三、机械臂的运动仿真模拟
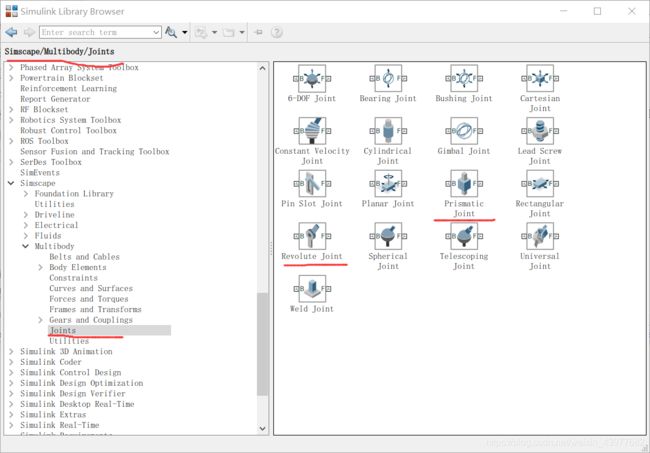
1.在第一节中,我们已经搭建了机械臂的模型,但他目前只是一个刚体模型,不具备任何运动条件,现在我们需要在他的关节处添加关节模型。目前,我们只需要旋转关节和平动关节,如图所示:
将我们需要的关节插入到之前建立的关节模型中。
后期补充:下图有一个地方是错误的,第一个关节应该 在第一节连杆与第二节连杆之间,调整一下顺序即可。
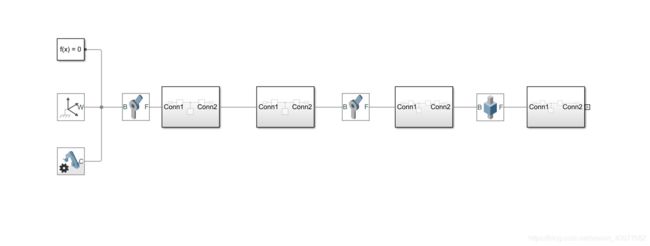
如上图所示,第一个关节所在的空间为世界坐标系原点空间,第二个关节所在空间为第二节连杆的末端所在空间,但三个关节是第三节连杆末端所在空间。
仔细观察上图,发现,最后一个关节后,还附加了一个关节,这是为什么呢?
是因为,当存在一个关节时,必须存在一个实体连杆使得关节可以驱动,如果没有,则关节的输出目标为空。
2.关节设置
双击某个关节,查看其属性设置: