系,构建各个节点的场景约束
只能在小场景中使用
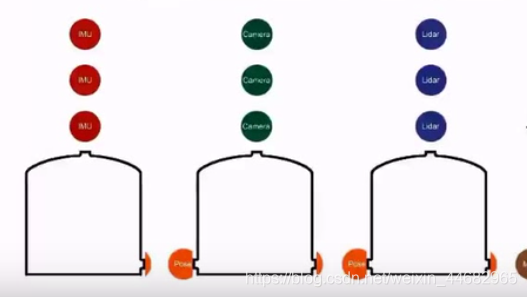
改进:
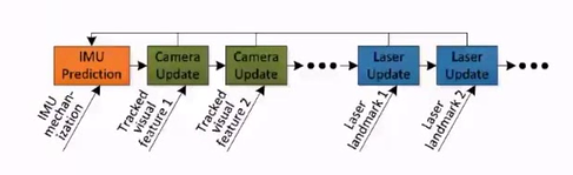
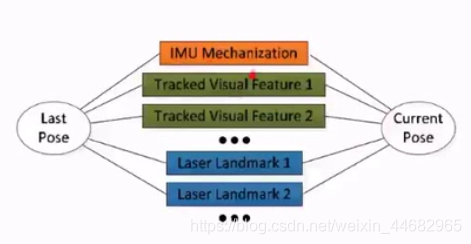
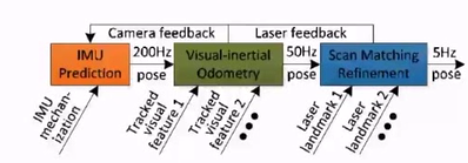
Hierarchical
粗糙到精确:IMU估计->visual估计(以IMU估计为前端)->激光
每一个模块都基于前一个模块
IMU:
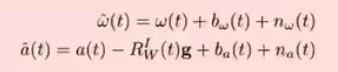
w(t)是角速度,bw(t)贝叶斯偏置,nw(t)噪声
加速度a(t),-Rw(t)g必须要减去,否则机器人的抖动影响过大,比如无人机的高空飞行
当视觉里程计失效的时候,直接跨过,用IMU来补足激光需要的信息()夜晚
当激光里程计失效的时候,直接跨过,用视觉来输出(狭长的隧道,结构相似)
已达到目标:6-DOF,精度高,低漂移,实时,速度快,克服aggressive motion(剧烈抖动) ,对传感器的limitation鲁棒